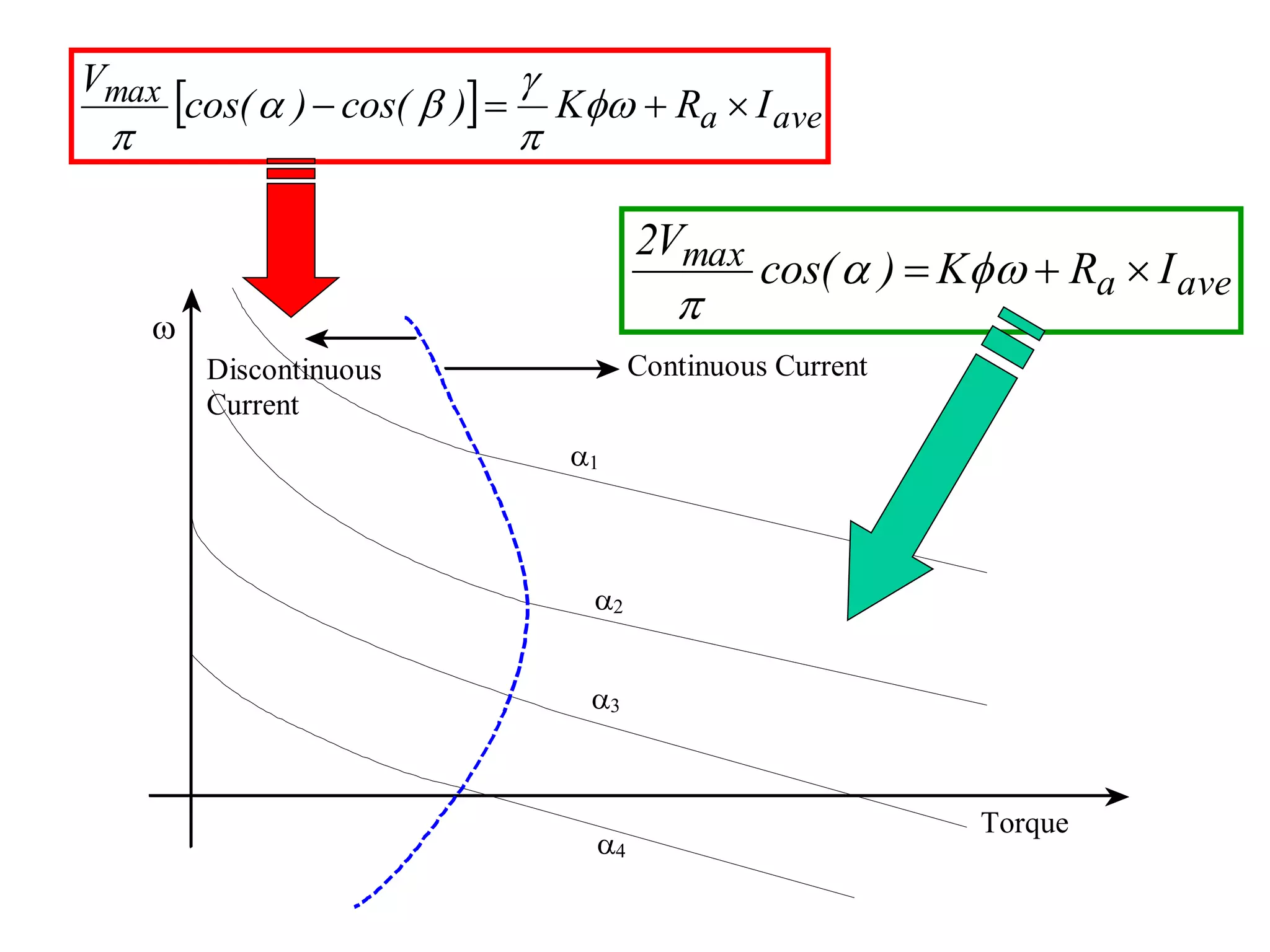
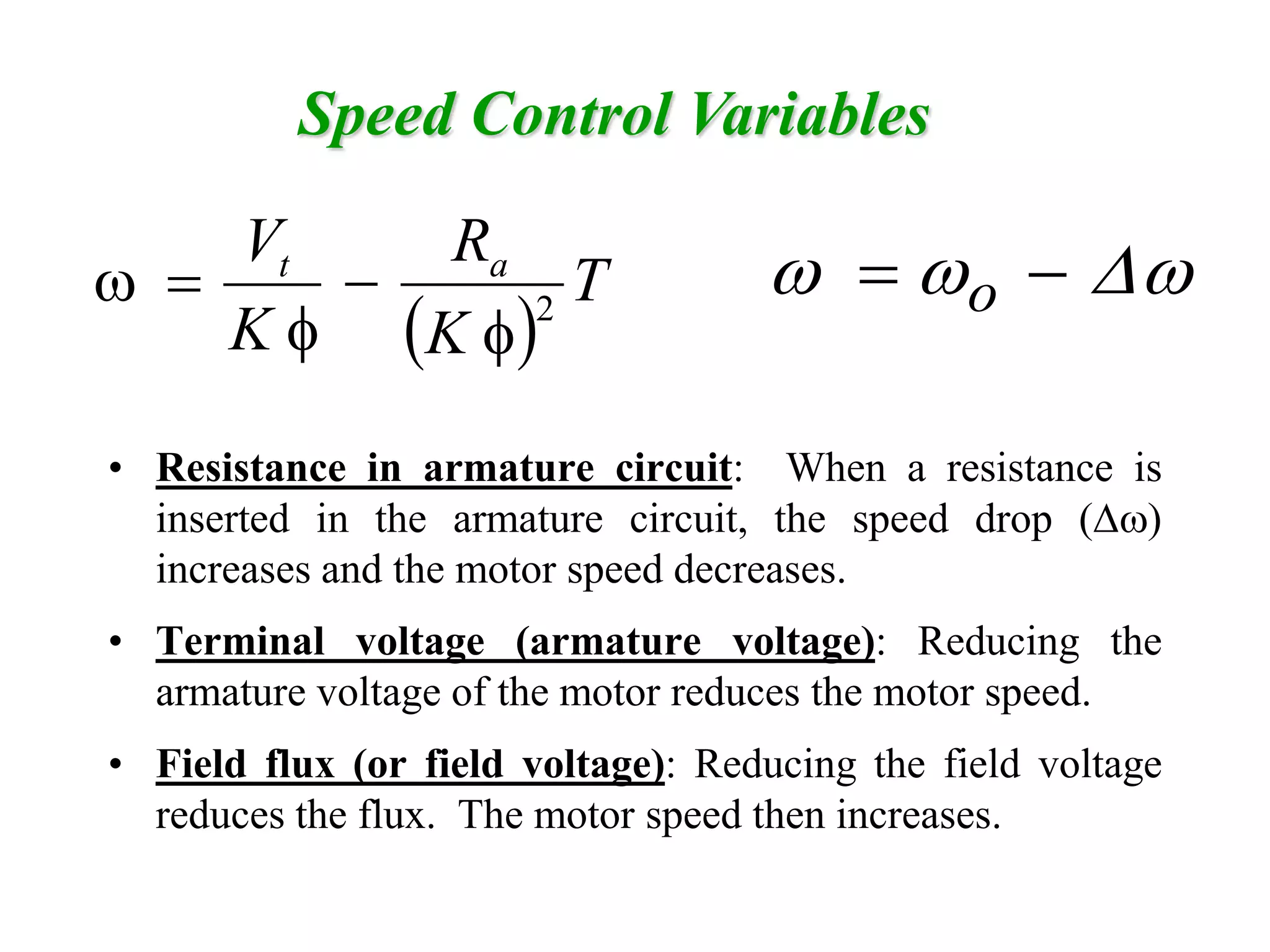
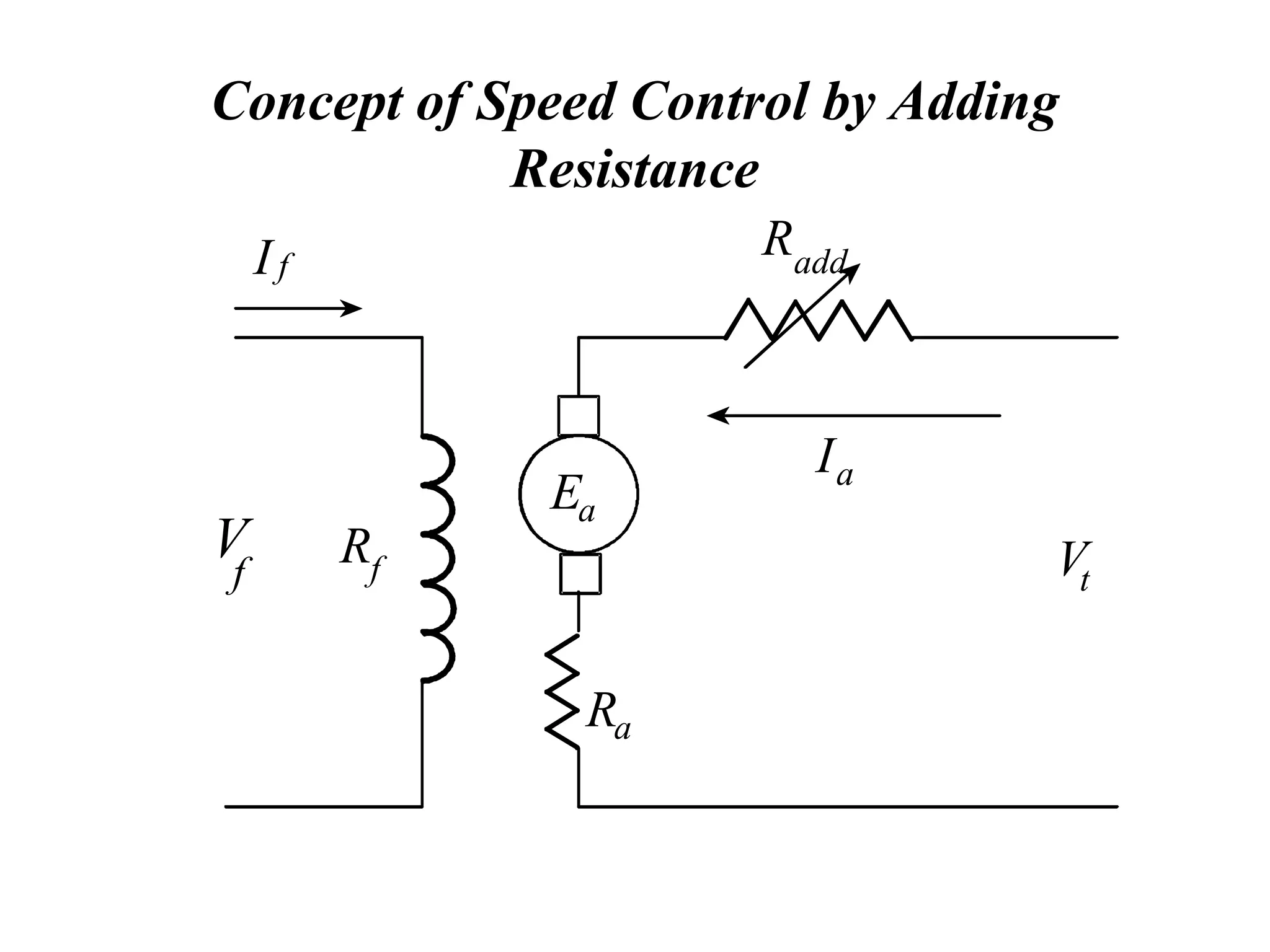
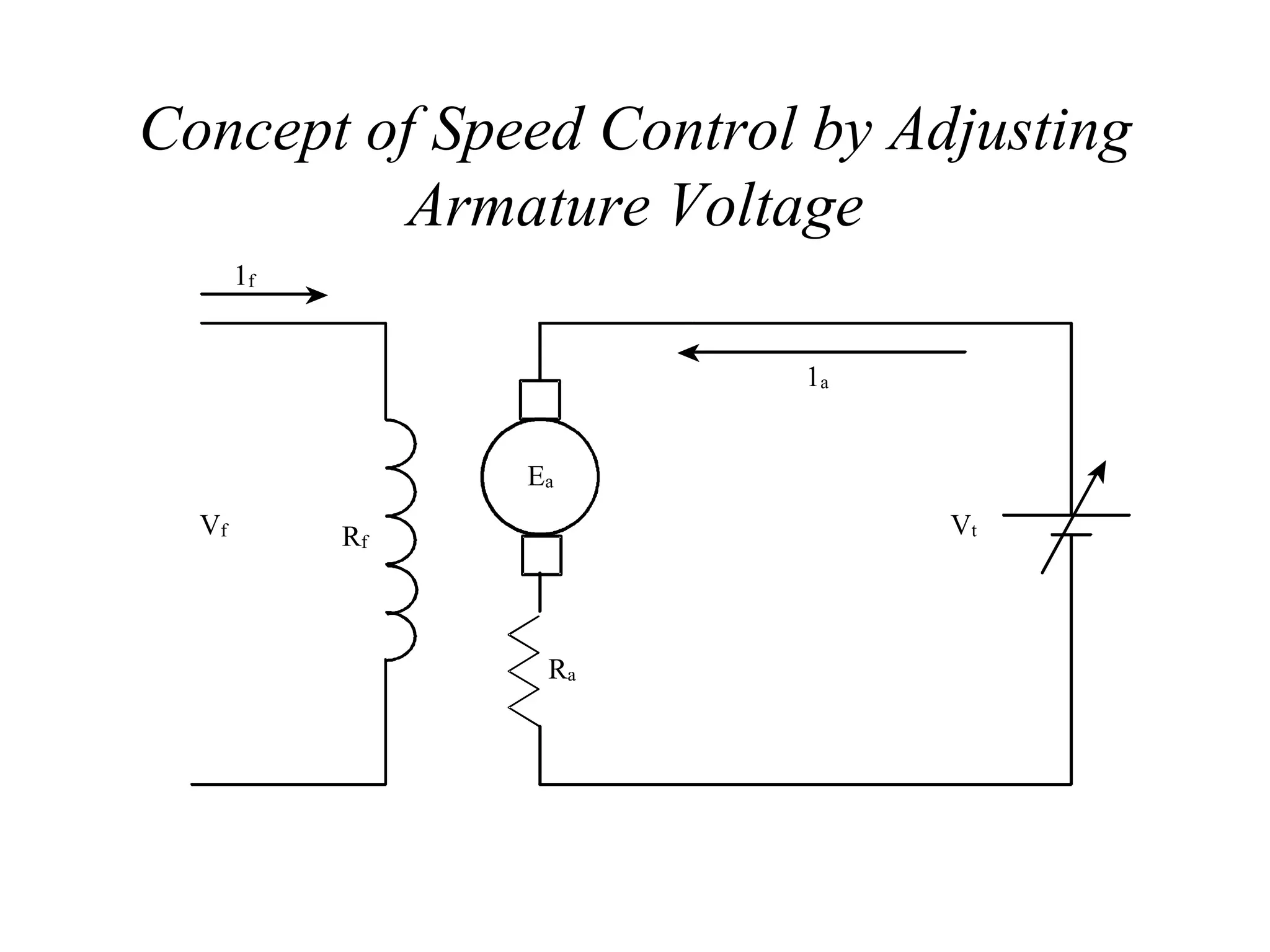
This document discusses speed control of DC motors. It provides three main methods for controlling motor speed: 1) adding resistance to the armature circuit which decreases motor speed, 2) reducing the armature voltage which also decreases speed, and 3) reducing the field voltage which increases motor speed. It also discusses attributes of good speed controllers and concepts like adding variable resistance or adjusting field/armature voltage to achieve speed control. Examples are provided to demonstrate calculating motor speed under different load or resistance conditions.








![VAK
VS
Ra
La
Ea
Vt
Single-Phase, Half-Wave Drives
)]
(
1
[
)
(
)
sin
(
)]
(
1
[
)
(
max
u
u
E
u
u
t
V
v
u
u
E
u
u
v
v
a
t
a
s
t
](https://image.slidesharecdn.com/chapter6-speed-control-dc-221117045934-965b8969/75/chapter6-speed-control-dc-ppt-17-2048.jpg)
![)]
(
1
[
)
(
)
sin
(
)]
(
1
[
)
(
max
u
u
E
u
u
t
V
v
u
u
E
u
u
v
v
a
t
a
s
t
-200.00
-150.00
-100.00
-50.00
0.00
50.00
100.00
150.00
200.00
0 90 180 270 360 450 540
Angle
vs
i
i
Ea
vt
vt
Ea+i Ra
](https://image.slidesharecdn.com/chapter6-speed-control-dc-221117045934-965b8969/75/chapter6-speed-control-dc-ppt-18-2048.jpg)

![ave
a
ave
a
a
I
R
K
V
I
R
E
V
2
]
cos
[cos
2
2
]
cos
[cos
2
max
max
VAK
VS
Ra
La
Ea
Vt
ave
a
a
a
s
ave
a
a
a
s
I
R
E
E
t
d
v
I
R
E
E
t
d
v
2
2
1
2
2
1](https://image.slidesharecdn.com/chapter6-speed-control-dc-221117045934-965b8969/75/chapter6-speed-control-dc-ppt-20-2048.jpg)
![
K
I
R
K
V a
a
t
K
I
R
K
V
Then
V
V
and
K
K
Let
a
a
t
t
~
~
~
]
cos
[cos
2
~
2
~
max
ave
a I
R
K
V
2
]
cos
[cos
2
max](https://image.slidesharecdn.com/chapter6-speed-control-dc-221117045934-965b8969/75/chapter6-speed-control-dc-ppt-21-2048.jpg)

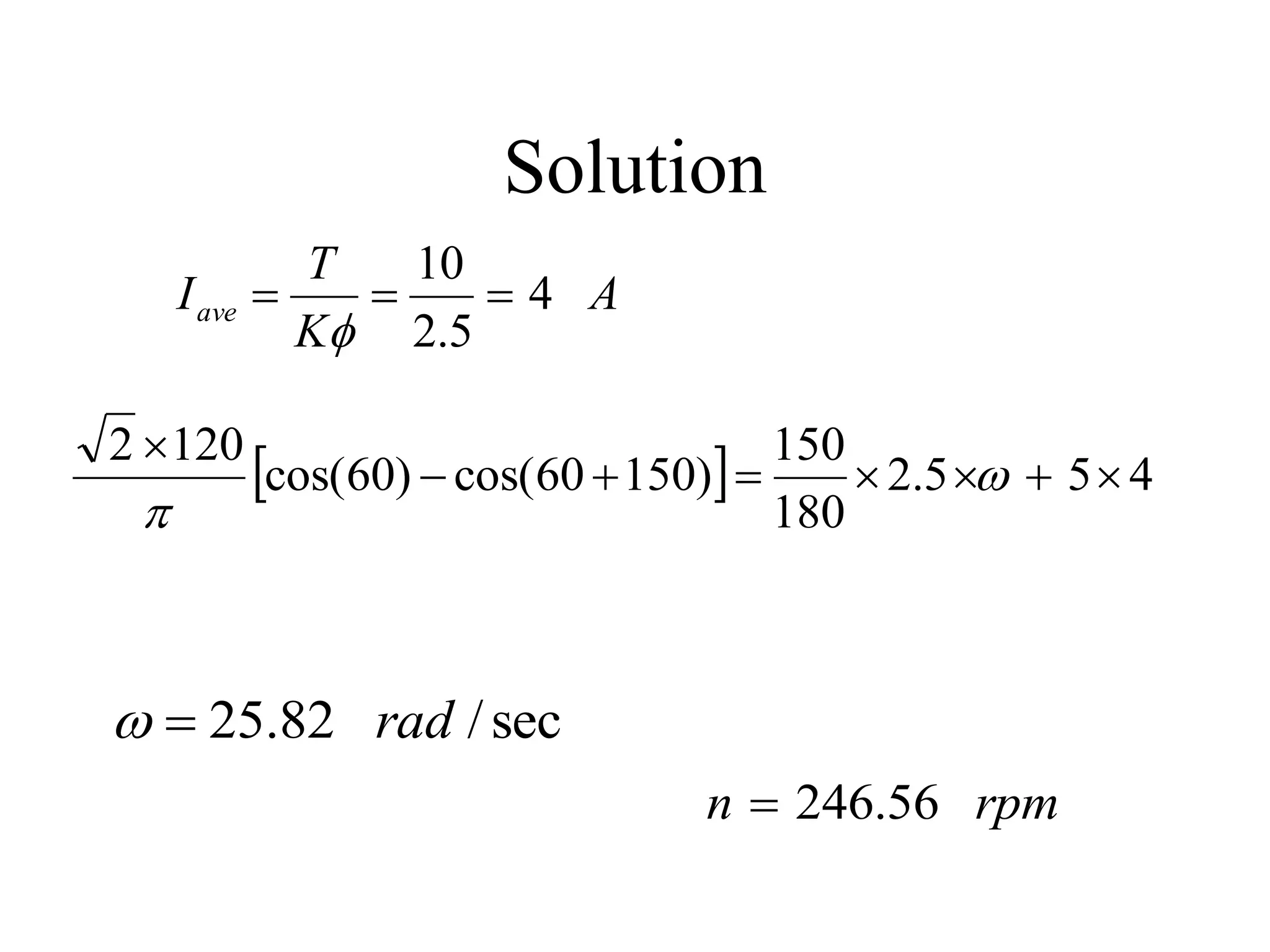
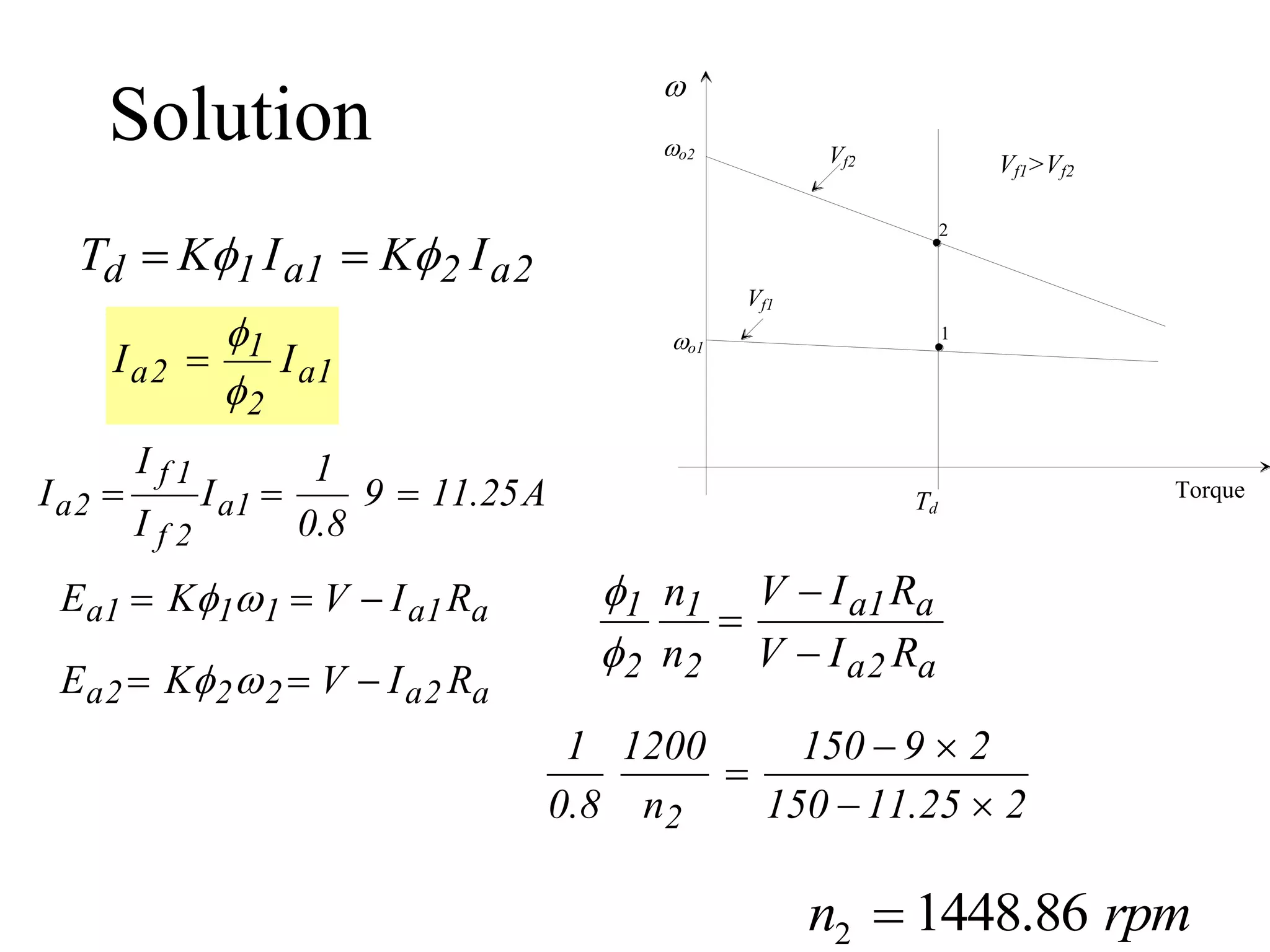
![Solution
A
K
T
Iave 4
5
.
2
10
4
5
5
.
2
360
150
)
150
60
cos(
)
60
cos(
2
120
2
sec
/
22
.
16 rad
rpm
n 88
.
154
W
I
k
I
E
P ave
ave
a
d 162
4
22
.
16
5
.
2
ave
a
max I
R
K
2
]
cos
[cos
2
V
](https://image.slidesharecdn.com/chapter6-speed-control-dc-221117045934-965b8969/75/chapter6-speed-control-dc-ppt-23-2048.jpg)