Downloaded 72 times

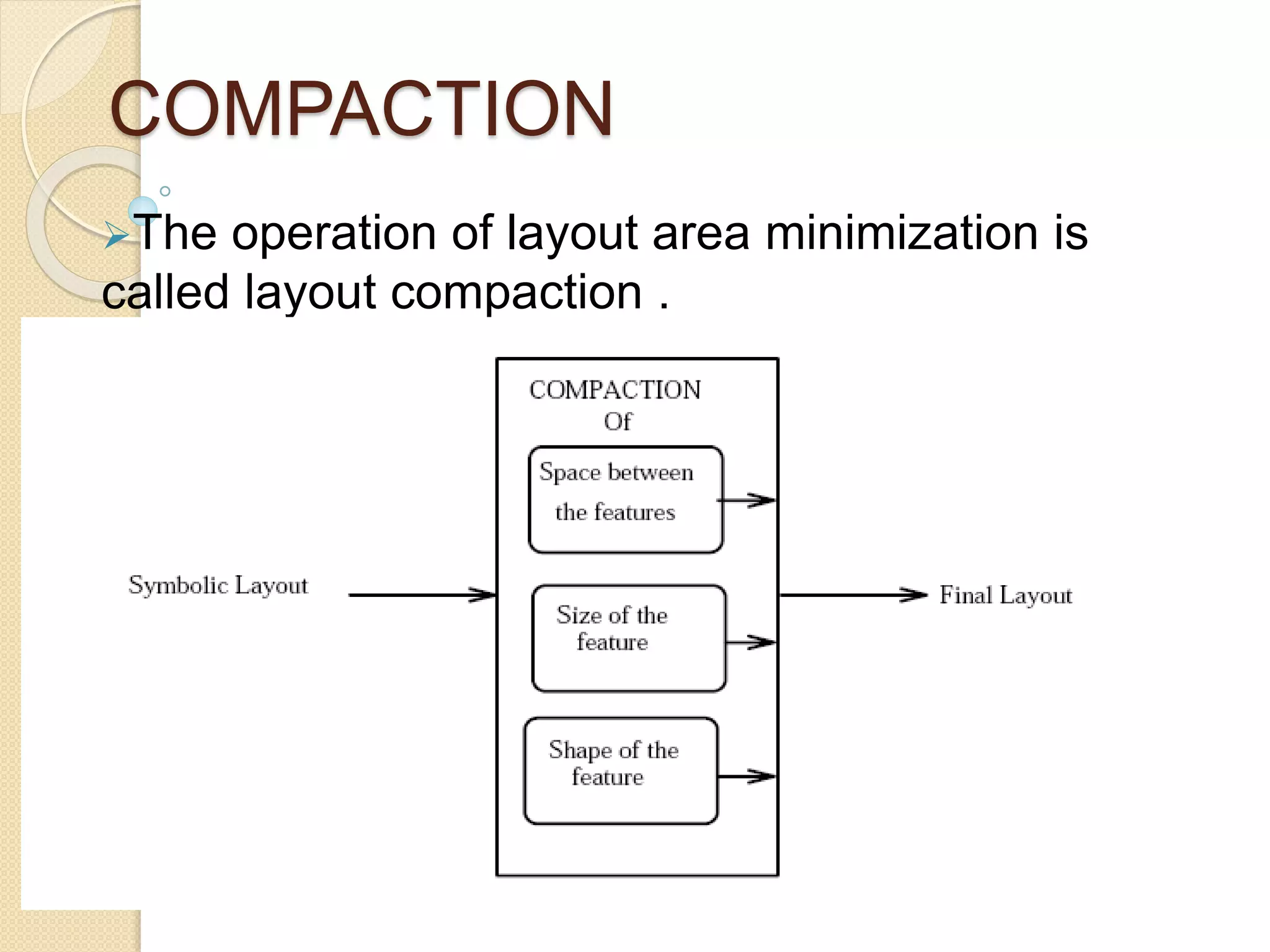
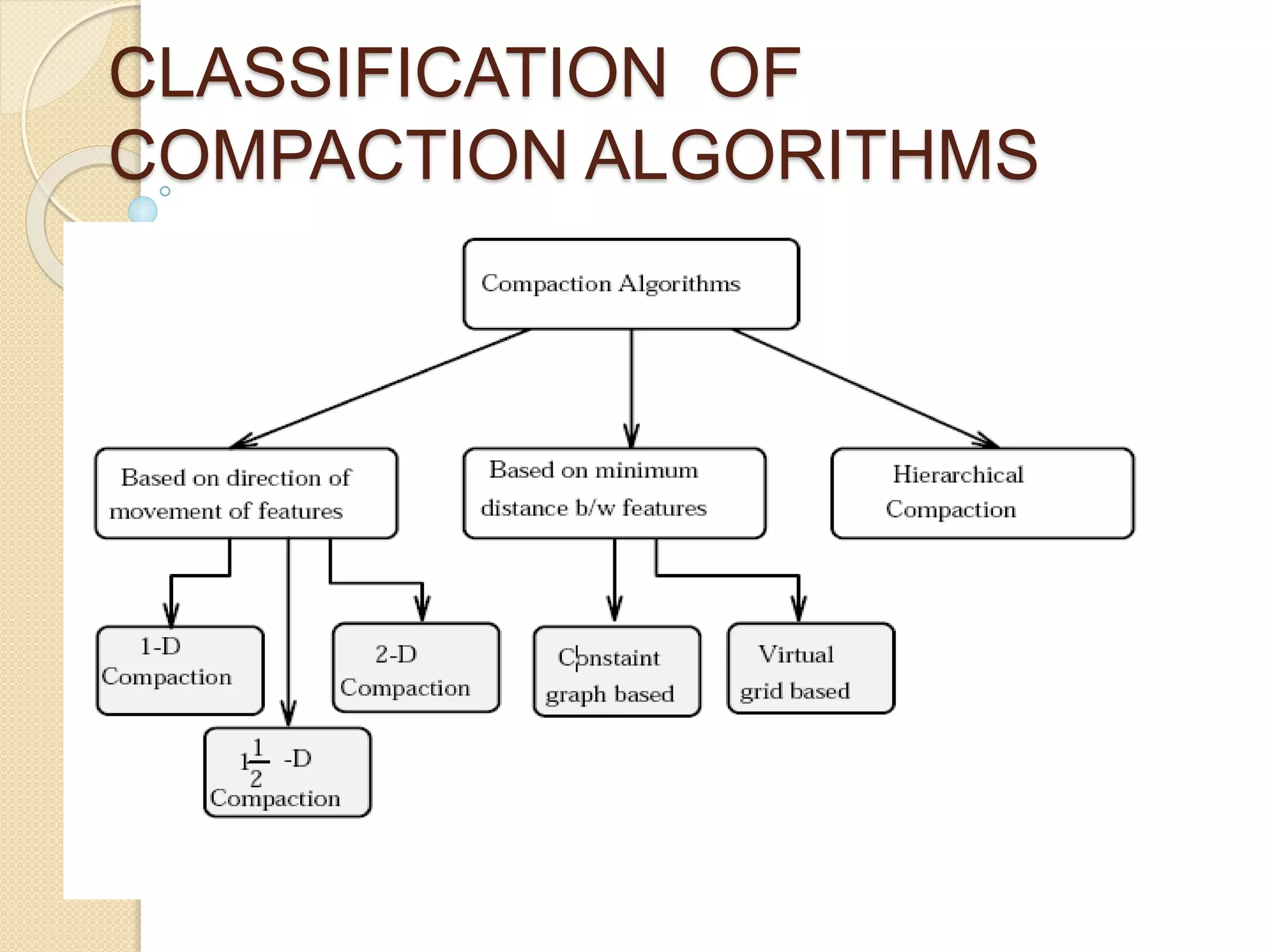
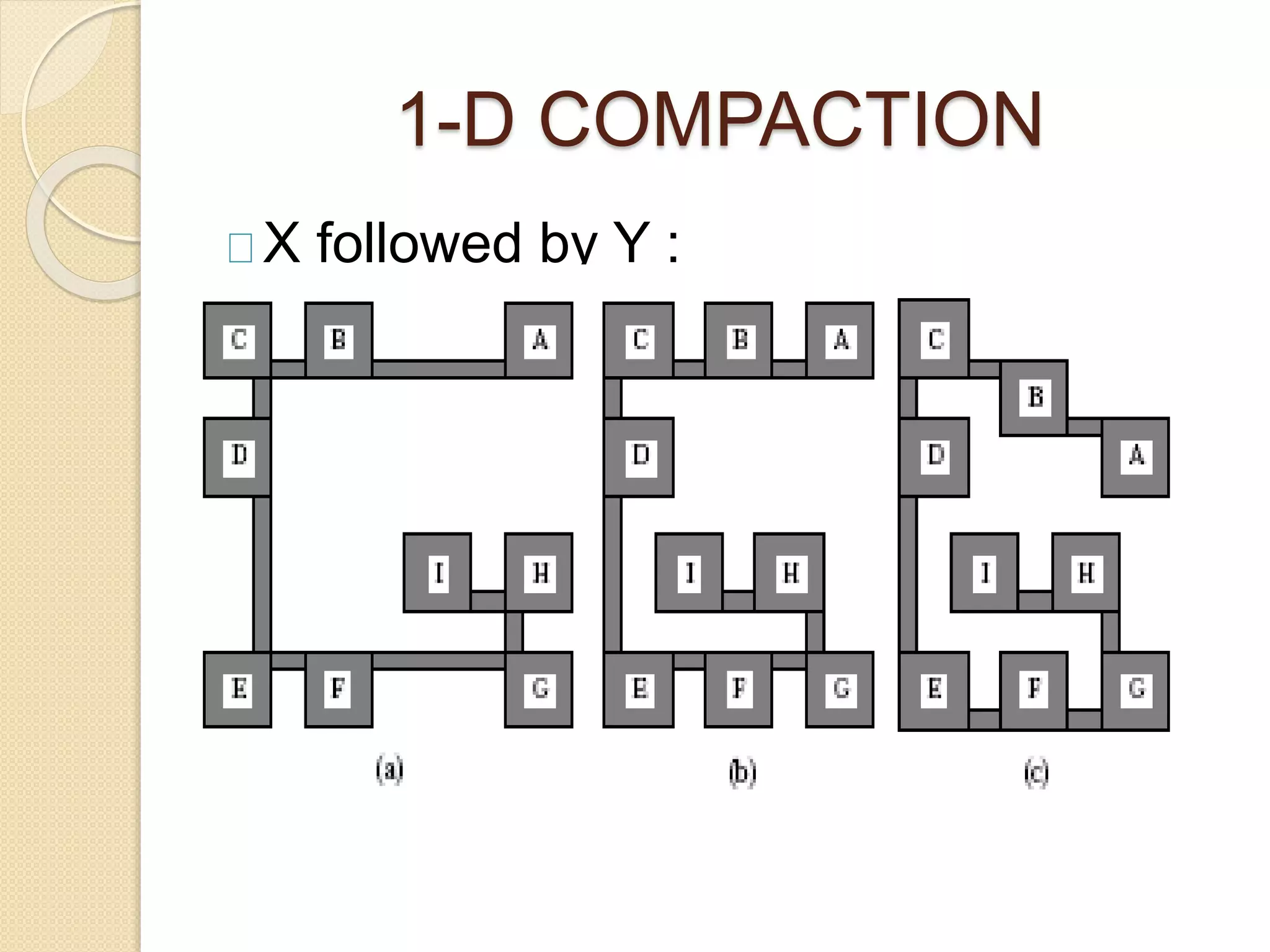
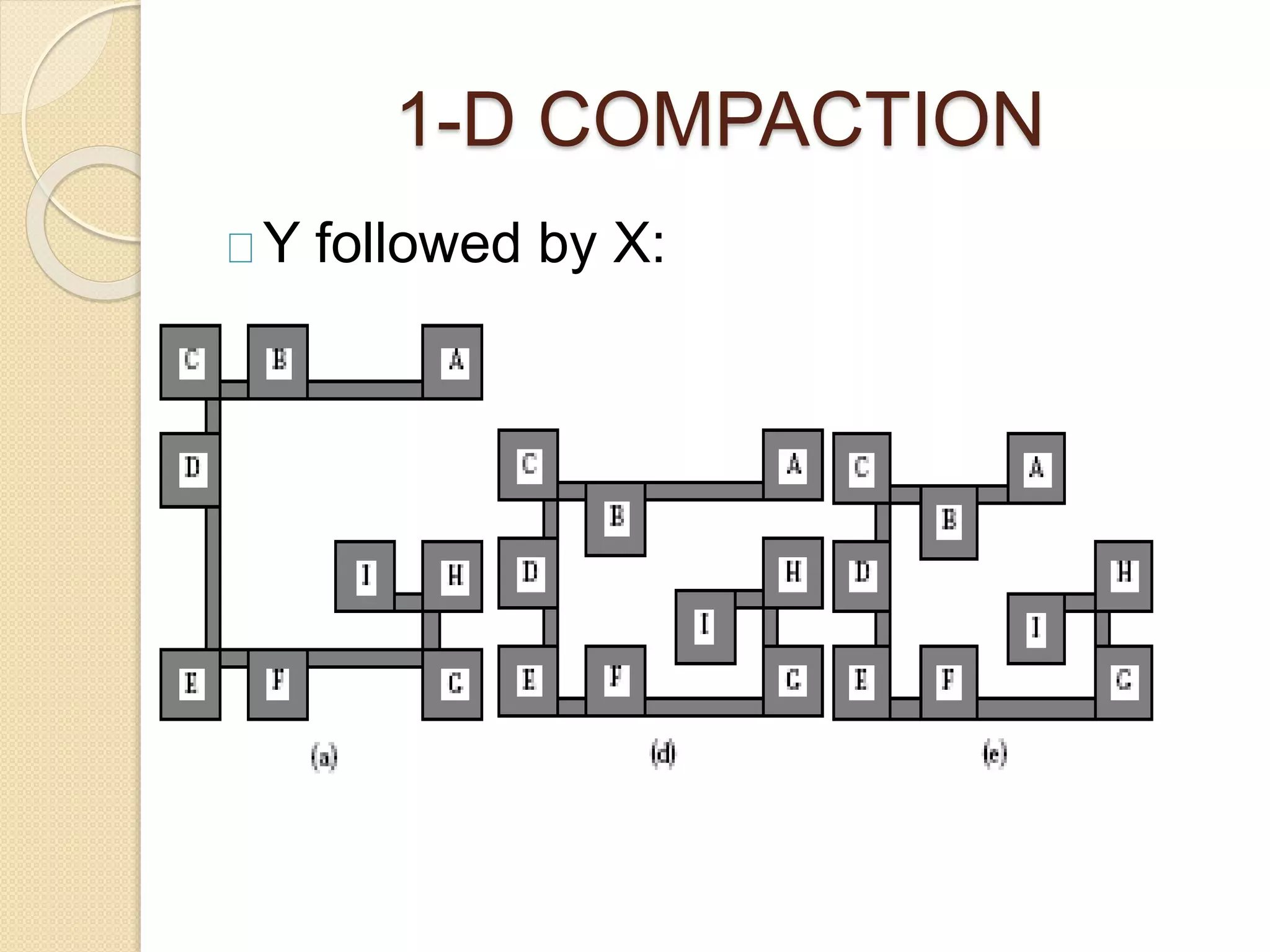
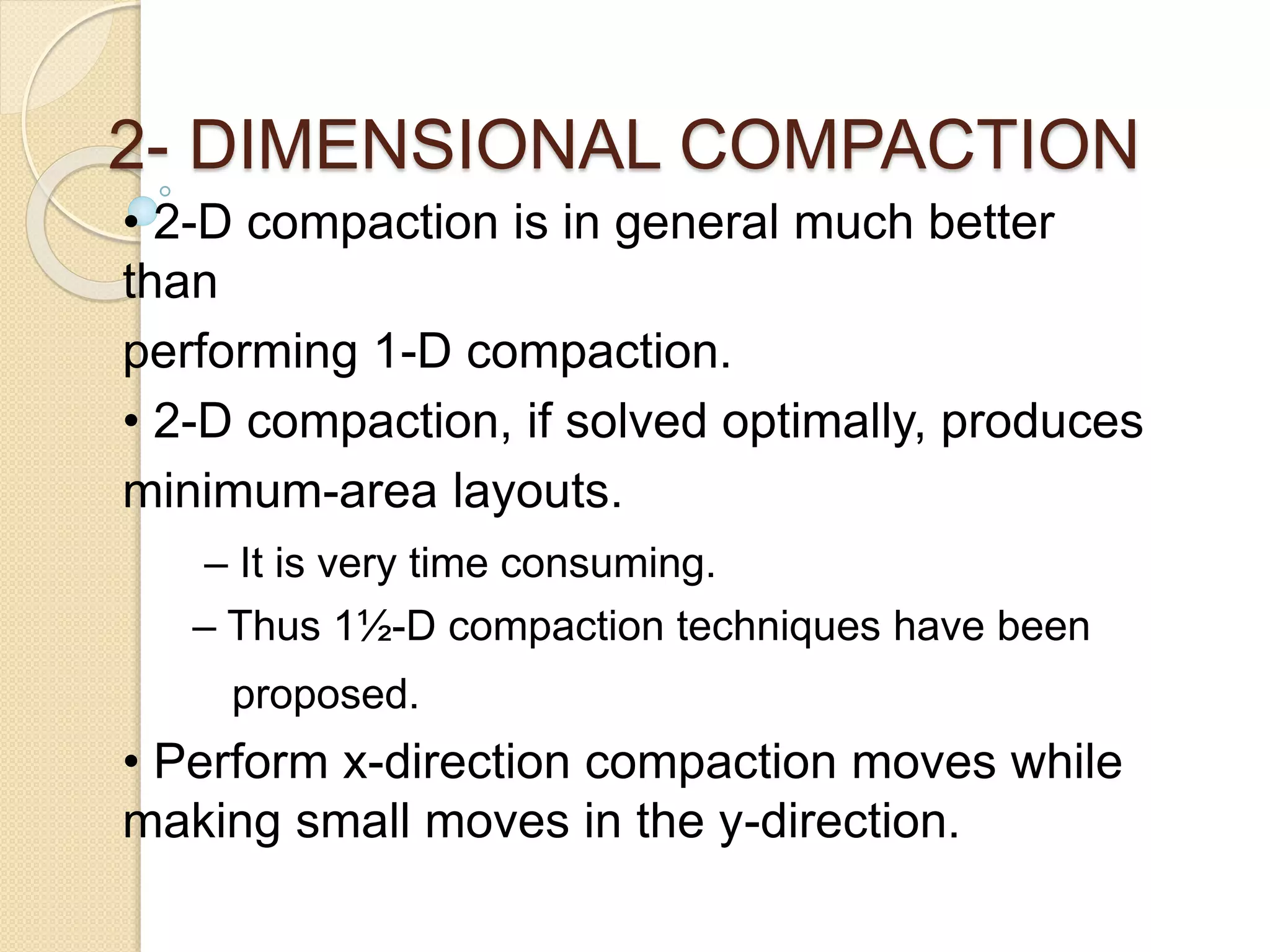
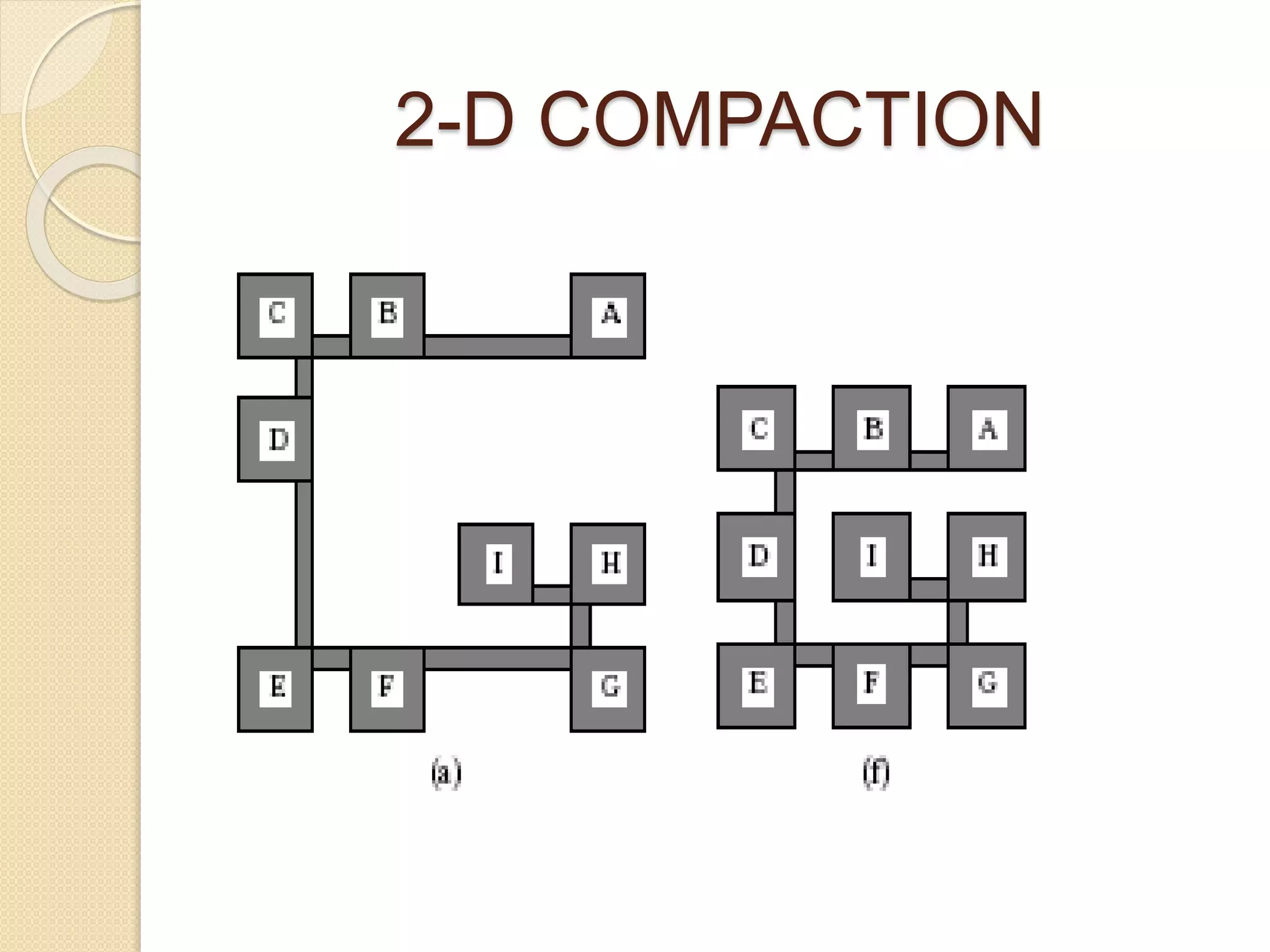
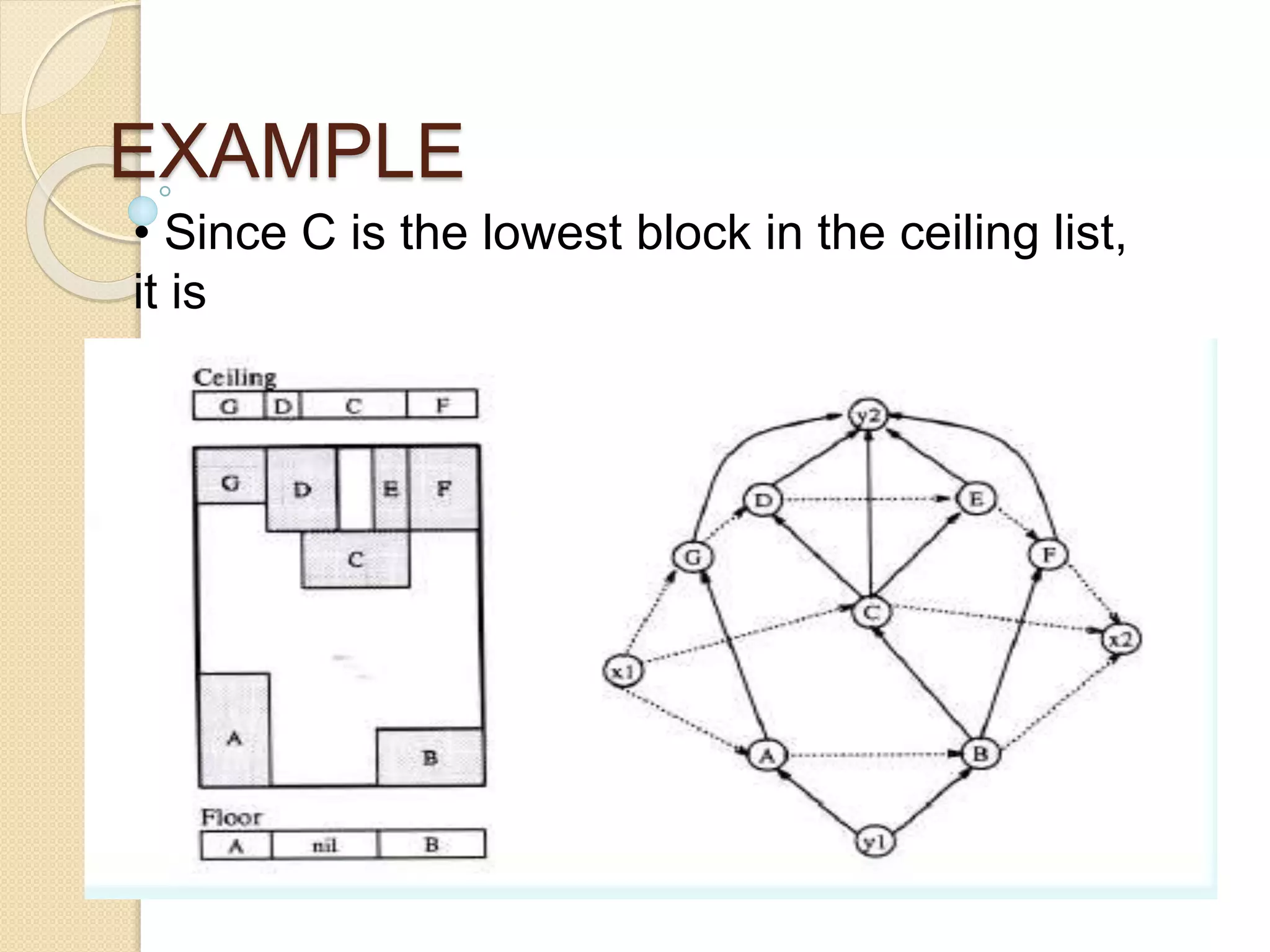
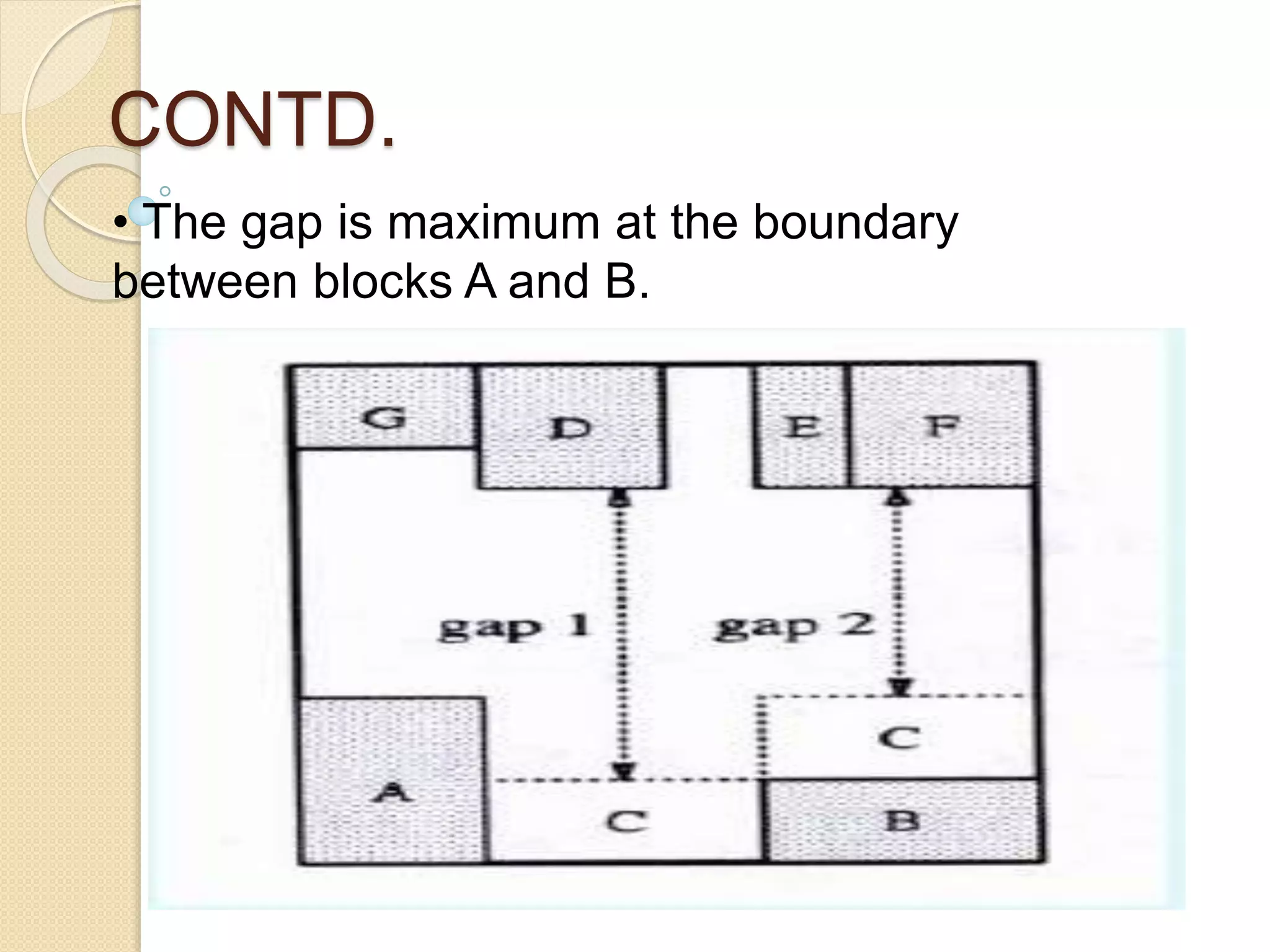
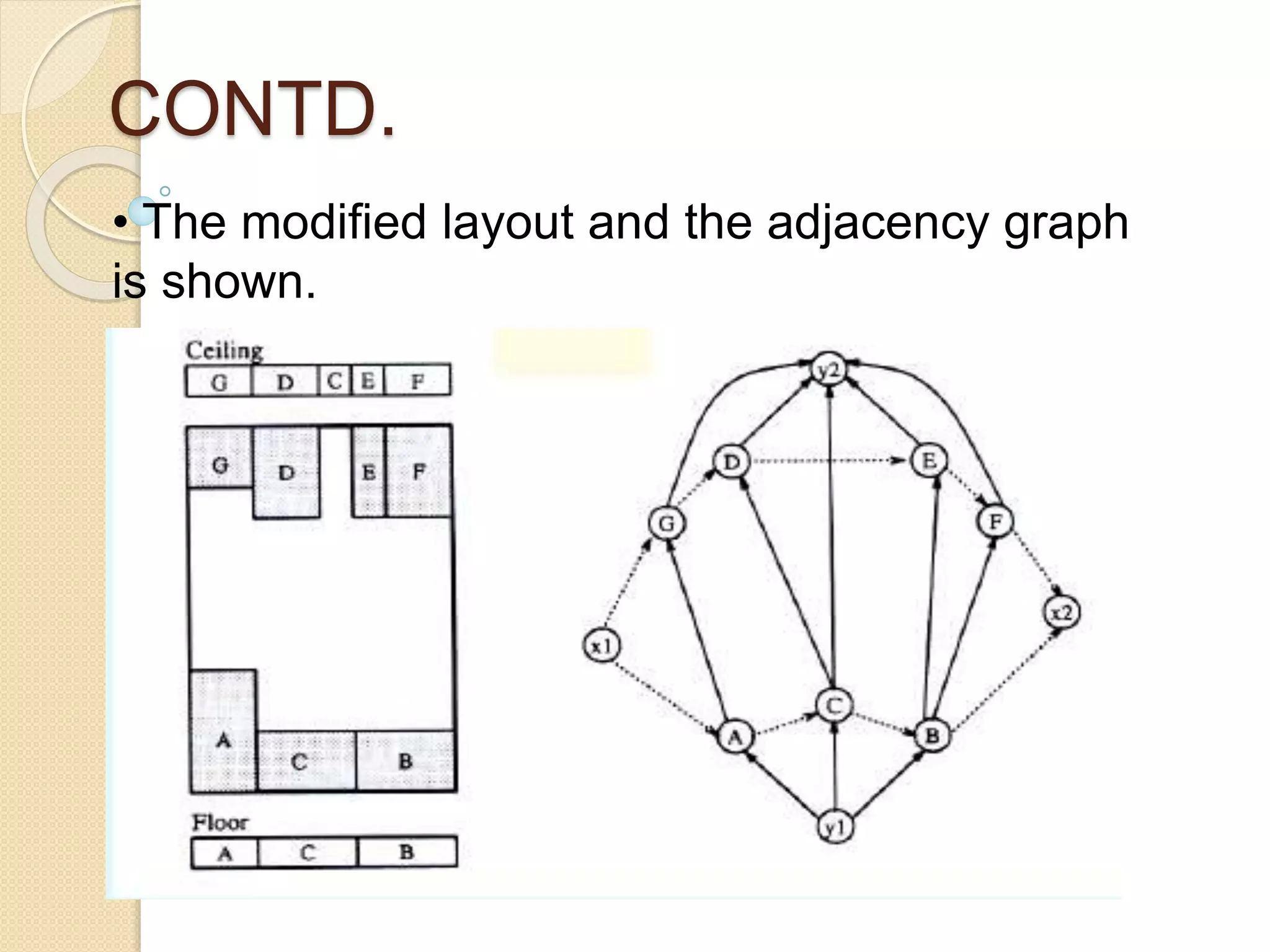
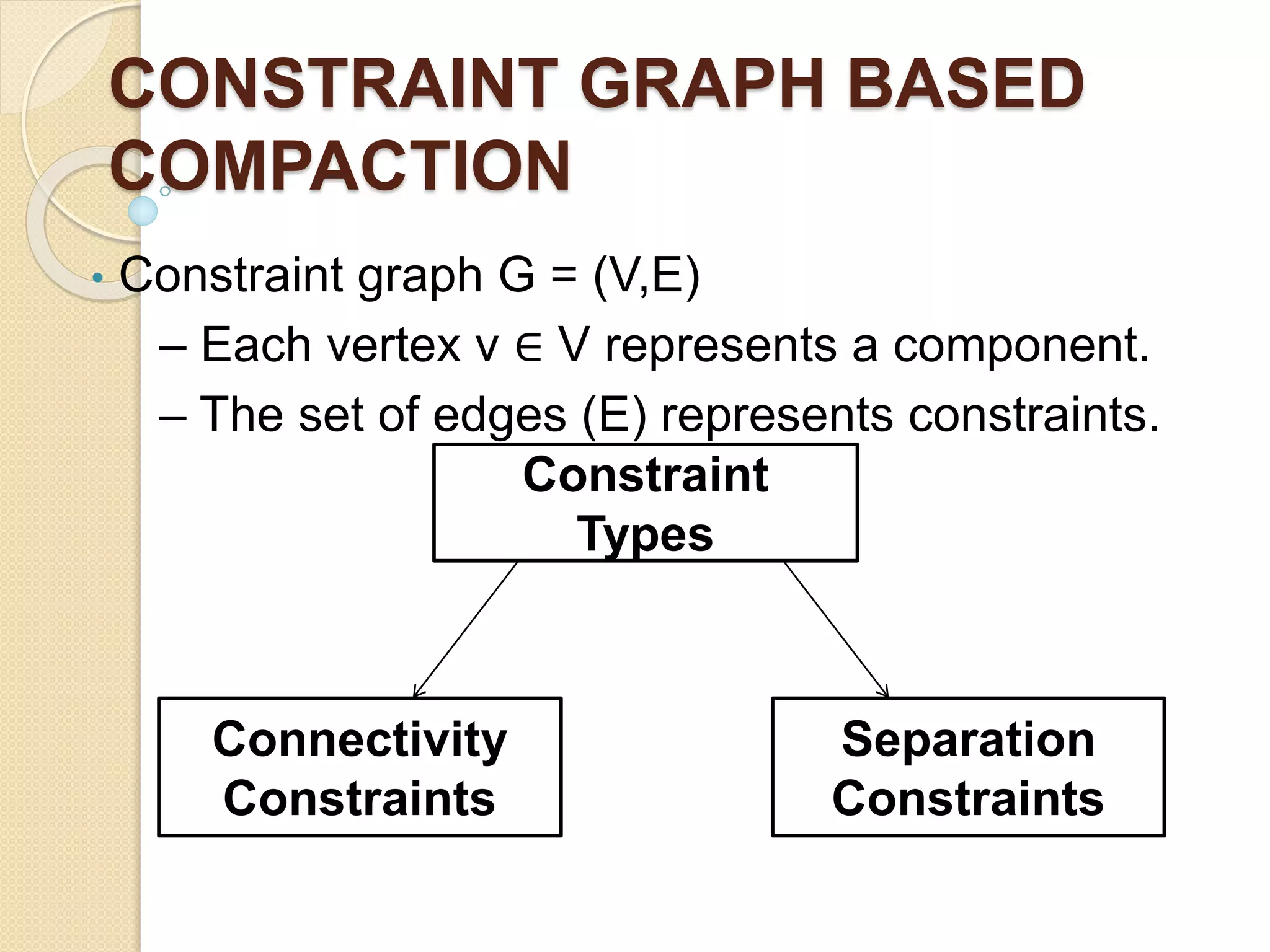
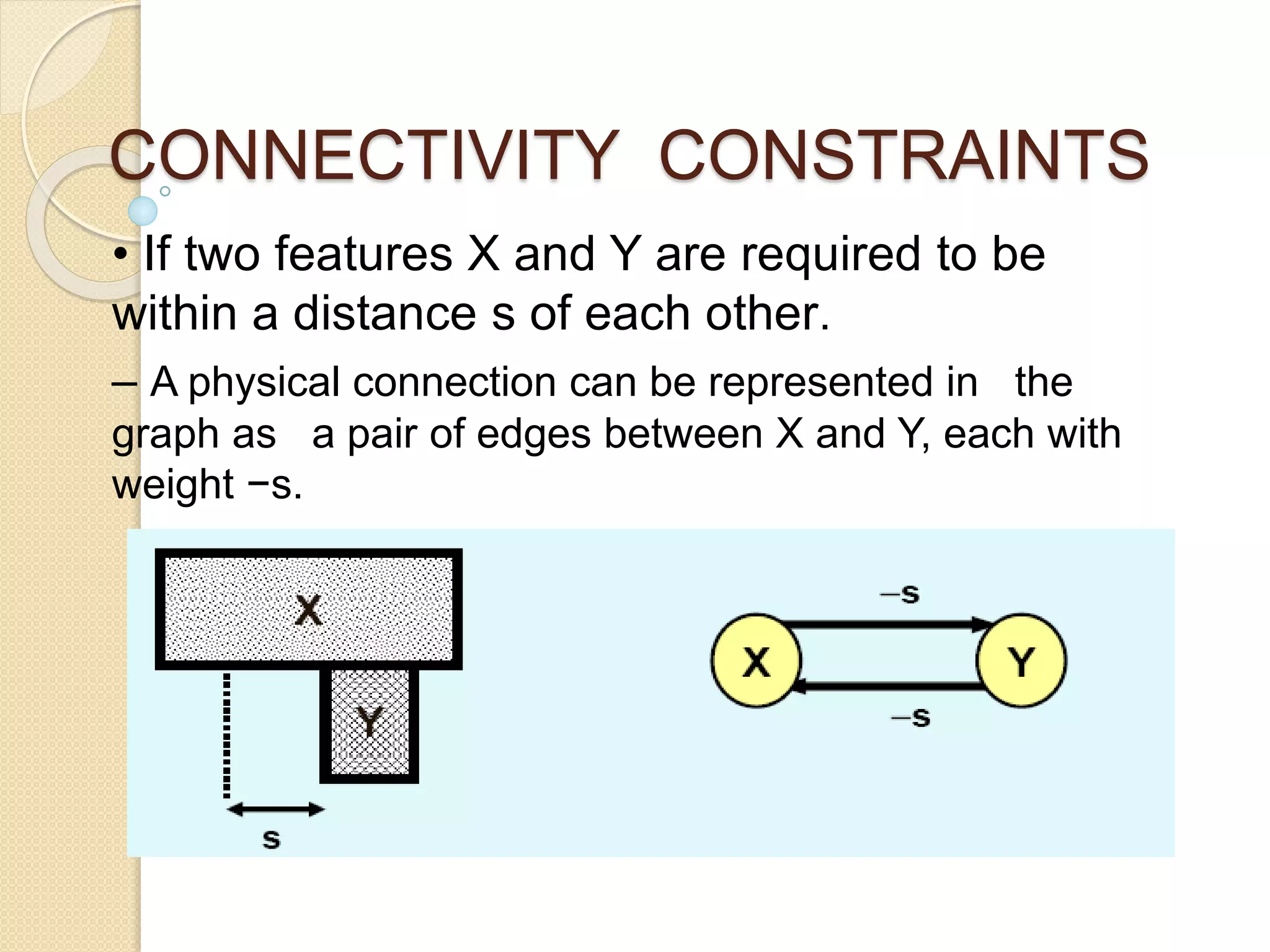
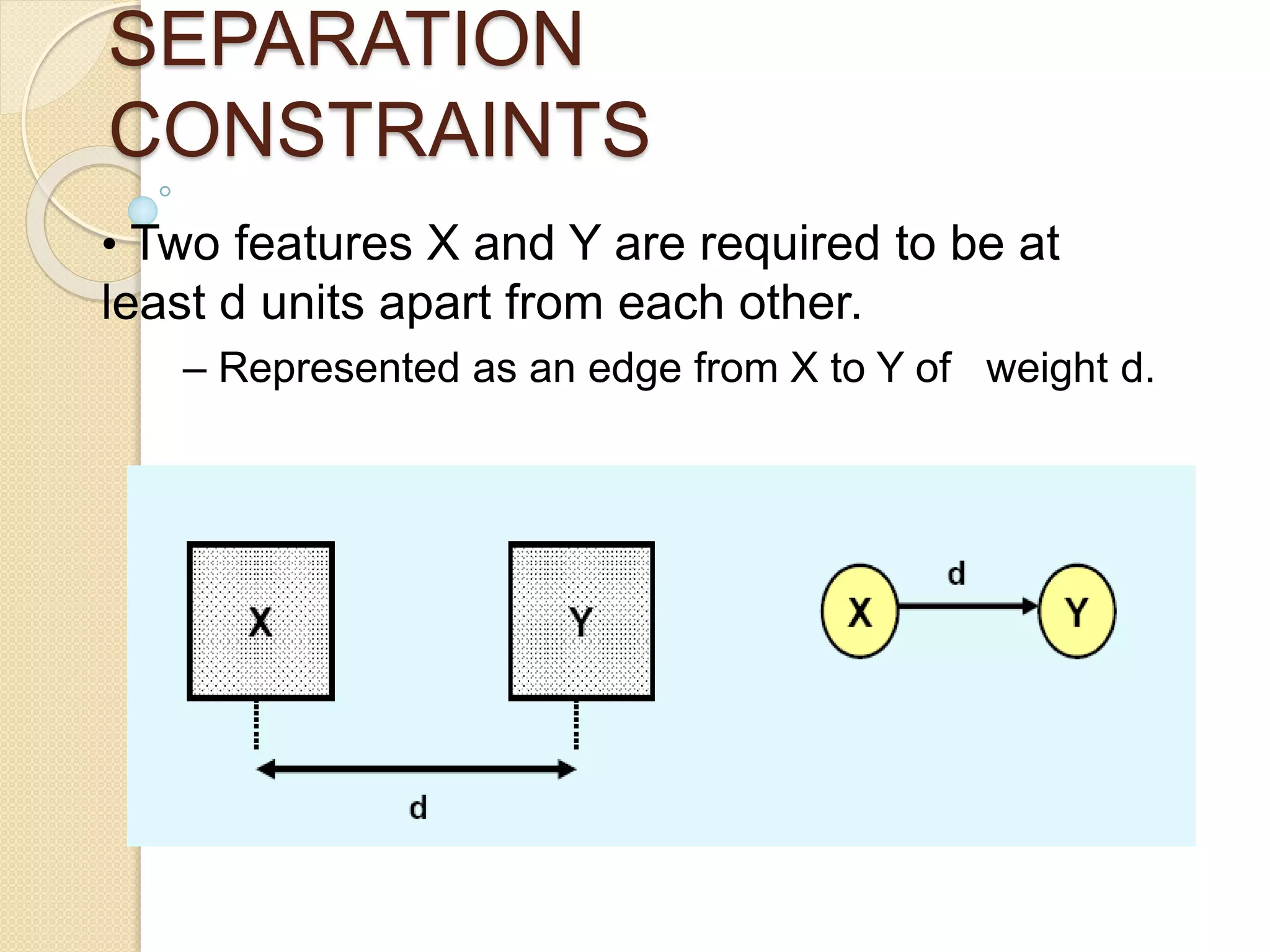
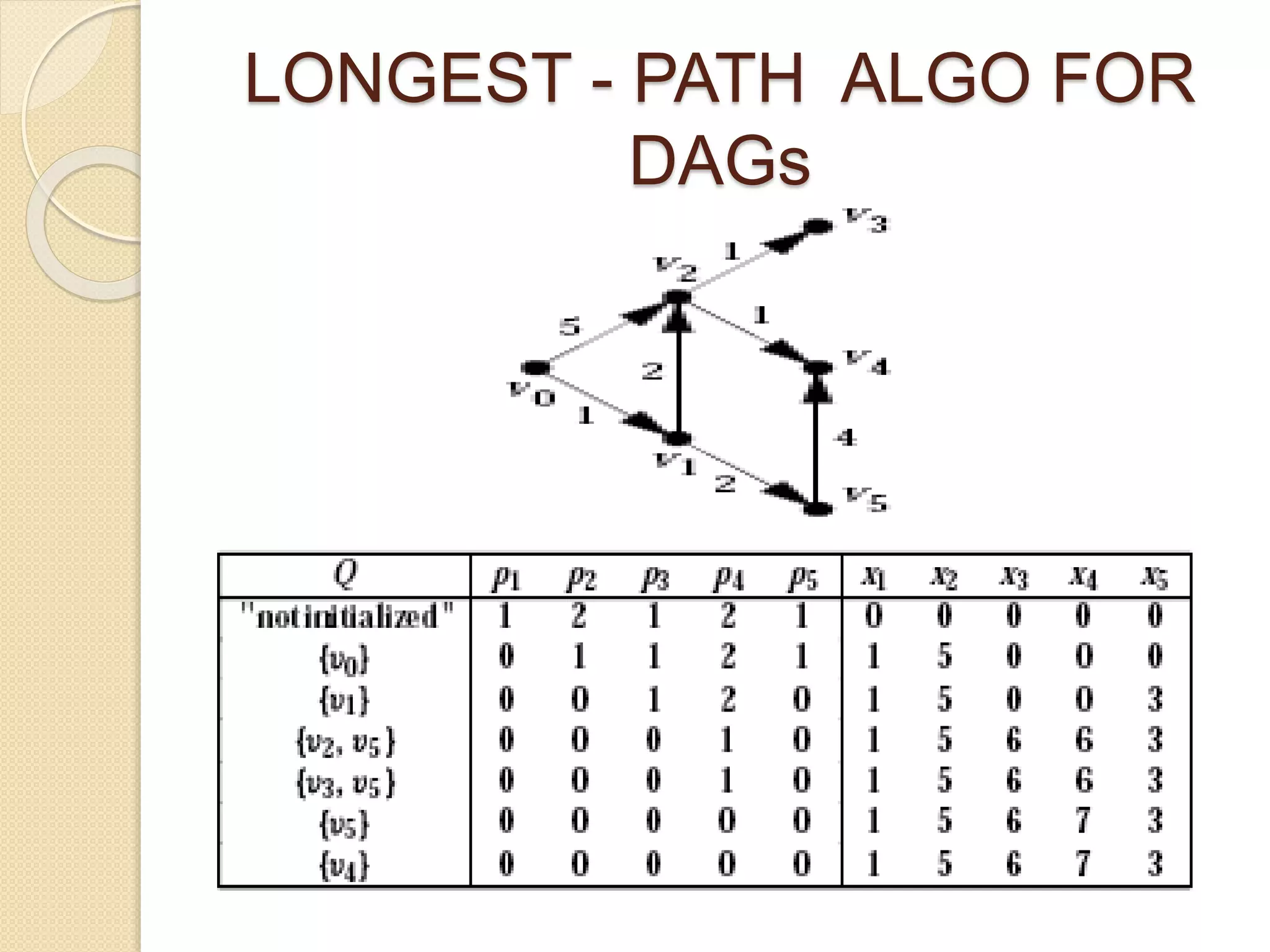
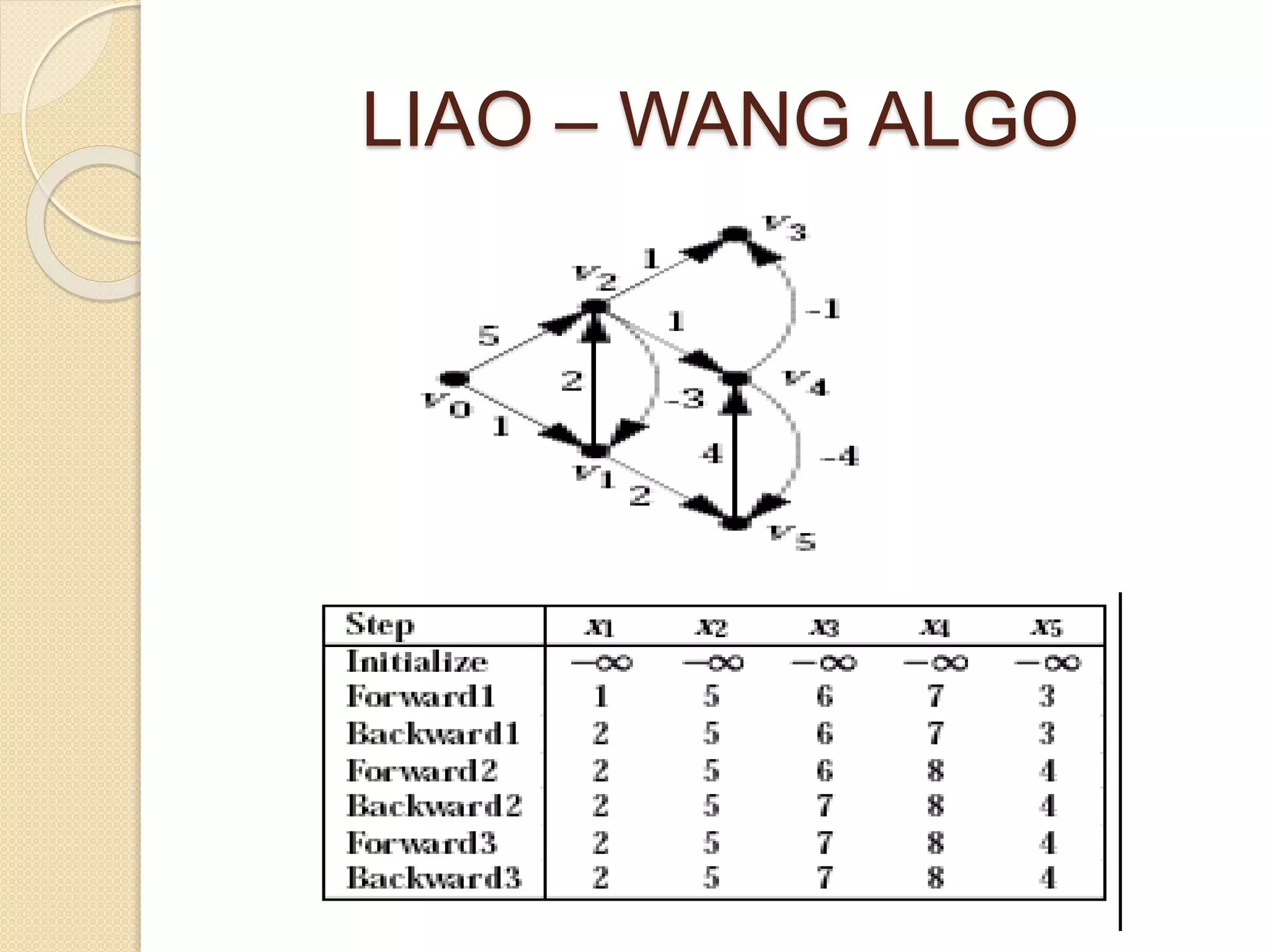

The document discusses layout compaction, which is the operation of minimizing layout area. It classifies compaction algorithms as 1-D, 2-D, or 11⁄2-D. 1-D compaction moves blocks along one dimension only. 2-D compaction produces minimum area layouts but is computationally expensive. 11⁄2-D techniques allow some movement in both dimensions for efficiency. Constraint graph based compaction represents design rules as a weighted graph that can be solved using longest path algorithms. Compaction has applications in area minimization, layout compilation, redesign, and rescaling.





































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)



