Published on Apr 11, 2015 第153回小江戸らぐ 発表資料 Dockerで、チャットサーバを立ち上げる https://www.slideshare.net/miurahr/building-production-on-docker



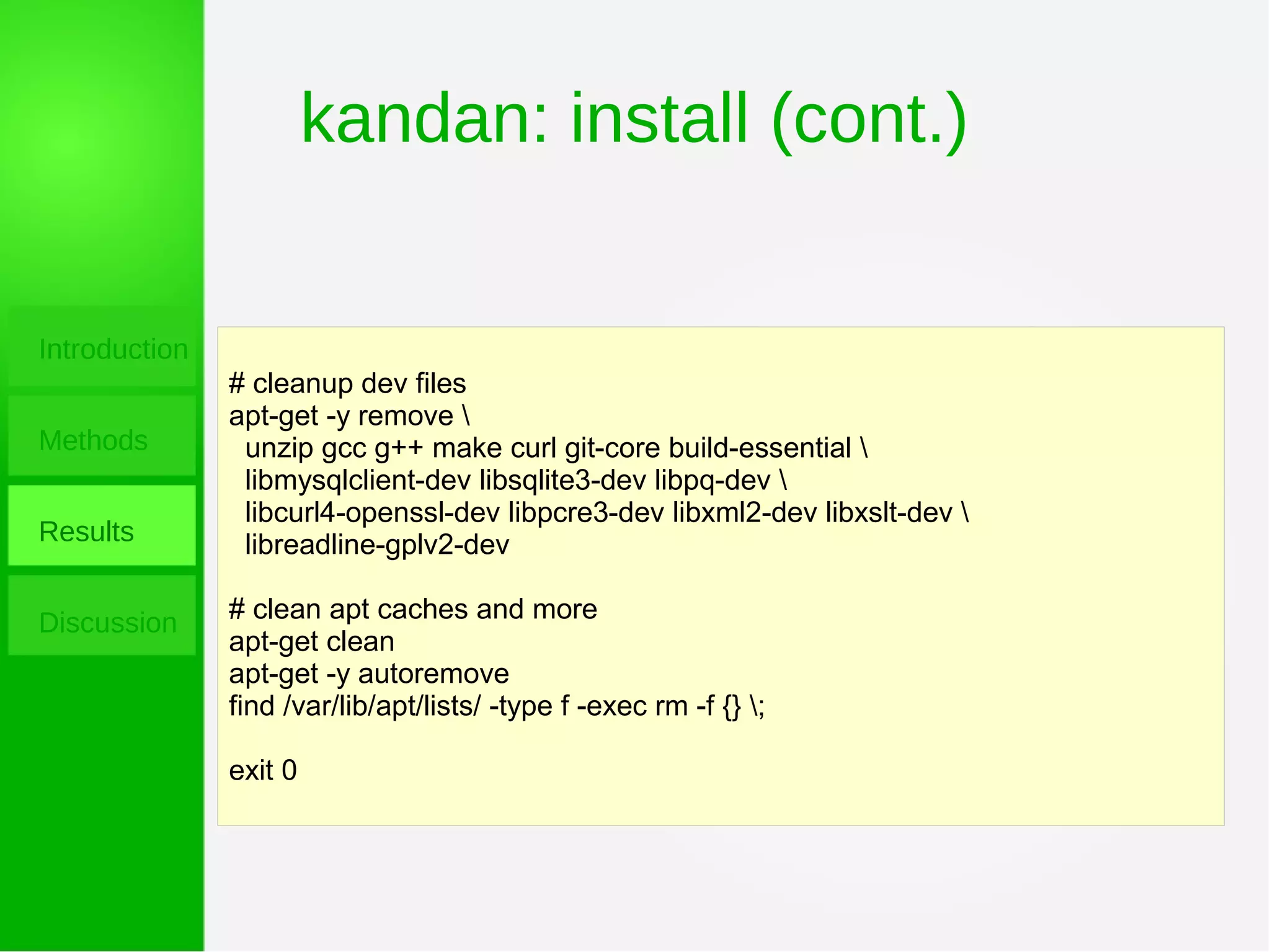
![kandan: install
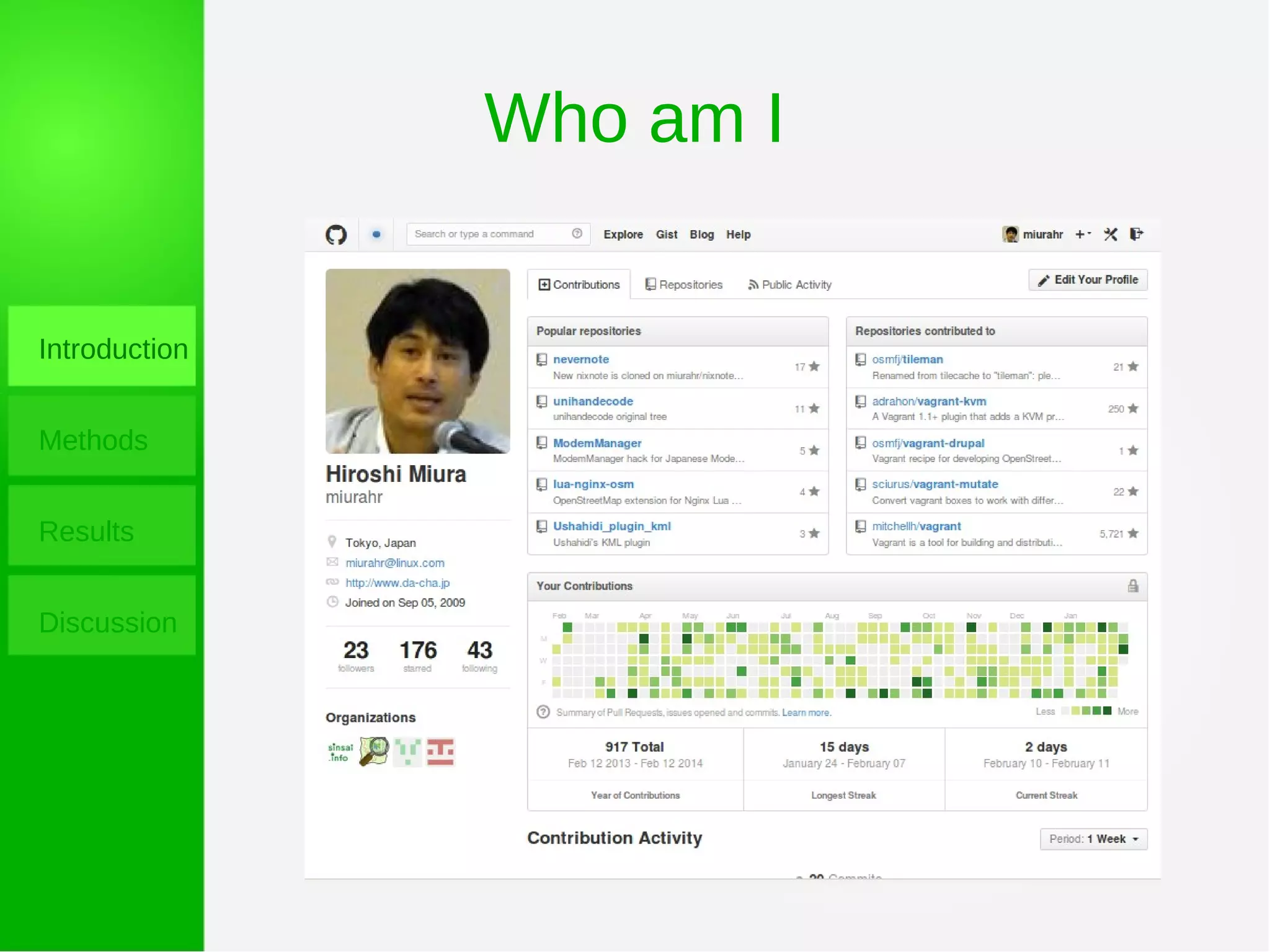
Introduction
Methods
Results
Discussion
#!/bin/bash
( いろいろ : 環境変数設定、ユーザ作成、 gem や Bundle のパス設定)
apt-get update
apt-get -y install supervisor build-essential curl unzip git-core gcc
curl -sL https://deb.nodesource.com/setup | bash -
apt-get -y install nodejs
apt-get -y install sqlite3 libmysqlclient18 libmysqlclient-dev libsqlite3-dev
( いろいろ)
cat > ${KANDAN_CONF} <<__EOL__
[program:kandan]
command=${BUNDLE} exec thin start -e production
autostart=true
autorestart=false
username=${RUN_USER}
directory=${INSTALL_DIR}/kandan
stdout_logfile=${LOG_DIR}/%(program_name)s.log
stderr_logfile=${LOG_DIR}/%(program_name)s.log
environment=RBENV_ROOT=${RBENV_ROOT}
__EOL__
sudo -u ${RUN_USER} -E -H
git clone --depth 1 -b i18n --single-branch https://github.com/miurahr/kandan.git](https://image.slidesharecdn.com/buildingproductionondocker-150411035700-conversion-gate01-180407053020/75/Building-production-server-on-docker-16-2048.jpg)
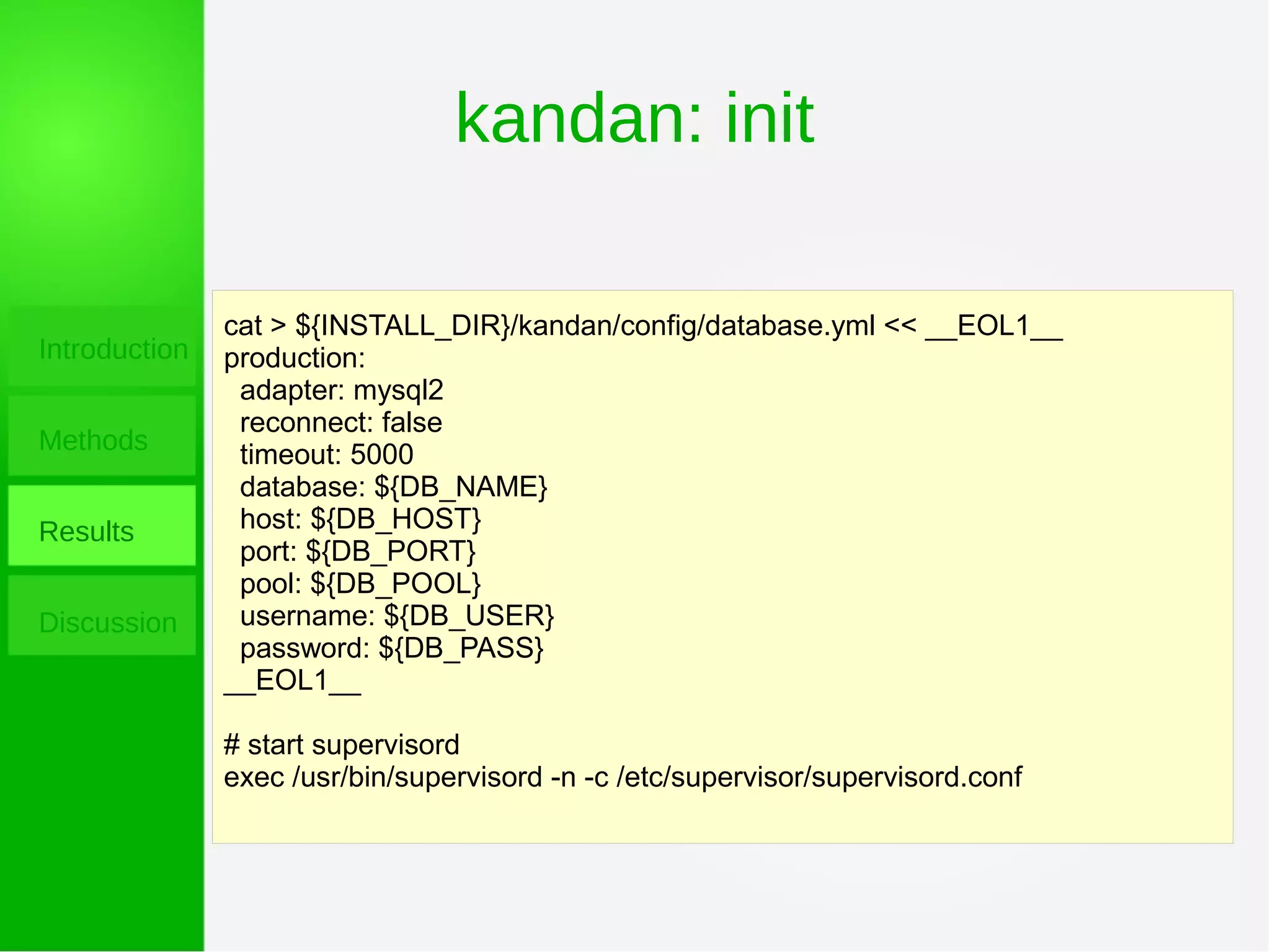
![kandan: init (cont.)
Introduction
Methods
Results
Discussion
prog="mysqladmin -h ${DB_HOST} -P ${DB_PORT} -u ${DB_USER}
${DB_PASS:+-p$DB_PASS} status"
timeout=60
echo -n "Waiting for database server to accept connections"
while ! ${prog} >/dev/null 2>&1
do
timeout=$(expr $timeout - 1)
if [ $timeout -eq 0 ]; then
echo -e "nCould not connect to database server. Aborting..."
exit 1
fi
echo -n "."
sleep 1
done
● コンテナから DBMS を同時に起動した場
合に、 DBMS の起動を待つ必要あり](https://image.slidesharecdn.com/buildingproductionondocker-150411035700-conversion-gate01-180407053020/75/Building-production-server-on-docker-19-2048.jpg)