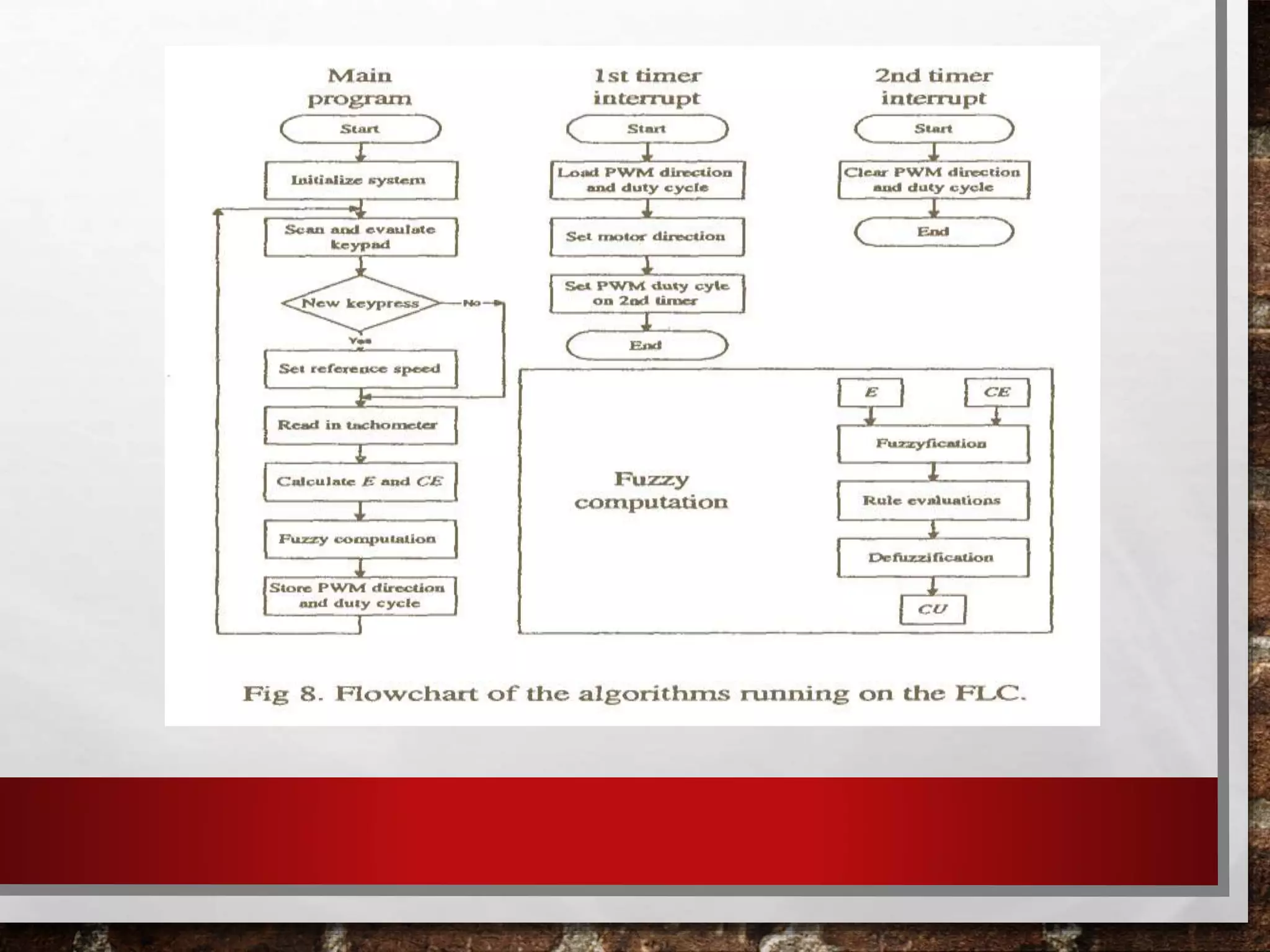
The document describes a fuzzy logic modification of a PID controller for DC motor speed control. It was implemented using a microcontroller. The fuzzy logic controller was designed to improve on PID controllers and reduce the effects of nonlinearity in DC motors. The design process included defining linguistic variables and membership functions for the inputs and outputs, then adjusting the functions and rules to improve performance. The hardware implementation used a microcontroller with analog and digital input/output ports to receive sensor feedback and control the motor. The fuzzy logic controller was able to achieve better speed control of the DC motor compared to a traditional PID controller.

![CHRONICLE:
Lotfi A. Zadeh, a professor of UC Berkeley in California, soon to be known as
the founder of fuzzy logic observed that conventional computer logic was
incapable of manipulating data representing subjective or vague human
ideas such as "an atractive person" .
Fuzzy logic, hence was designed to allow computers to determine the
distinctions among data with shades of gray, similar to the process of
human reasoning.
This theory proposed making the membership function (or the values
False and True) operate over the range of real numbers [0.0, 1.0]. Fuzzy
logic was now introduced to the world.](https://image.slidesharecdn.com/projectpresentation-170618102518/75/DC-Drive-Speed-Control-using-Fuzzy-Logic-Controller-6-2048.jpg)