VECTORSVECTORS
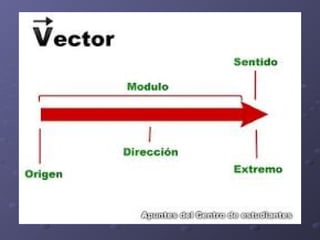
VECTOR: És unsegment orientat que
es dibuixa mitjançant una fletxa.
Els elements d’un vector són:
- Punt d’aplicació: punt on comença.
- Mòdul: la longitud del vector. Es
representa o per v.
- Direcció: la recta que conté el vector.
- Sentit: indica cap a on apunta la fletxa.
5.
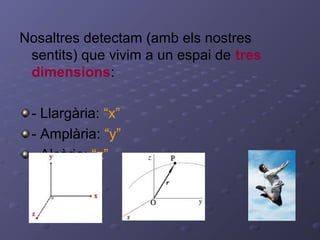
Nosaltres detectam (ambels nostres
sentits) que vivim a un espai de tres
dimensions:
- Llargària: “x”
- Amplària: “y”
- Alçària: “z”
6.
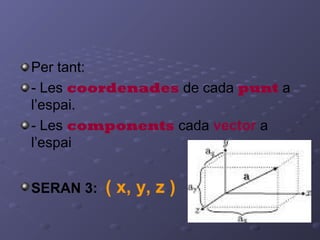
Per tant:
- Lescoordenades de cada punt a
l’espai.
- Les components cada vector a
l’espai
SERAN 3: ( x, y, z )
7.
Els vectors esrepresentan a l’espai tenint
com a referència una:
BASE ORTONORMALBASE ORTONORMAL
(Te’n recordes què significa?)(Te’n recordes què significa?)
- Els tres eixos que representen les tres
dimensions de l’espai són perpendiculars
entre si.
8.
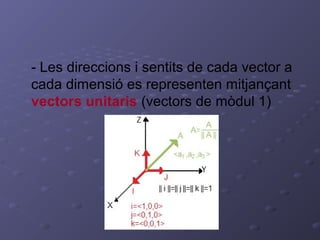
- Les direccionsi sentits de cada vector a
cada dimensió es representen mitjançant
vectors unitaris (vectors de mòdul 1)
ELS VECTORS ELSELSVECTORS ELS
PODEM:PODEM:
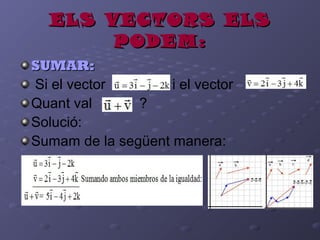
SUMAR:SUMAR:
Si el vector i el vector
Quant val ?
Solució:
Sumam de la següent manera:
11.
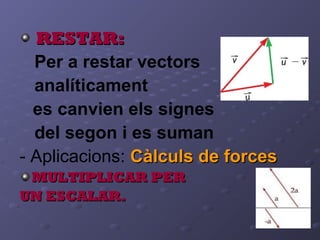
RESTAR:RESTAR:
Per a restarvectors
analíticament
es canvien els signes
del segon i es suman
- Aplicacions: Càlculs de forcesCàlculs de forces
MULTIPLICAR PERMULTIPLICAR PER
UN ESCALAR.UN ESCALAR.
12.
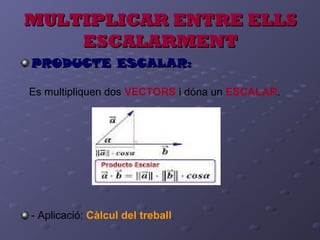
MULTIPLICAR ENTRE ELLSMULTIPLICARENTRE ELLS
ESCALARMENTESCALARMENT
PRODUCTE ESCALAR:PRODUCTE ESCALAR:
Es multipliquen dos VECTORS i dóna un ESCALAR.
- Aplicació: Càlcul del treball.
13.
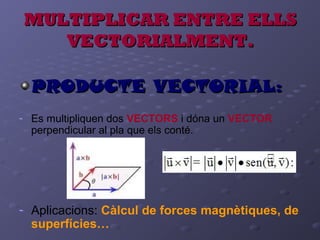
MULTIPLICAR ENTRE ELLSMULTIPLICARENTRE ELLS
VECTORIALMENT.VECTORIALMENT.
PRODUCTE VECTORIAL:PRODUCTE VECTORIAL:
- Es multipliquen dos VECTORS i dóna un VECTOR
perpendicular al pla que els conté.
- Aplicacions: Càlcul de forces magnètiques, de
superfícies…
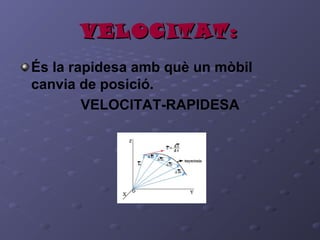
És la partde la física que
estudia el moviment dels
cossos sense tenir en
compte les causes que el
produeix.
19.
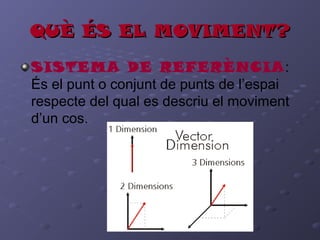
QUÈ ÉS ELMOVIMENT?QUÈ ÉS EL MOVIMENT?
SISTEMA DE REFERÈNCIA:
És el punt o conjunt de punts de l’espai
respecte del qual es descriu el moviment
d’un cos.
20.
POSICIÓ: Lloc ones troba un cos en un
moment determinat.
Un cos està en MOVIMENT si canvia
de posició respecte del sistema de
referència.
Un cos està en REPÒS si no canvia de
posició respecte del sistema de
referencia.
21.
A partir d’araqualsevol cos sigui capaç
de desplaçar-se, rebrà el nom de
MÒBIL.
I el considerarem com si fos un PUNT
MATERIAL, és a dir, com si no
tingués dimensions.
Ex: persona, cotxe, moto, avió…
22.
TIPUS DE MOVIMENTSTIPUSDE MOVIMENTS
MOVIMENT DE TRANSLACIÓ: El
cos canvia de posició però no modifica la
orientació espacial.
MOVIMENT DE ROTACIÓ: Un punt
o més del cos romanen fixos i els altres hi
giren al voltant. El cos no canvia de lloc.
23.
La TRAJECTÒRIA quesegueix un
mòbil és la línia formada pels
successius punts que ocupa un mòbil
en el seu moviment.
24.
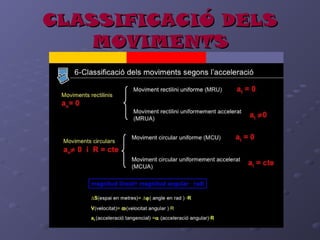
CLASSIFICACIÓ DELSCLASSIFICACIÓ DELS
MOVIMENTSSEGONS ELMOVIMENTS SEGONS EL
TIPUS DE TRAJECTÒRIA:TIPUS DE TRAJECTÒRIA:
Moviment RECTILINIMoviment RECTILINI: trajectòria recta.
Ex: Moviment d’un ascensor
Carrera de 50 m
25.
- Parabòlic: Paràbola
Ex:Llancament d’un balon amb
inclinació, d’un canó…
- Quassevol corba:
Ex: un cotxe que circula per una
carretera
26.
La POSICIÓ d’unmòbil en un
instant determinat és el punt de
l’espai que ocupa en aquest instant.
La posició es fixa mitjançant un
vector de posició que té el seu
punt d’aplicació a l’origen del sistema
de referència i acaba en la posició en
què es troba el mòbil
TIPUS DE COMPOSICIÓTIPUSDE COMPOSICIÓ
DE MOVIMENTSDE MOVIMENTS
SENZILLSSENZILLS
COMPOSICIÓ DE DOS MRU
COMPOSICIÓ DE MRU I MRUA :
MOVIMENT PARABÒLIC O TIR
OBLIC
ABAST I ALTURA MÀXIMA
És laÉs lapart de la Física que explica lesque explica les
causes del moviment..
LesLes CAUSES que provoquen unque provoquen un
moviment són lesmoviment són les FORCES..
NEWTONNEWTON va proposar un sistema deva proposar un sistema de
vectorsvectors per a simbolitzar les forces.per a simbolitzar les forces.
38.
- Va proposarl’existènciaVa proposar l’existència
dede forces fictíciesforces fictícies perquèperquè
els càlculs quadrassin.els càlculs quadrassin.
39.
LLEIS DE NEWTONLLEISDE NEWTON
1a LLEI O PRINCIPI D’INÈRCIA1a LLEI O PRINCIPI D’INÈRCIA
Tot cos, en repòs o en moviment rectiliniTot cos, en repòs o en moviment rectilini
uniforme, continuarà en el seu estat si launiforme, continuarà en el seu estat si la
resultant de les forces que actuen sobreresultant de les forces que actuen sobre
ell és zero.ell és zero.
40.
2ª LLEI DENEWTON O2ª LLEI DE NEWTON O
PRINCIPI FONAMENTALPRINCIPI FONAMENTAL
Si la resultant de les forces que actuenSi la resultant de les forces que actuen
sobre un cos no és zero, el cossobre un cos no és zero, el cos
experimenta un canvi en l’estat de repòs oexperimenta un canvi en l’estat de repòs o
de moviment en què es troba. És a dir,de moviment en què es troba. És a dir,
experimenta una acceleració.experimenta una acceleració.
41.
3ª LLEI DENEWTON O3ª LLEI DE NEWTON O
D’ACCIÓ I REACCIÓD’ACCIÓ I REACCIÓ
Si un cos exerceix una força sobre unSi un cos exerceix una força sobre un
altre, el segon fa una força sobre elaltre, el segon fa una força sobre el
primer, del mateix mòdul i direcció però deprimer, del mateix mòdul i direcció però de
sentit contrari i diferent punt d’aplicació.sentit contrari i diferent punt d’aplicació.
El treball realitzatper
una força es pot
convertir en energia i
viceverça.
WW ↔↔ EE
44.
Rosa Mª RodríguezGarcía-CaroRosa Mª Rodríguez García-Caro
Professora de física i químicaProfessora de física i química
IES ALCÚDIAIES ALCÚDIA
ALCÚDIA (MALLORCA)ALCÚDIA (MALLORCA)