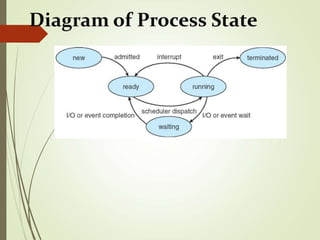
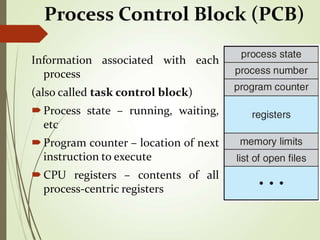
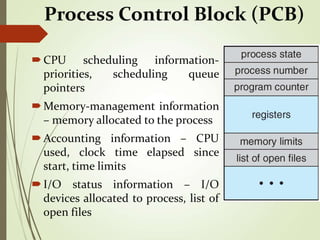
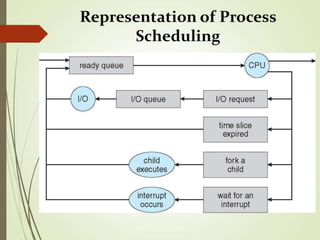
This document discusses process management and inter-process communication. It defines a process as a program in execution. Processes have multiple parts including code, activity, stack, and data sections. Processes change state as they execute, such as ready, running, waiting. The operating system uses process scheduling and context switching to allocate CPU time between processes. Processes can create and terminate child processes. Processes can communicate through either shared memory or message passing. Message passing involves establishing links and exchanging messages through send and receive operations.