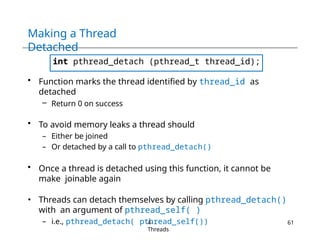
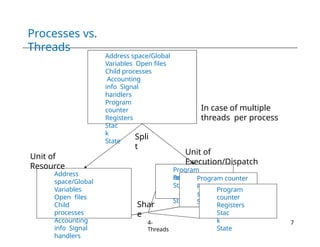
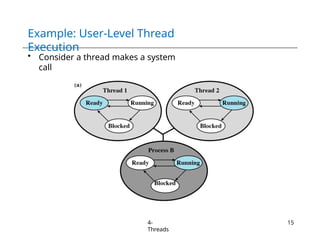
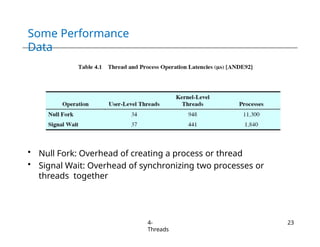
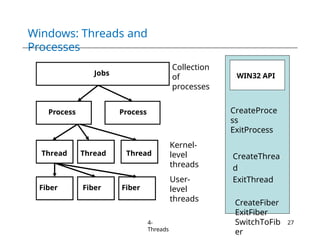
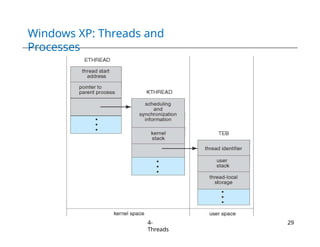
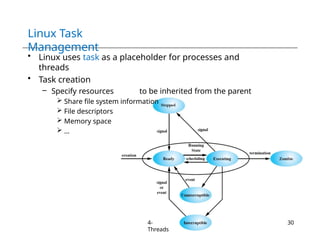
The document discusses multithreading in operating systems, distinguishing between processes and threads, where threads are the units of execution sharing the same resources within a process. It outlines the characteristics, benefits, and various models of threading, including user-level and kernel-level threads, as well as their implementations and management through libraries like POSIX and Win32. Additionally, it covers thread creation, termination, and safe passing of arguments among threads, highlighting their non-deterministic nature.
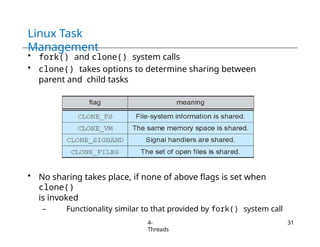

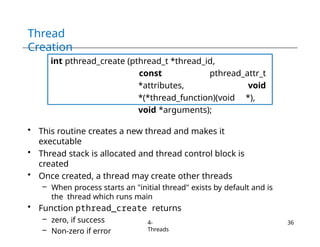
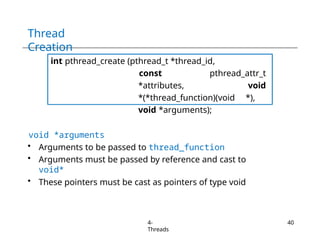
![Thread Creation:
Example
4-
Threads
41
#include
<pthread.h>
#define NUM_THREADS
5
void * PrintHello(void *threadid)
{ printf("n%d: Hello World!n",
threadid);
}
int main() {
pthread_t threads[NUM_THREADS];
int rc, t;
for(t=0;t < NUM_THREADS; t++) {
printf("Creating thread %d
n", t);
rc =
pthread_create(&threads[t
], NULL, PrintHello,
(void *)&t);
if (rc){
printf("ERROR; return code from pthread_create() is %dn",
rc); exit(-1);](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-41-320.jpg)
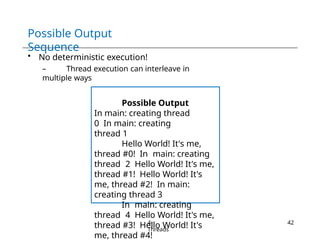
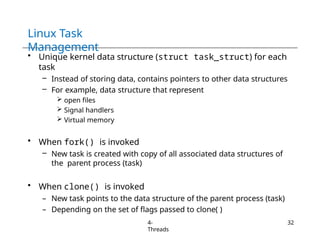
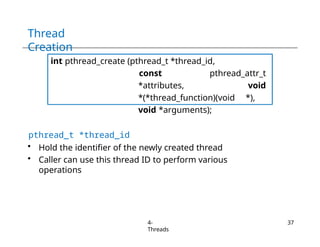
![Thread Termination:
Example
#include
<pthread.h>
#define NUM_THREADS
5
void * PrintHello(void *threadid)
{ printf("n%d: Hello World!n",
threadid); pthread_exit(NULL);
}
int main() {
pthread_t threads[NUM_THREADS];
int rc, t;
for(t=0;t < NUM_THREADS; t++) {
printf("Creating thread %d
n", t);
rc =
pthread_create(&threads[t
], NULL, PrintHello,
(void *)&t);
if (rc){
printf("ERROR; return code from pthread_create() is %dn",
rc); exit(-1);
}
}
4-
Threads
45](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-46-320.jpg)
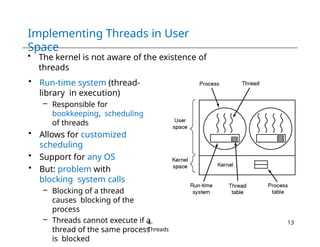
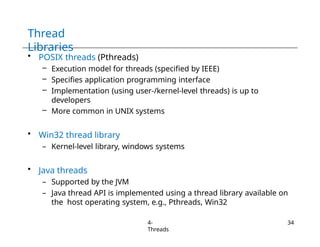
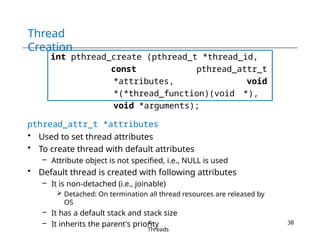
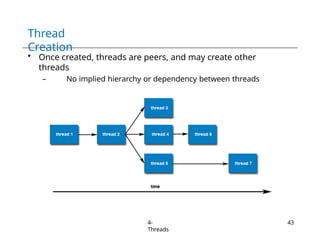
![Passing Arguments to
Threads
4-
Threads
48
• Incorrectly passed arguments
for(t=0;t < NUM_THREADS;t++) {
printf("Creating thread %dn", t);
rc = pthread_create(&threads[t], NULL, printHello,(void
*) &t);
...
}
• Correctly passed arguments
int *tids[NUM_THREADS];
for(t=0;t < NUM_THREADS;t++)
{
tids[t] = new int;
*tids[t] = t;
printf("Creating thread
%dn", t);
rc =
pthread_create(&threads[
t],NULL,PrintHello,
(void*)tid[t]);](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-48-320.jpg)
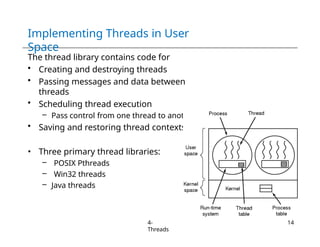
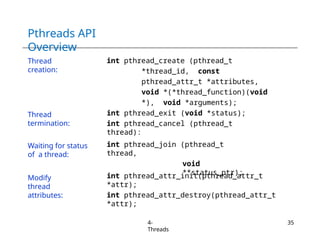
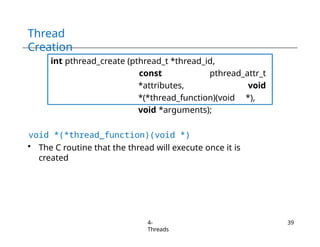
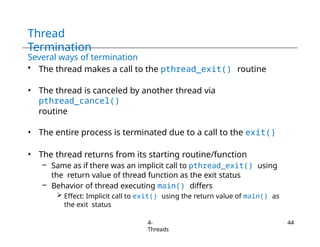
![Passing Structure as
Argument
struct thread_data {
int thread_id;
int sum;
};
thread_data
thread_data_array[N
UM_THREADS];
int main() { ...
thread_data_array[t].thread_id =
t; thread_data_array[t].sum =
sum;
rc = pthread_create(&threads[t],
NULL, PrintHello,
(void )&thread_data_array[t]) ;
...
}
void *PrintHello(void *threadarg) {
thread_data *my_data;
my_data = (struct thread_data *) threadarg;
taskid = my_data->thread_id;
} 4-Threads
48](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-49-320.jpg)
![Changing Thread Attributes:
Example
#define NUM_THREADS 5
#define MEGEXTRA 1000000
#define N 1000
Pthread_attr_t attr;
int main() {
pthread_t
threads[NUM_THREADS]; int
rc, t;
size_t stacksize
pthread_attr_init( &attr);
pthread_attr_getstacksize(&attr,
&stacksize); printf(“Default stack size -
%lin”, stacksize); stacksize =
sizeof(double) * N * N + MEGEXTRA;
pthread_attr_setstacksize (&attr,
stacksize); for(t=0;t < NUM_THREADS; t++) {
printf("Creating thread with stacksize -
%lin", stacksize);
rc = pthread_create(&threads[t], &attr,
PrintHello, (void *)&t);
. . .
}
pthread_attr_destroy(&attr):
. .
.
4-
Threads
51](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-52-320.jpg)
![Joinable Threads:
Example
#include <stdio.h>
#include
<pthread.h>
int x = 5;
int child_code()
{
while (x>0)
{ x=x-1;
printf("x
has
changed
to %d”
,x);
}
return 0;
}
int main(int
argc, char
*argv[])
{
int rc;
void** status=0;
pthread_t
/* Set threads properties */
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&at
tr, PTHREAD_CREATE_JOINABLE);
/* Create new thread */
rc =
pthread_create(&child_thread,
&attr, (void*) &child_code,
NULL);
/* Free attributes object */
pthread_attr_destroy(&attr);
/* concurrent computation
*/ x=x+5;
printf("x has change to
%dn",x);
/*wait for thread to terminate
*/ pthread_join(child_thread,
status); pthread_exit(NULL);
}
4-
Threads
57](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-57-320.jpg)

![Joinable Threads:
Example
#include
<pthread.h>
#define NUM_THREADS
4
void *BusyWork(void
*t){ long tid =
(long)t; double
result=0.0;
printf("Thread %ld
starting...n",tid);
for (int i=0; i<1000000; i++)
{ result = result + sin(i) *
tan(i);
}
printf("Thread %ld done.
Result = %en",tid,
result);
pthread_exit((void*) t);
}
int main (int argc, char
*argv[]) { pthread_t
thread[NUM_THREADS];
pthread_attr_t attr;
int rc;
long
void
*status;
/* Initialize & set thread
attribute */
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&attr,
PTHREAD_CREATE_JOINABLE);
for(t=0; t<NUM_THREADS; t++) {
printf("Main:creating thread %ld
n", t);
pthread_create(&thread[t],
&attr, BusyWork, (void
*)t);
}
/* Free attribute & wait for
threads */
pthread_attr_destroy(&attr)
; for(t=0; t<NUM_THREADS;
t++) {
pthread_join(thread[t],
&status);
printf("Main: completed
join with thread
%ld with status %ldn", t,
(long)status);
}
printf("Main: program
}
4-
Threads
59](https://image.slidesharecdn.com/chapter4-threads-241103122355-27601741/85/Chapter-4-Operating-Systems-Threads-pptx-59-320.jpg)