Download as PDF, PPTX
![Who
• Charlie
Miller
[Security
Engineer]
|Twi2er|
• Chris
Valasek
[Director
of
Security
Intelligence]
|
IOAc8ve|](https://image.slidesharecdn.com/chrisvalasekenpub-140312041915-phpapp01/75/The-Current-State-of-Automotive-Security-by-Chris-Valasek-3-2048.jpg)








![Frequency
of
CAN
messages
• Frequency
of
messages
from
IDs
does
not
have
much
devia/on
• Comparison
of
messages
from
the
start
of
a
capture
and
in
random
loca/ons
within
the
same
capture
Hit
Counts:
Primary[03A9]
=>
9
|
Secondary[03A9]
=>
5
Hit
Counts:
Primary[0255]
=>
166
|
Secondary[0255]
=>
119
Hit
Counts:
Primary[0230]
=>
991
|
Secondary[0230]
=>
1011
Hit
Counts:
Primary[0250]
=>
168
|
Secondary[0250]
=>
209
Hit
Counts:
Primary[03C4]
=>
41
|
Secondary[03C4]
=>
46
Hit
Counts:
Primary[0340]
=>
80
|
Secondary[0340]
=>
82
Hit
Counts:
Primary[0422]
=>
83
|
Secondary[0422]
=>
36
Hit
Counts:
Primary[0423]
=>
17
|
Secondary[0423]
=>
6
Hit
Counts:
Primary[0420]
=>
83
|
Secondary[0420]
=>
47
Hit
Counts:
Primary[0200]
=>
496
|
Secondary[0200]
=>
630](https://image.slidesharecdn.com/chrisvalasekenpub-140312041915-phpapp01/75/The-Current-State-of-Automotive-Security-by-Chris-Valasek-61-2048.jpg)

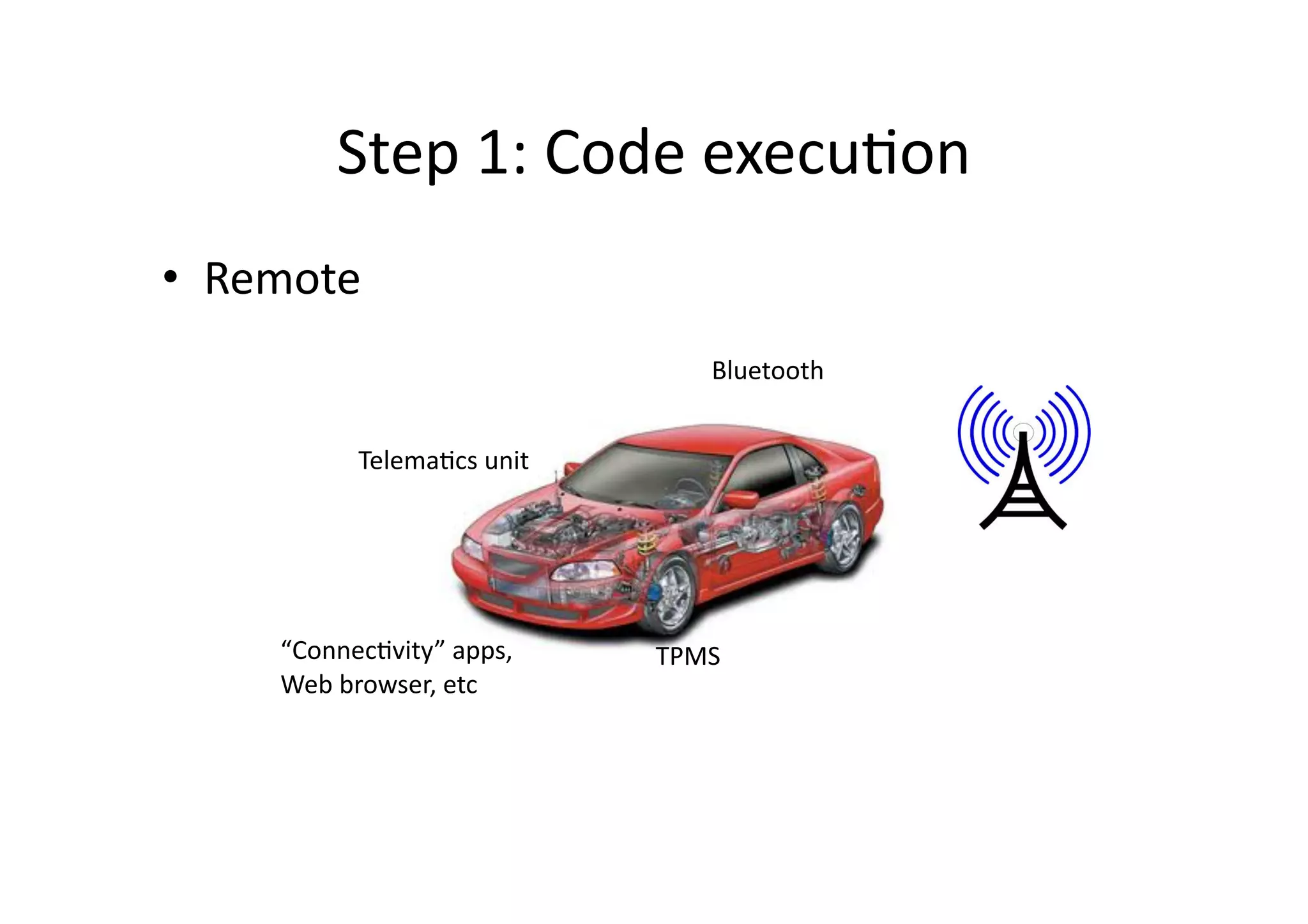
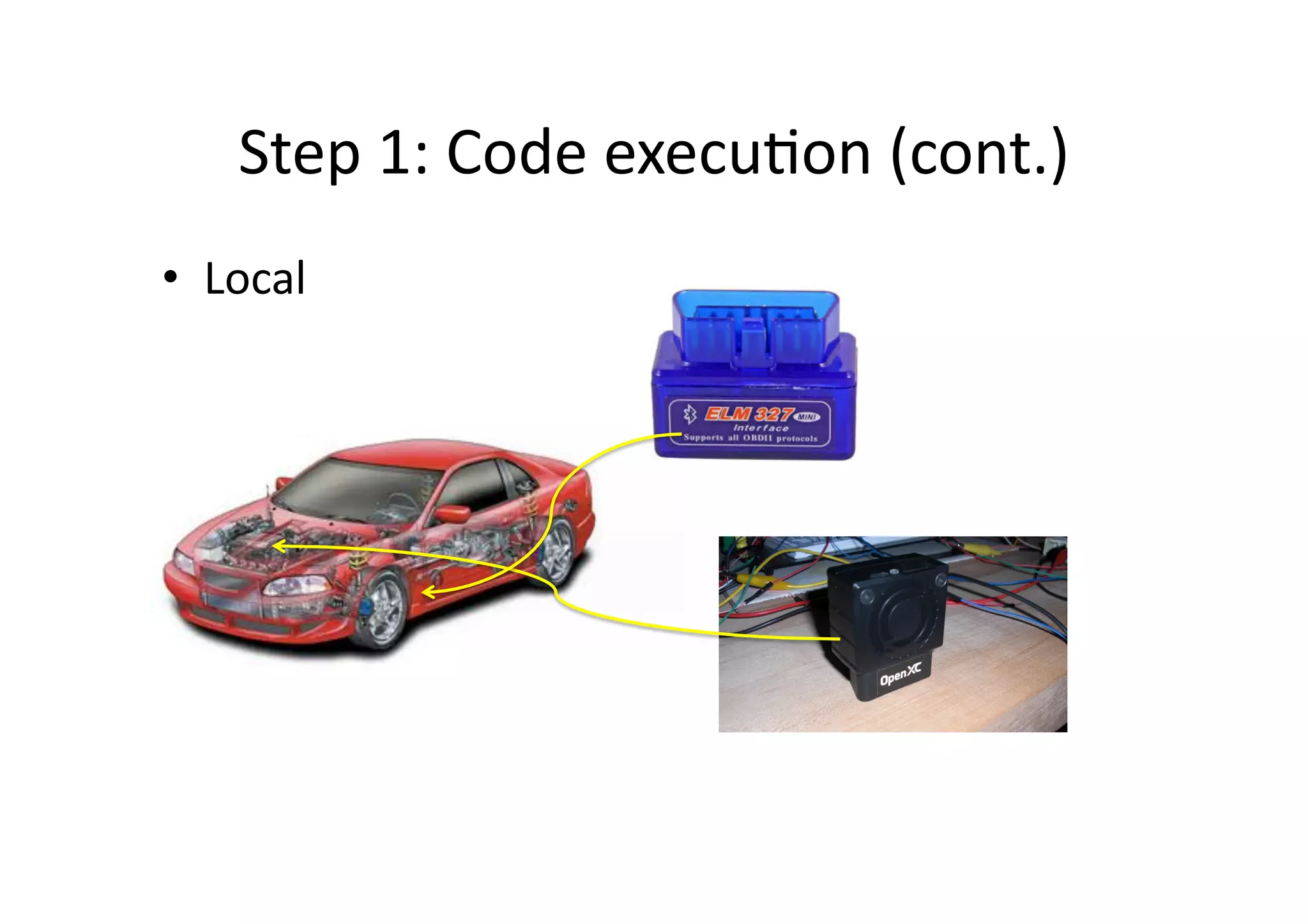
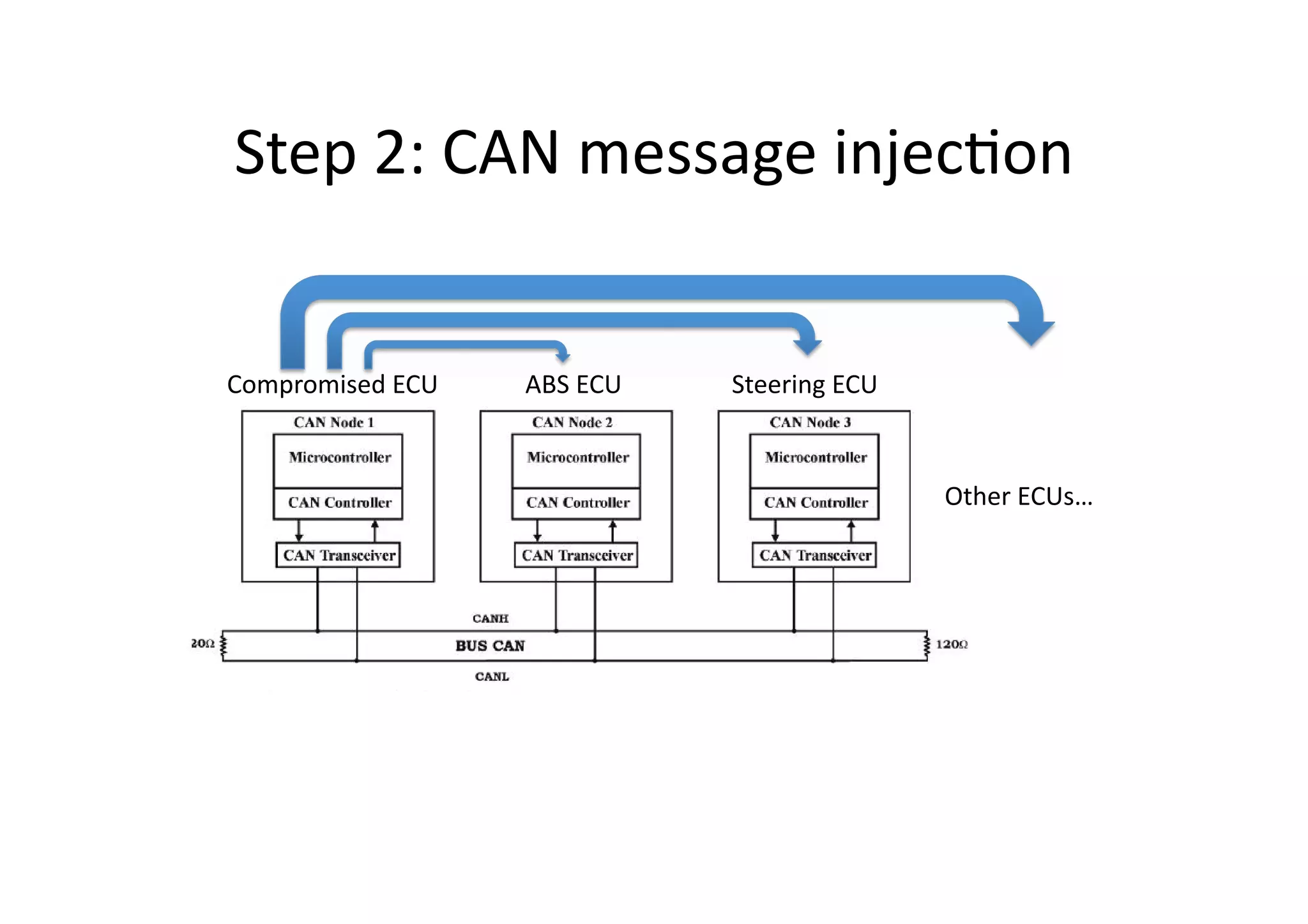
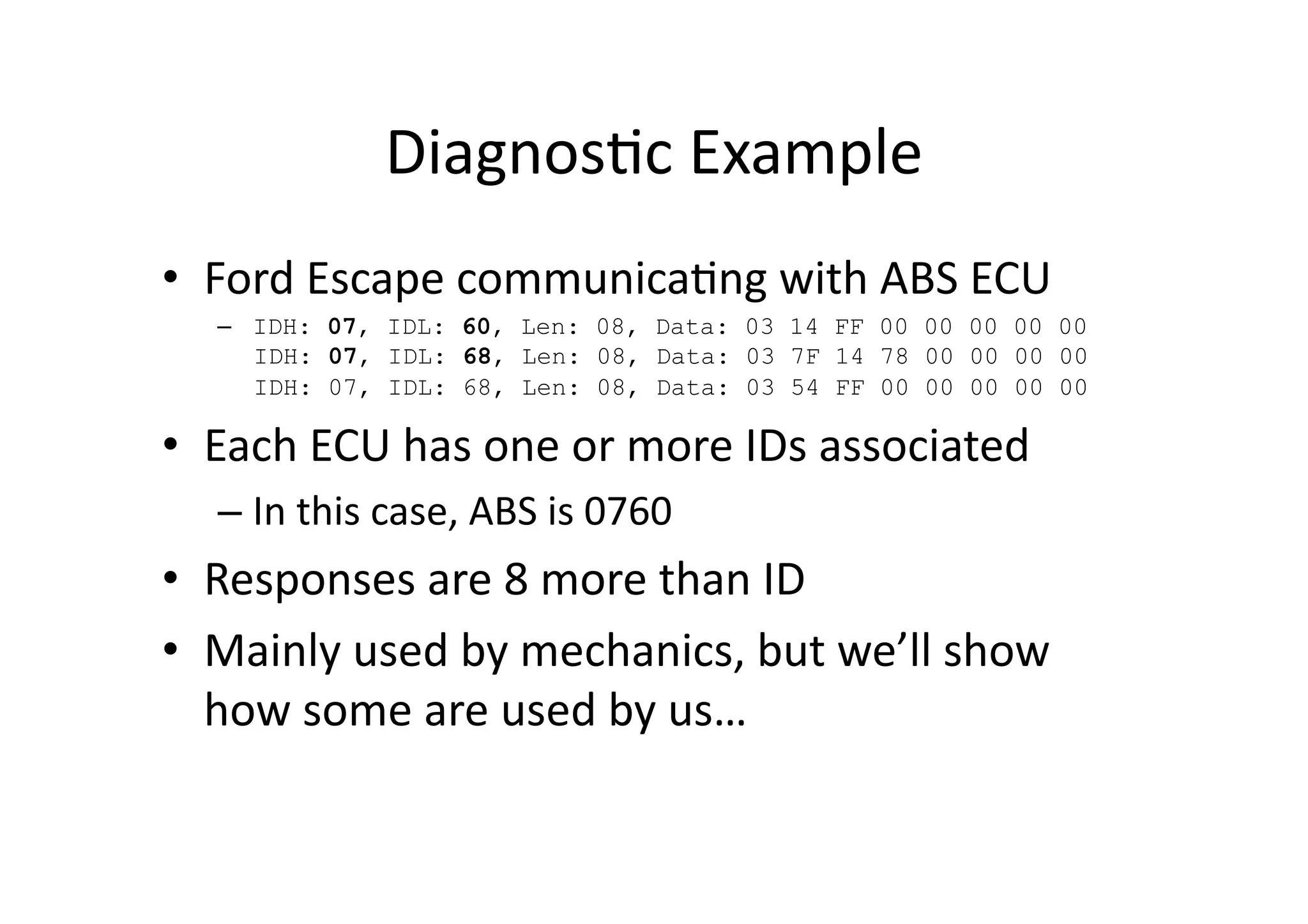
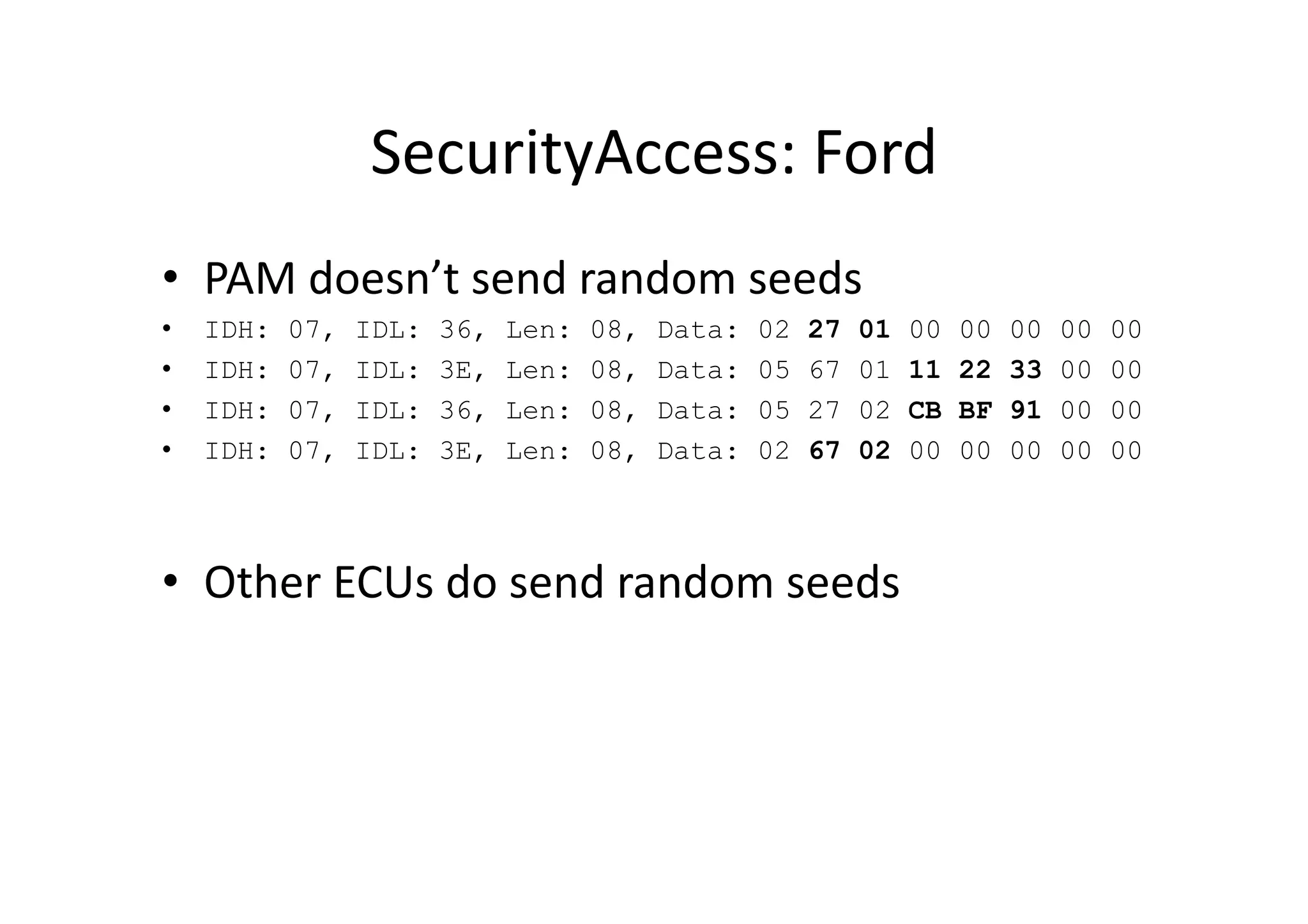
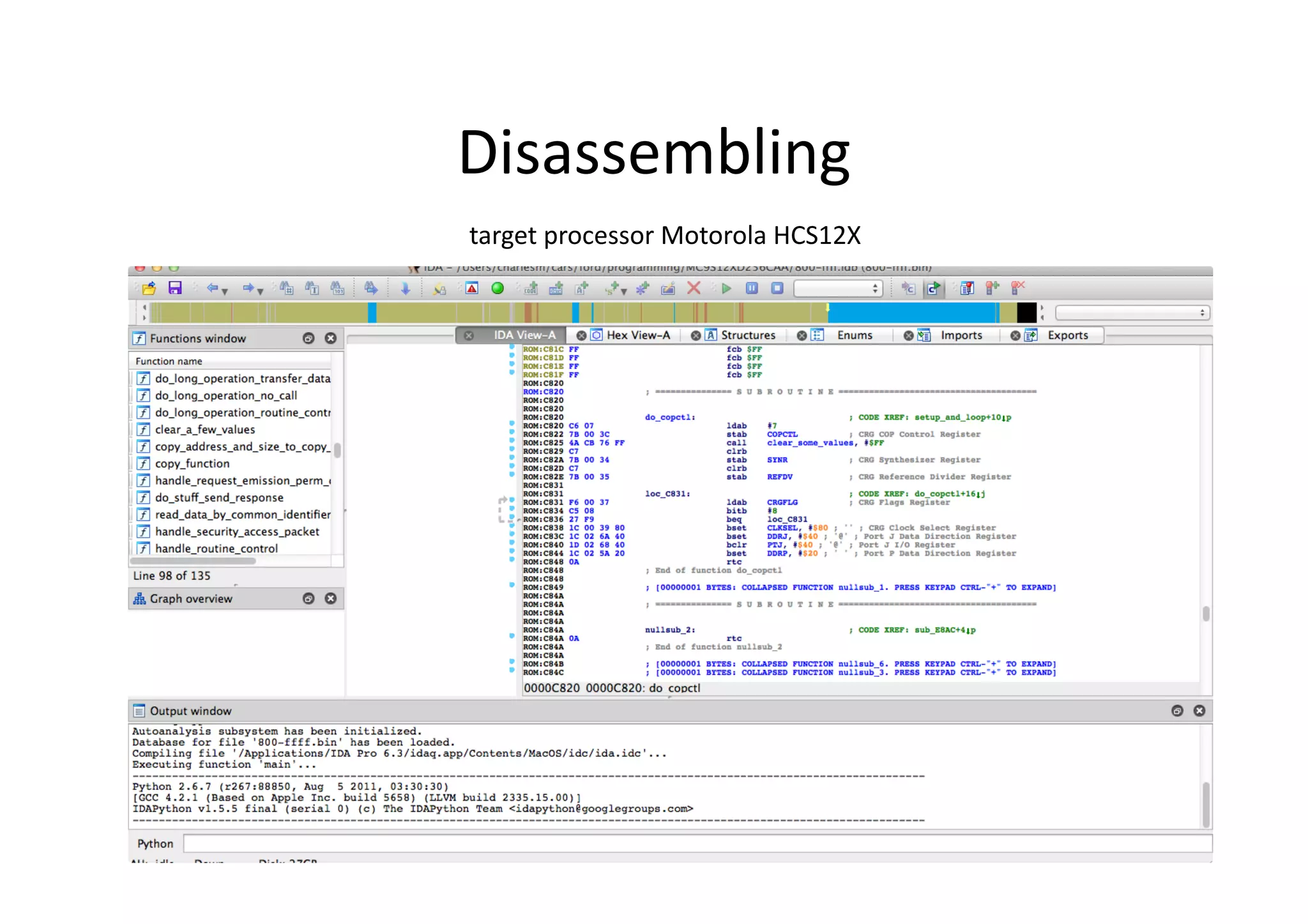
The document discusses automotive security, focusing on vulnerabilities within vehicle systems and the CAN bus architecture. It explains the anatomy of attacks, various electronic control units (ECUs), and the inherent lack of security in the design of automotive communication systems. Recommendations include improving detection of attacks, implementing layered security approaches, and segmenting CAN networks to enhance vehicle safety.




















![[CB16] Using the CGC’s fully automated vulnerability detection tools in secur...](https://cdn.slidesharecdn.com/ss_thumbnails/cb16inhyukseoen-161215063804-thumbnail.jpg?width=640&height=640&fit=bounds)






















![[cb22] Fight Against Malware Development Life Cycle by Shusei Tomonaga and Yu...](https://cdn.slidesharecdn.com/ss_thumbnails/d1t1s07tomonagamasubuchifightagainstmalwaredevelopmentlifecycle2022-10-1806-230101090047-9ab922cd-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] CloudDragon’s Credential Factory is Powering Up Its Espionage Activiti...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s04zih-cingliaoyu-tungchnagclouddragonscredentialfactoryispoweringupitsespionageactivitiesagains-230102085356-8e46661b-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Tracking the Entire Iceberg - Long-term APT Malware C2 Protocol Emulat...](https://cdn.slidesharecdn.com/ss_thumbnails/d1t1s08takahiroharuyamac2scan-230101090416-eee10a0a-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Tales of 5G hacking by Karsten Nohl](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s09221127-230103071757-420d7b85-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Hayabusa Threat Hunting and Fast Forensics in Windows environments fo...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t2s052022-10-28-dfirandthreathuntingwithwindowseventlogszachmathisversion3-230103072306-eb57bdc0-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Your Printer is not your Printer ! - Hacking Printers at Pwn2Own by A...](https://cdn.slidesharecdn.com/ss_thumbnails/anjieyangyourprintercodebluefortranslator-230103071138-8fcd3032-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Who is the Mal-Gopher? - Implementation and Evaluation of “gimpfuzzy”...](https://cdn.slidesharecdn.com/ss_thumbnails/d1t1s09yutawhoisthemalgopherenglishesix1-230102083158-ba91a7f7-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Under the hood of Wslink’s multilayered virtual machine en by Vladisla...](https://cdn.slidesharecdn.com/ss_thumbnails/d1t2s04vladislavhrckaunderthehoodofwslinksvirtualmachine-230102091156-e3c59f0e-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Wslinkのマルチレイヤーな仮想環境について by Vladislav Hrčka](https://cdn.slidesharecdn.com/ss_thumbnails/d1t2s04vladislavhrckaunderthehoodofwslinksvirtualmachinejapanesemachinetranslation-230102091457-ae9568be-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] ”The Present and Future of Coordinated Vulnerability Disclosure” Inte...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07allanfriedmanen-230103060535-324b96bf-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Are Embedded Devices Ready for ROP Attacks? -ROP verification for low-...](https://cdn.slidesharecdn.com/ss_thumbnails/d1t2s05u25yuumatakienkentarovar5-230102092618-bbf74898-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] 「協調された脆弱性開示の現在と未来」国際的なパネルディスカッション(4) by 板橋 博之](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07hiroyukiitabashijp-230103063336-b5b21552-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] 「協調された脆弱性開示の現在と未来」国際的なパネルディスカッション(3) by Lorenzo Pupillo](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07lorenzopupilojp-230103061253-df49295c-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] 「協調された脆弱性開示の現在と未来」国際的なパネルディスカッション(2)by Allan Friedman](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07allanfriedmanjp-230103060017-24438771-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] Mal-gopherとは?Go系マルウェアの分類のためのgimpfuzzy実装と評価 by 澤部 祐太, 甘粕 伸幸, 野村 和也](https://cdn.slidesharecdn.com/ss_thumbnails/d1t1s09yutawhoisthemalgopherjapanese1-230102082553-e0b239bb-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] From Parroting to Echoing: The Evolution of China’s Bots-Driven Info...](https://cdn.slidesharecdn.com/ss_thumbnails/codeblue2022chechangsilviayeh-230102084414-c1570bd5-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] "The Present and Future of Coordinated Vulnerability Disclosure" Inter...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07hiroyukiitabashien-230103064031-868ff2ae-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] "The Present and Future of Coordinated Vulnerability Disclosure" Inter...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07lorenzopupiloen-230103062123-07ea5347-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] "The Present and Future of Coordinated Vulnerability Disclosure" Inter...](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07ikuotakahashien-230103055145-37529240-thumbnail.jpg?width=640&height=640&fit=bounds)
![[cb22] 「協調された脆弱性開示の現在と未来」国際的なパネルディスカッション (1)by 高橋 郁夫](https://cdn.slidesharecdn.com/ss_thumbnails/d2t1s07ikuotakahashijp-230103054428-3dbd8ee7-thumbnail.jpg?width=640&height=640&fit=bounds)


















