1. Definicions prèvies.
2.Sistema de referència.
3. Elements del moviment
4. Magnituds del moviment
5. El moviment rectilini i uniforme (mru).
5.1. Equació de posició
5.2. Gràfiques x-t i v-t.
5.3 Composició amb dos MRU
6. El moviment rectilini uniformement accelerat (mrua).
6.1.Acceleració
6.2. Equacions.
6.3. Gràfiques x-t, v-t i a-t.
6.4 Caiguda lliure
6.5. Composició de moviments: tir parabòlic
7. MCU
2
3.
1. Definicions prèvies
Lamecànica és la part de la física que estudia: la cinemàtica,
l’estàtica i la dinàmica
La cinemàtica és la part de la mecànica que estudia el
moviment sense tenir en compte les causes que el produeixen,
és a dir, sense tenir en compte les forces.
3
4.
Pels següents punts,necessitem definir el que és
una magnitud vectorial i una magnitud escalar.
Magnitud escalar:queda determinada amb un
valor numèric
Magnitud vectorial: per determinar-la necessitem
el valor numéric, la direcció i el sentit.
Un vector és un segment orientat. A més d’ indicar una
quantitat (el mòdul), cal precisar la seva direcció i sentit.
4
5.
Què tenen elsvectors
● la llargària de la fletxa: el mòdul (n. positiu)
● la línia que passa per la fletxa: la direcció (la recta)
● cap on apunti la fletxa: el sentit
5
El moviment...
... es sempre relatiu.
●Només el podem sentir quan aceleram.
●Ningú pot diferenciar si està quiet, o si
s'està movent a velocitat constant en
valor absolut: només en valor relatiu
(respecte a un sistema de referència).
Si quedeu asseguts a la cadira, esteu en repòs o en moviment?
Respecte la Terra esteu en repós però no en respecte al Sol
El mateix passa si viatgeu en un tren, esteu en moviment respecte
el terra però no respecte el tren.
Així, observem que el moviment és realtiu i que per descriure el
moviment necessitem un sistema de referència
8
9.
2. Sistema dereferència
Sistema de referència: cos o conjunt de cossos que feim
servir per referir la posició d’un objecte en moviment.
9
10.
3. Elements delmoviment
L'objecte que es mou: L'anomenarem punt material, sense
considerar el seu volum
Sistema de referència: SR
Sistema de referència cartesià
10
4. Magnituds delmoviment
Posició
Un cop escollit el sistema de referència, podem definir la
posició com la distància entre el cos i el punt de referència
escollit.
S’indiquen amb signe positiu les posicions que es troben a la
dreta o dalt del punt de referència i amb signe negatiu les que
es troben a l’esquerra o baix d’aquest punt
Podem dir que el cos està en
repòs quan no varia la seva
posició respecte al punt de
referència, i en cas contrari,
podem dir que està en
moviment.
12
13.
Poden localitzar unpunt a l'espai mitjançant:
● A partir del de les coordenades cartesianes P (x,y,z)
● A partir d'un vector de posició, que comença a l'origen de
coordenades i acaba en la posició del mòbil en aquell instant.
El vector posició d’un mòbil, és
el vector amb origen en O i extrem
en P0.
13
14.
Desplaçament
Magnitud vectorial( ex:si et diuen que et desplacis 100 m
has de saber en quina direcció i quin sentit)
ens movem, anem d’una posició inicial a una posició final.
Desplaçament= posició final-posició inicial
El vector desplaçament, entre dos
punts P0 i P1 és el vector amb origen en
P0 i extrem en P1
Δr = r1 - r0
14
15.
El vector desplaçament(en
El vector desplaçament (en
vermell) coincideix en direcció
vermell) no coincideix amb la
amb la trajectòria en un
trajectòria.
moviment lineal.
15
16.
Espai recorregut
magnitud escalarque ens indica la longitud de la
trajectòria descrita pel mòbil
∆S: Distància recorreguda pel mòbil sobre
la trajectòria.
Δs ≥ Δ r
Si la trajectòria és una recta
Δs = Δ r
16
Exercicis:
1. Un noifa una volta completa amb bicicleta a una pista circular de
10 m de radi.
a)Quant val el desplaçament?
b)Quina distància mesurada sobre la trajectòria ha recorregut?
2.Un cotxe circula a 100 km/h per una autopista i l’avança un segon
cotxe que circula a 110 km/h.
a)A quina velocitat veura el conductor del primer cotxe passar el
segon cotxe?
b)On situem el sistema de referència quan diem que els cotxes
circulen a 100 km/h i a 110 km/h?
18
19.
Velocitat mitjana ivelocitat instantània
Vector velocitat mitjana
Magnitud vectorial
Indica la relació entre el desplaçament i el temps utilitzat. El
módul de la velocitat indica la rapidesa.
Δr r - r0
Vm = =
Δt t - t 0
19
20.
Vector velocitat instantània
Lavelocitat instantània és la velocitat que porta el mòbil
en cada instant de temps. Quan l’increment de temps és molt petit,
podem dir que la velocitat mitjana i la velociat instantànea és la
mateixa.
→
v = Δr
→
quan Δ t → 0
Δt
20
21.
En el casde moviments amb
trajectòries curvilínies,
el vector velocitat és tangent a la
trejectòria en cada punt.
21
22.
5. Moviment rectiliniuniforme (MRU):
La seva trajectòria és una recta
La velocitat és constant, per tant no hi ha acceleració
5.1 Equació de posició
Δx = x - x 0
Δx = v (t - t 0 )
Δx x - x 0
v = =
Δt t -t0
x= x0 + v (t - t0)
22
L’equació de posiciód’un mòbil ve donada per l’expressió
x= 20-2t
a) Quin significat té aquesta expressió?
b) Quina serà la posició a 10 s?
c) Quina és la seva velocitat?
d)Quin serà el desplaçament en els 6 primers segons?
Important: el signe de la velocitat ens indica
el sentit del moviment. Si té signe negatiu es mou cap
a l’esquerra i amb signe positiu cap a la dreta.
24
25.
Un cotxe surtde la ciutat A cap a B a 60 km/h, l’altre surt de B
cap a A al cap de 2 hores a una velocitat de 90 km/h.
A quina posició i a quan es trobaran?
t=2,53 hores
x=272 km
25
26.
20 km
1. Elegim un un origen del sistema de referència
1. Elegim origen del sistema de referència.
2. 2. elegim un origen de temps
Elegim un origen de temps
x0 =x0 = 0 m
0
m x0 = 0 = 20 000 m
x 20 000 m
v v = 10m/s
= 10 m/s v = -8 m/s
v = -8 m/s
to = 0
to = 0 to =to= 600 s
600
to = 0
3. Plantegem 2.les equacions de moviment de cada corredor
3. Plantegem Elegim un origen de temps cada corredor
les equacions de moviment de
surt a les 11 en punt surt a les 11 i 10
x= x0 + v (t - t0)
x = 10 t x = 20 000 – 8 (t-600)
10 t = 20 000 – 8 (t-600) 10 t + 8 t = 20 000 + 4800 18 t = 24 800 t = 24 800/18 = 1377,8 s
4. La posició a la que es troben és 1377,8 s = 23 min
4. La posició a la que es troben és
x = 10 t = 10 · 1377,8 = 13 778 m = 13,8 km de Sabadell A les 11 h 23 min
26
27.
5.2 Gràfics x-t,v-t
Les gràfiques que obtindriem
en aquest moviment serien les
que es mostren , la gràfica de la
posició seria una recta amb
pendent positiva en el cas que el
mòbil es mogués cap a la dreta, en
cas contrari la pendent seria
negativa.
La gràfica x-t és una línia recta que talla a l eix d
ordenades en la posició inicial (x0).
La gràfica v-t és una línia horitzontal, paral·lela
a l eix de abscisses, que talla a l eix d ordenades
en el valor de la velocitat del mòbil.
27
28.
5.3 Composició demoviments
Una barca que pretén creuar un riu perpendicularment a la riba.
El moviment real de la barca està compost per:
MRU perpendicular a la riba, a causa de l’esforç del remer
MRU paral.lel a la riba, degut al corrent del riu
28
29.
vector velocitat
→ → →
v = vx i + vy j
v = v2 + v2
x y
vector posició
29
30.
6. Moviment rectiliniuniformement accelerat (MRUA):
El moviment rectilini uniformement accelerat (MRUA) és un moviment on la
trajectòria és una línea recta i l’ acceleració és constant.
6.1 Acceleració
Vector acceleració mitjana: quocient entre el vector velocitat instantània i
l’interval de temps transcorregut entre dos punts de la trajectòria.
→ → →
→
am Δv v -v
= = t -t
2 1
Δt 2 1
→ →
v
A 1
A v
Y Y
1
• •
→ →
v 2 Δv
→
r 1
•B →
v 2
→
r 2
X X
30
31.
Vector acceleració instantània:és el vector al qual tendeix el vector acceleració
mitjana quan l’interval de temps tendeix a zero. ∆t 0 (acceleració en un instant
determinat)
→ →
a = Δv
→ δv
quan Δ t → 0
→
a=
Δt δt
Components intrínseques de l’acceleració
Un vector, com el de la velocitat, no experimenta cap variació si se’l desplaça
paral·lelament,però sí que experimenta variació si es modifica el seu mòdul i/o la seva
direcció. Per tant,direm que el vector velocitat ha sofert una modificació al llarg d’un
temps, si ha canviat la seva grandària i/o la seva direcció i sentit.
És a dir,Quan un conductor d’un automòbil agafa un revolt, el vector velocitat canvia de
direcció en cada instant, i quan prem l’accelerador, canvia el mòdul de la velocitat. En tot
dos casos, si canvia la direcció o el mòdul de la velocitat, hi ha una acceleració.
31
32.
A qualsevol puntde la trajectòria se li pot associar un sistema de referència format per
un eix tangent a la trajectòria, i un altre de perpendicular a la trajectòria.
El vector acceleració instantània es pot
descompondre, en aquest sistema de referència, en dues
components intrínseques: una tangencial i una
normal.
a = at + an = at .ut + an.un
→
un Vector unitari de direcció normal a a tarjectòria
→
ut Vector unitari de direcció tangent a a tarjectòria
a = a2 + an
t
2
vector unitari: el seu mòdul és la unitat
32
33.
Un mòbil téacceleració si varia com a mínim algun factor (mòdul o direcció) del
vector velocitat
Component tangencial, at: expressa la variació del mòdul de la velocitat. El seu valor
és:
Δv pot ser positiva o negativa
at =
Δt
33
34.
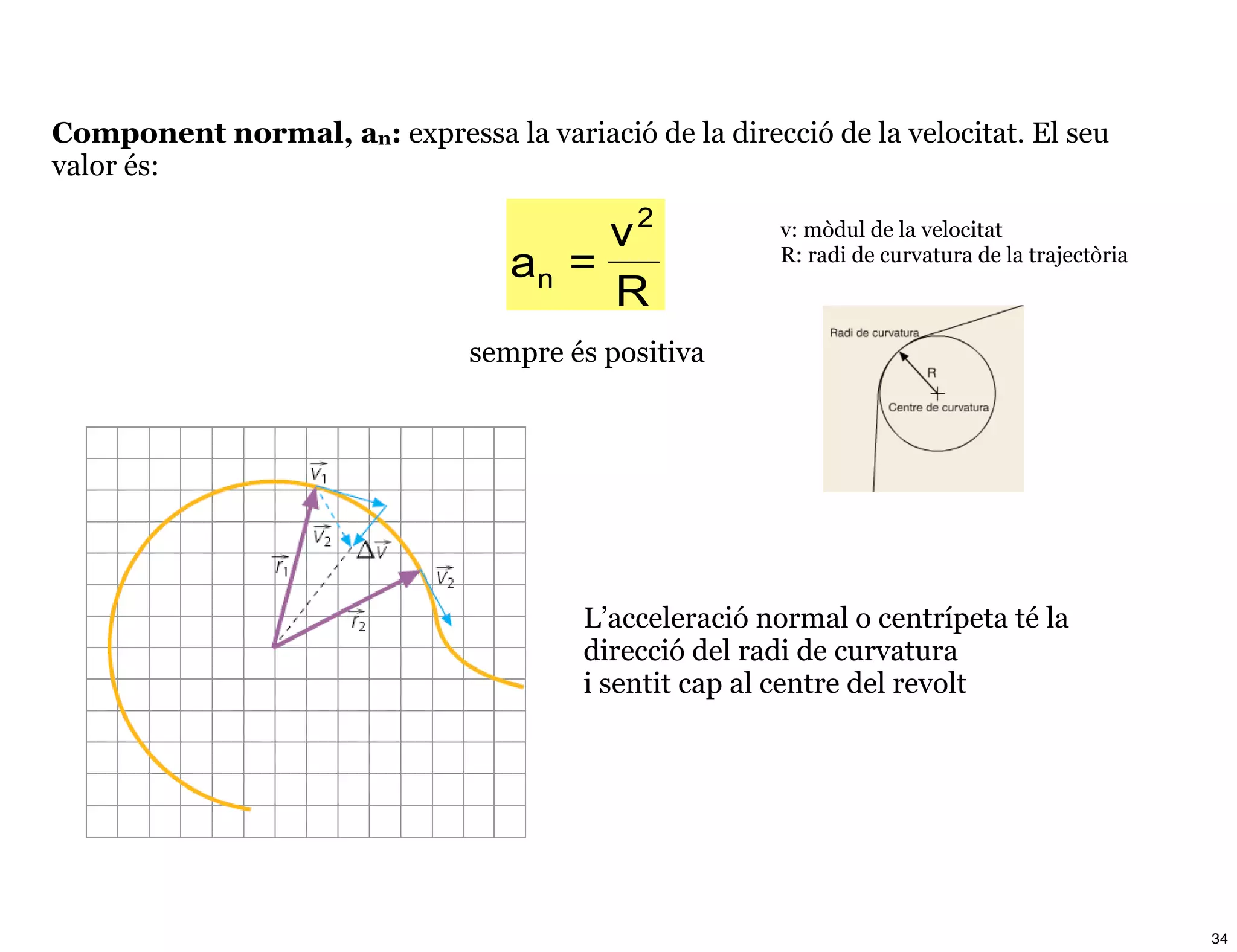
Component normal, an:expressa la variació de la direcció de la velocitat. El seu
valor és:
2
v v: mòdul de la velocitat
an = R: radi de curvatura de la trajectòria
R
sempre és positiva
L’acceleració normal o centrípeta té la
direcció del radi de curvatura
i sentit cap al centre del revolt
34
35.
En la figurapodeu veure el cas d’un mòbil que el seu vector velocitat tan
sols experimenta variació en la direcció del vector, però no en el seu mòdul.
En aquest cas, existeix acceleració i rep el nom d’acceleració normal o
centrípeta.
35
36.
Per tant, perun mòbil que experimenta una variació en el mòdul i en la direcció
tenim acceleració normal i tangencial. Per tant si feim la suma d’aquest vectors per
qualsevol punt de la trajectòria, obtenim:
36
37.
Per trobar lescomponents tangencial i centrípeta
de l’acceleració hem de
buscar l’anle que fomen els vector velocitat i
acceleració. Per trobar aquest
angle utilitzarem el producte escalar dels dos
vectors
Per trobar les components de l’acceleració hem d’agafar uns nous eixos de
manera que l’eix “X” vagi en la mateixa direcció que el vector velocitat.
37
6.2 Equacions delMRUA
A més de les equacions que hem descrit, en el MRUA podem obtenir una equació a on
no hi apareix el temps com a variable.
aïllant el temps
substituint l’expressió del temps
39