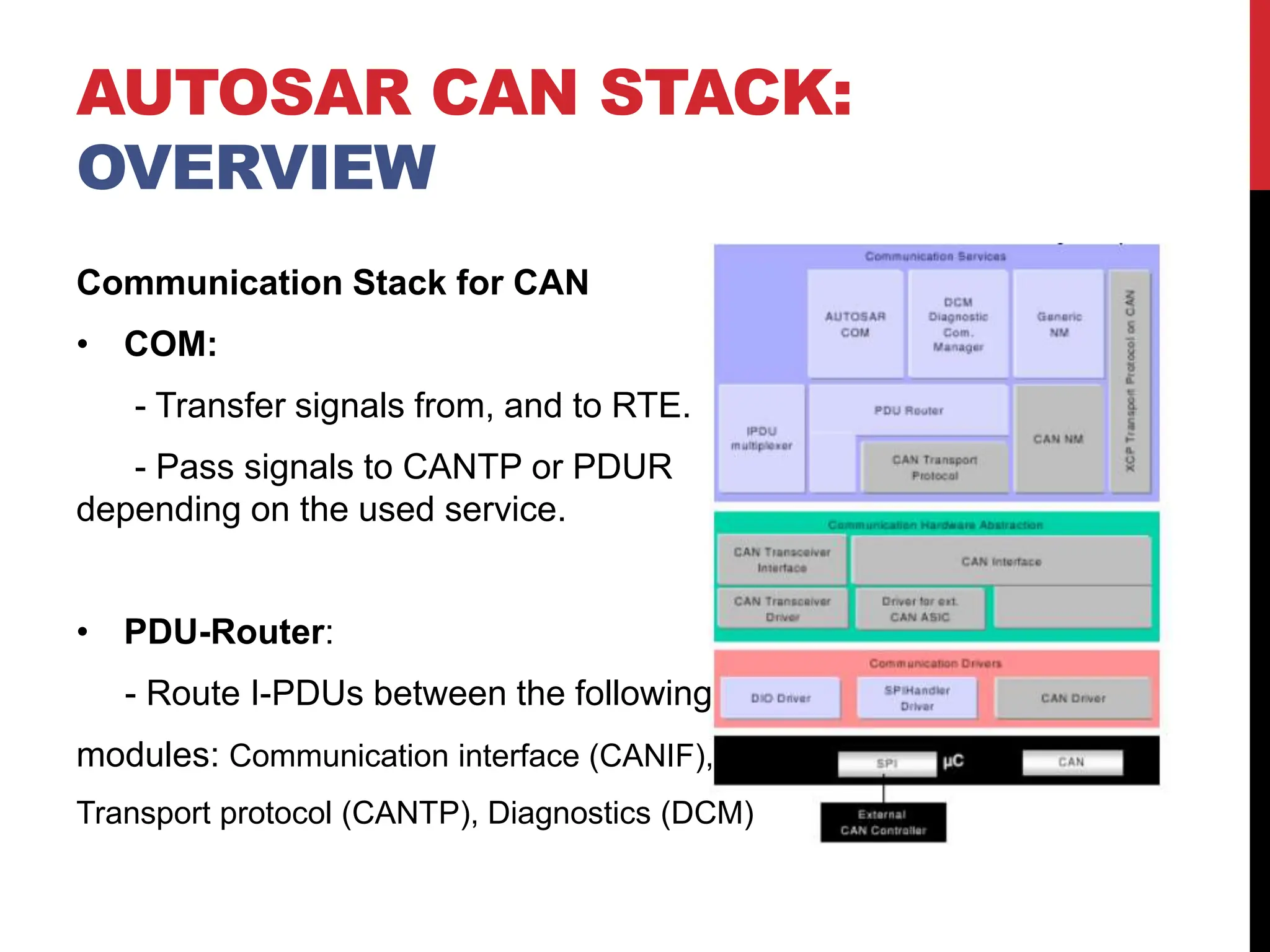
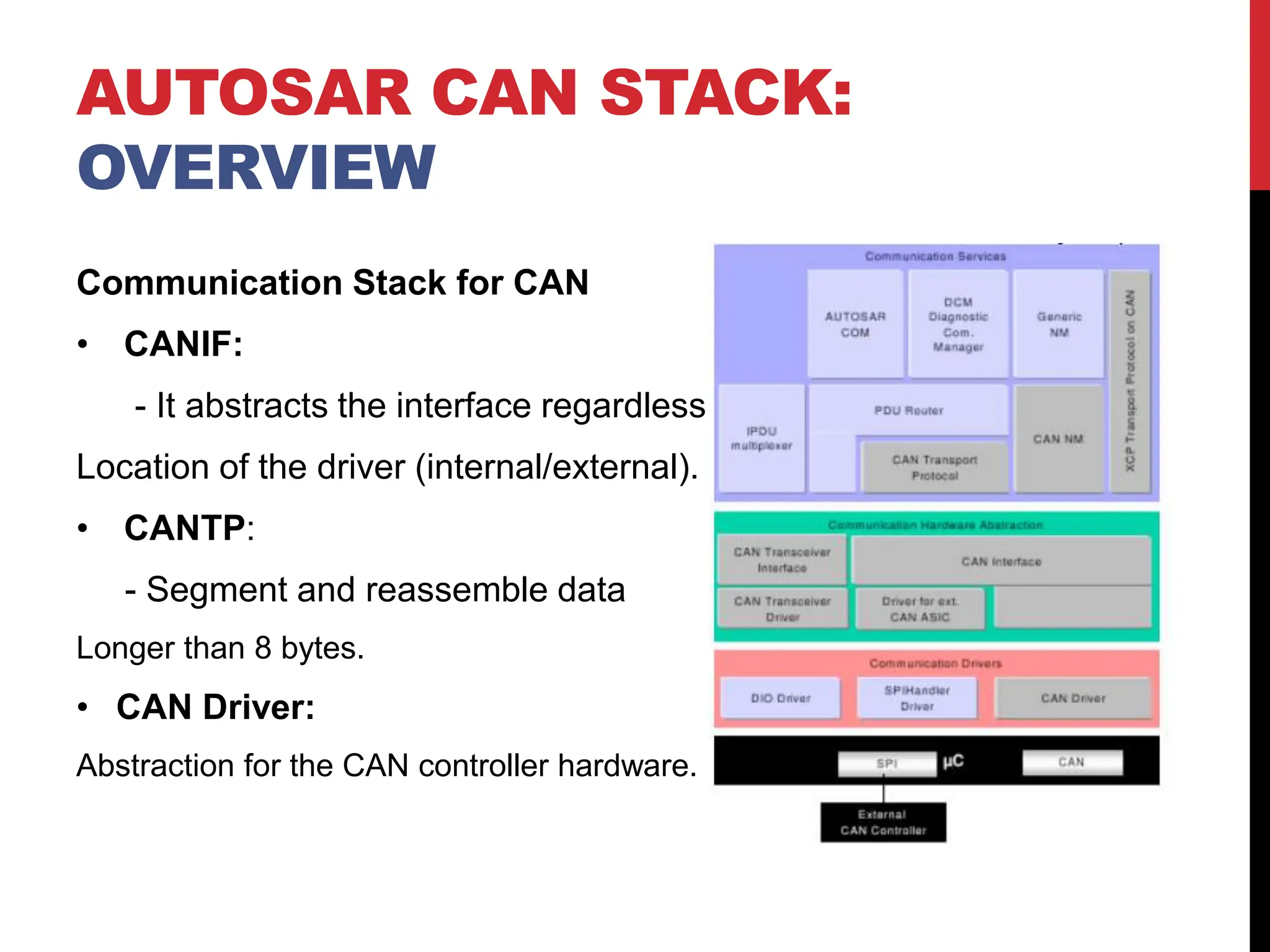
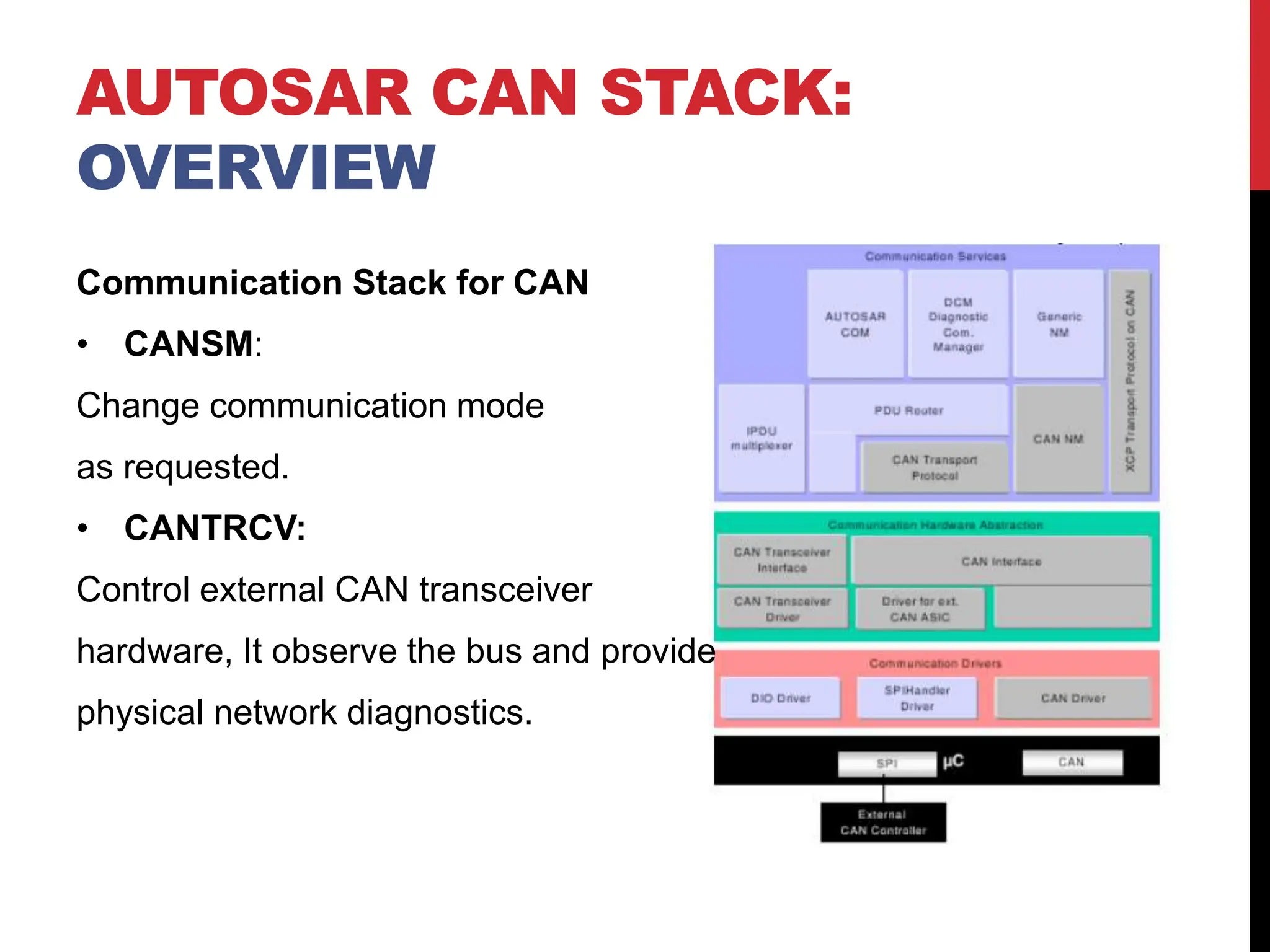
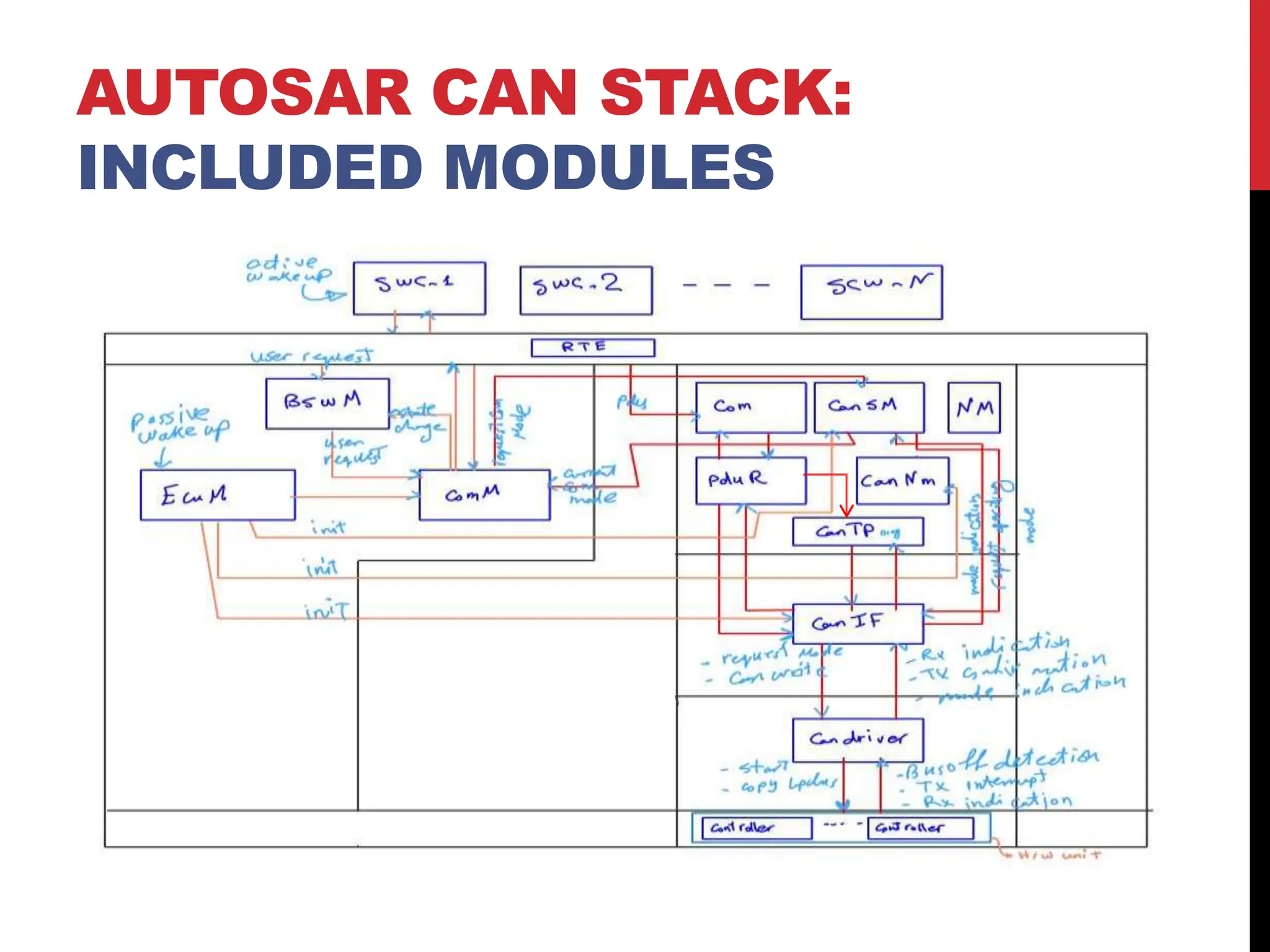
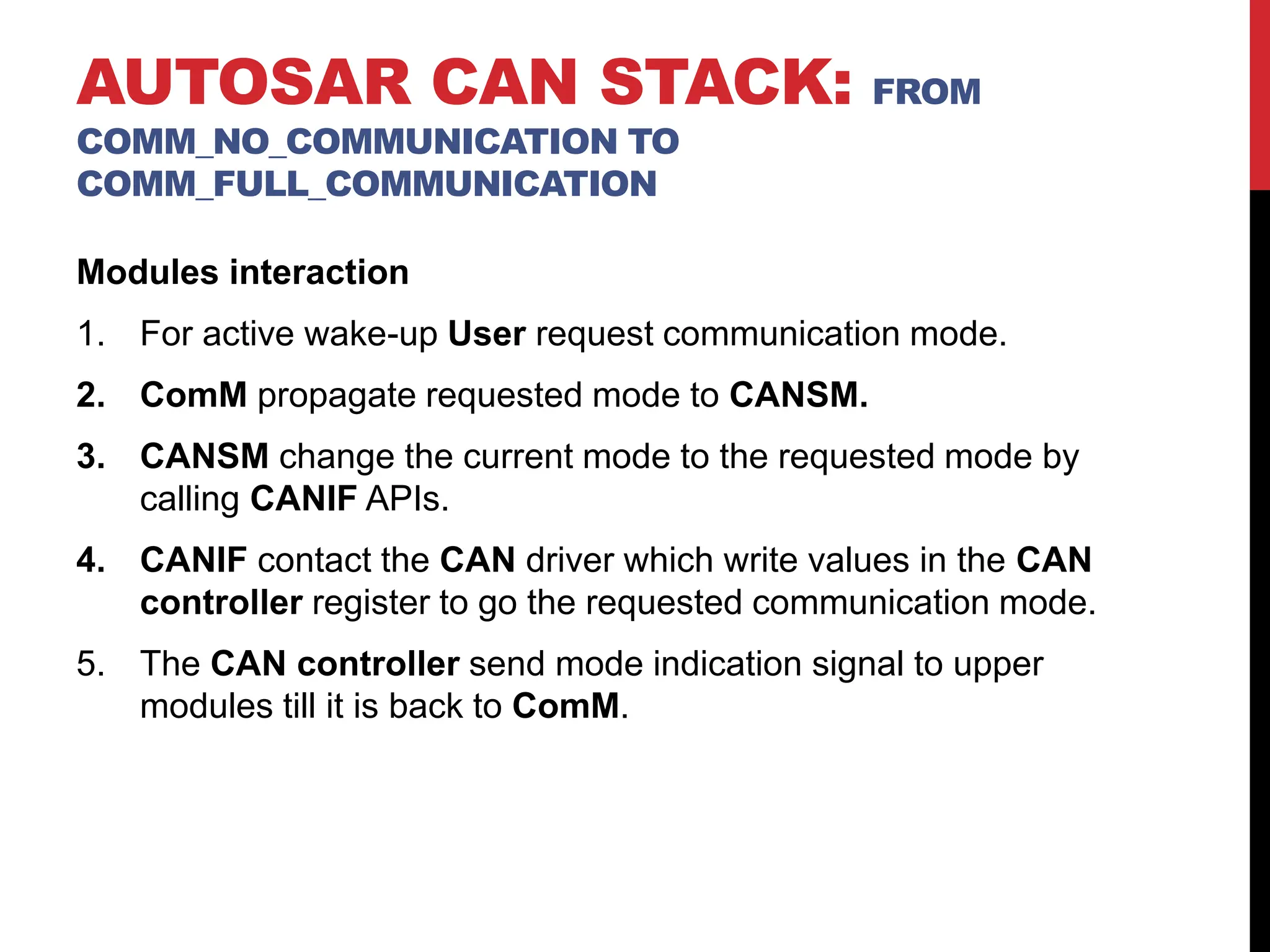
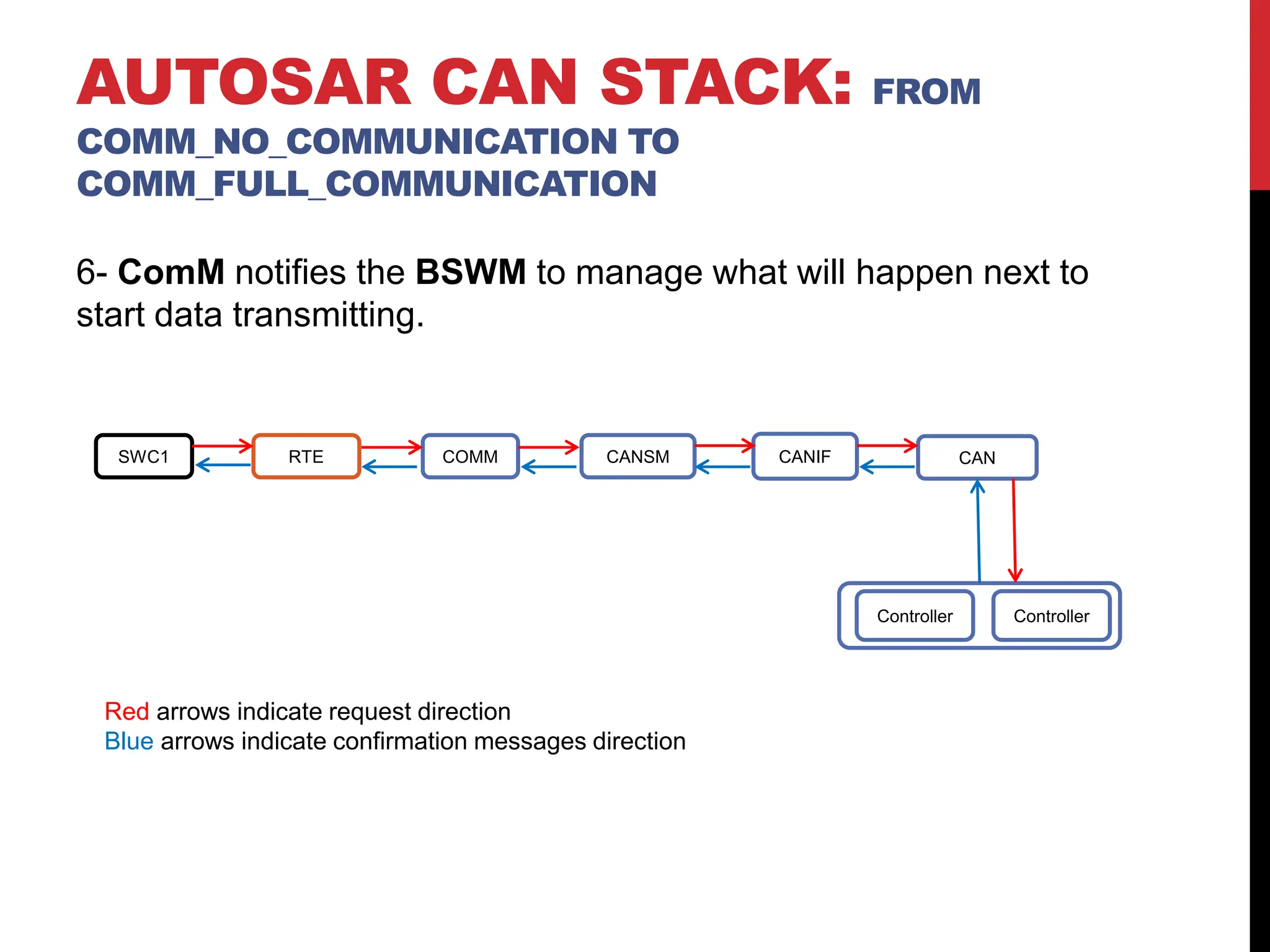
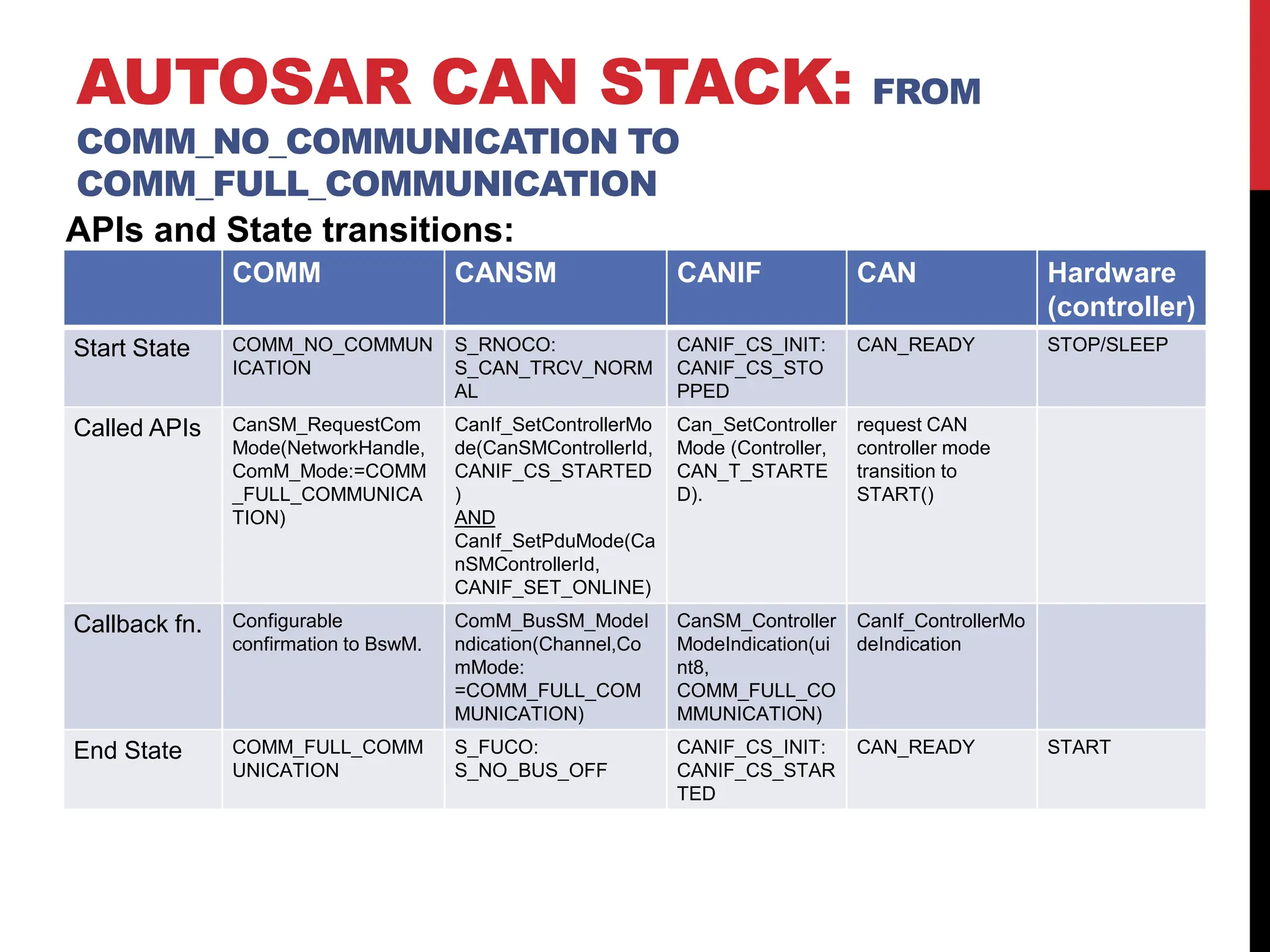
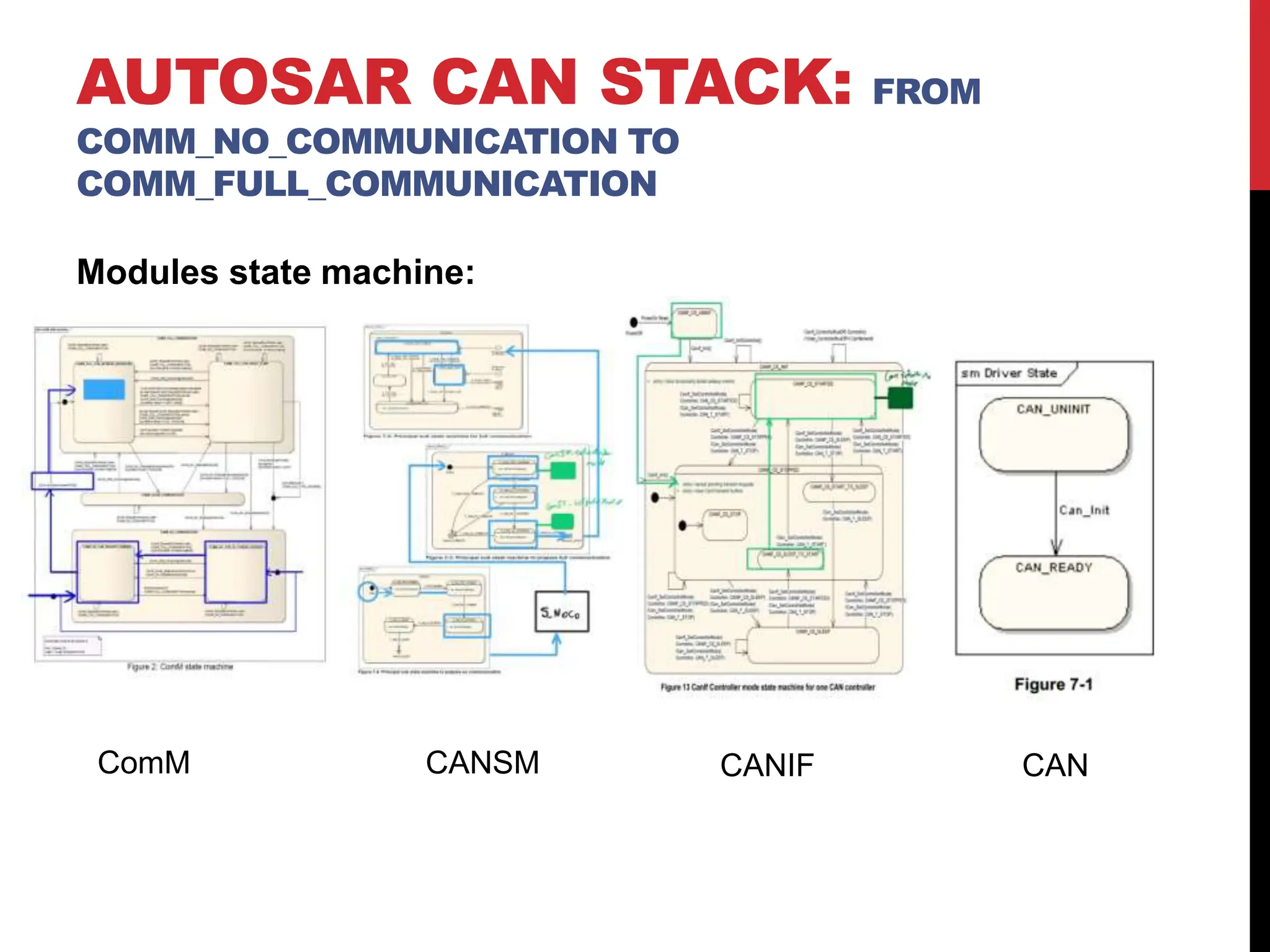
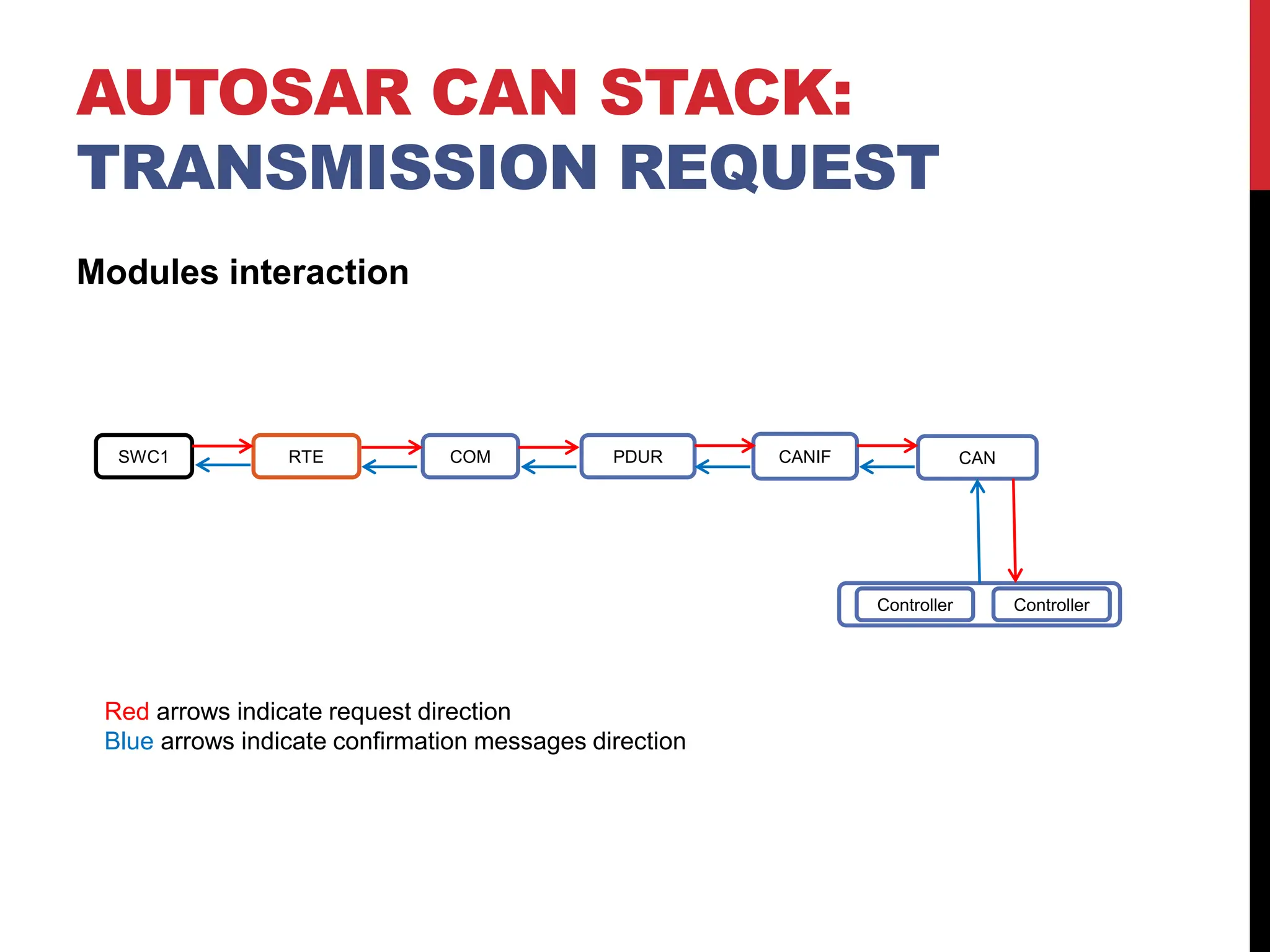
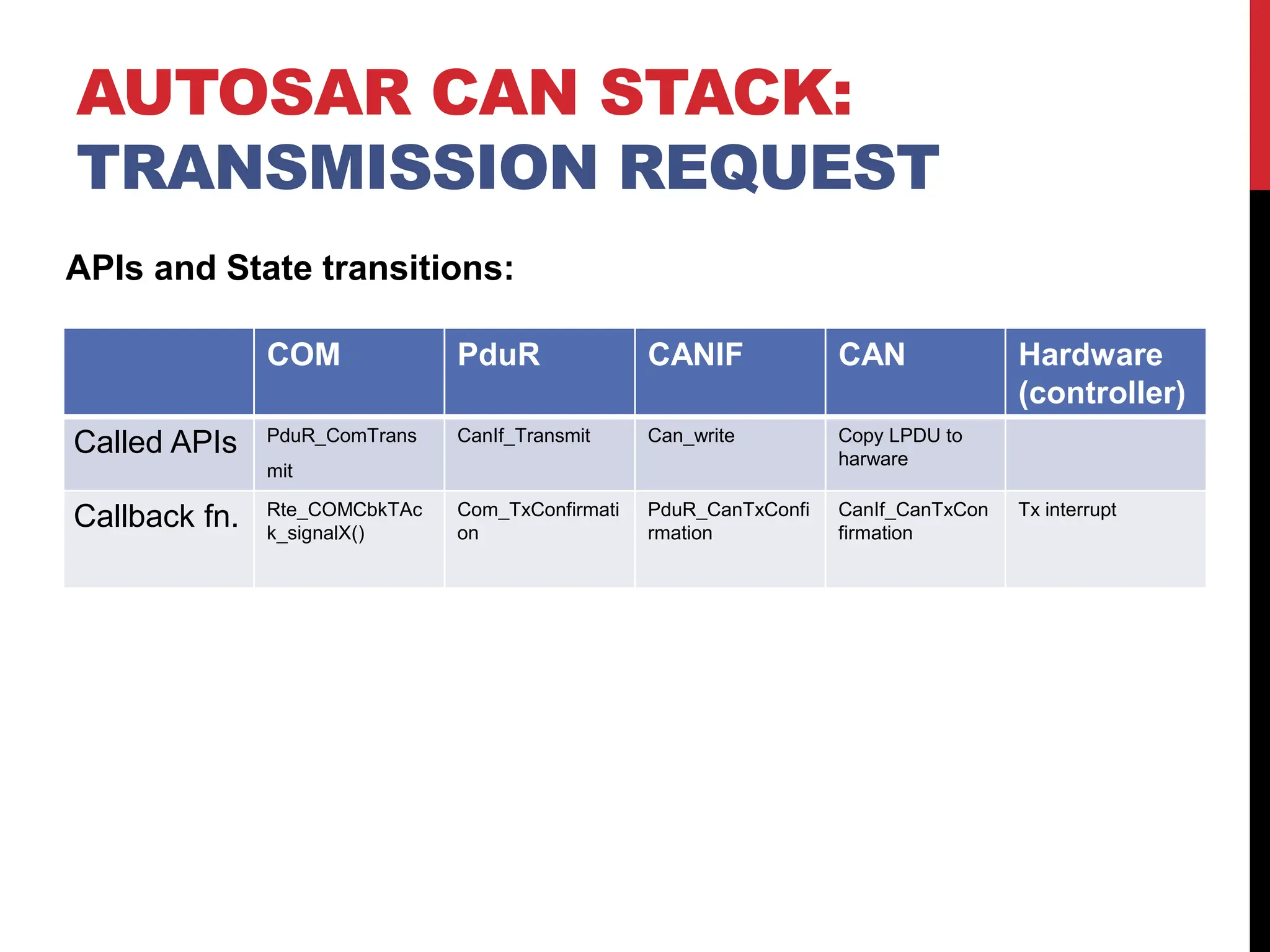
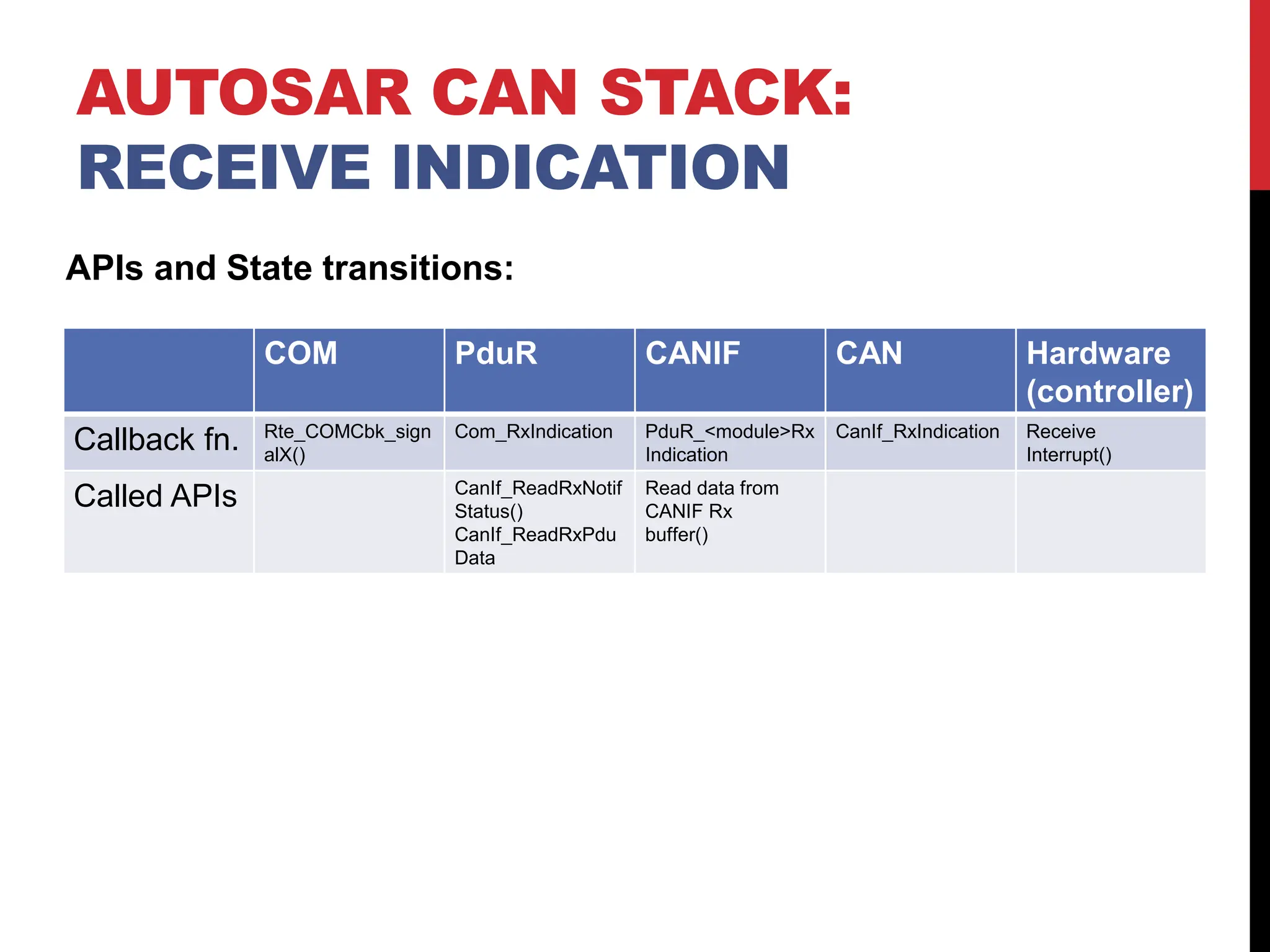
The document summarizes the Autosar CAN communication stack, which includes modules like COM, PDU-Router, CANIF, CANTP, CANSM, and CAN driver. It describes the interaction between these modules to transition from no communication to full communication state upon a request, transmit a message onto the CAN bus, and receive an incoming message from the CAN bus.