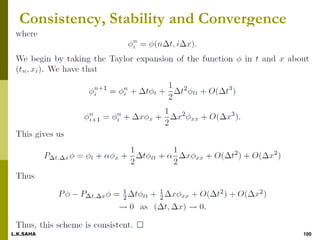
The document discusses consistency, stability, and convergence for finite difference approximations of partial differential equations (PDEs). It states that a finite difference approximation is consistent if the difference between the PDE and approximation goes to zero as the grid is refined. It is stable if errors do not grow from one time step to the next. Von Neumann stability analysis determines stability by examining the growth of Fourier components of the numerical solution.
![Consistency, Stability and Convergence
L.K.SAHA 97
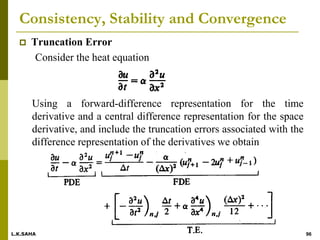
truncation error for this finite-difference representation of the
heat equation is defined as the difference between the partial
differential equation and the difference approxi-mation to it.
That is, T.E. = PDE - FDE.
The order of the truncation error in this case is O(t) + O[(x)2
] which is frequently expressed in the form O[t, (x)2 ].
Naturally, we solve only the finite-difference equations and
hope that the truncation error is small.
How do we know that our difference representation is
acceptable and that a marching solution technique will work in
the sense of giving us an approximate solution to the PDE?
In order to be acceptable, our difference representation for this
marching problem needs to meet the conditions of consistency
and stability.](https://image.slidesharecdn.com/cfd-fdm10-230312171355-e112d042/85/CFD-FDM_10-pdf-2-320.jpg)
![Consistency, Stability and Convergence
L.K.SAHA 98
A finite-difference representation of a PDE is said to be consistent if we can
show that the difference between the PDE and its difference representation
vanishes as the mesh is refined,
This should always be the case if the order of the truncation error vanishes
under the grid refinement [i.e., O(t), O(x), etc.].
0 0
. . lim lim . 0
mesh mesh
i e PDE FDE T E
](https://image.slidesharecdn.com/cfd-fdm10-230312171355-e112d042/85/CFD-FDM_10-pdf-3-320.jpg)