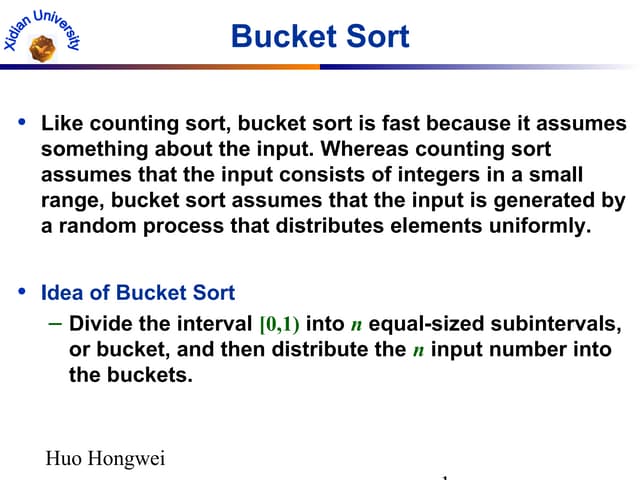
The document discusses non-comparison based sorting algorithms, specifically focusing on bucket sort. It explains the working mechanism, complexities, and various applications of bucket sort, such as in image processing and nearest-neighbor searches. Additionally, it compares its performance with traditional sorting methods and outlines literature findings on the topic.








![ALGORITHM
1. n length[A]
2. for i 1 to n
3. do insert A[i] into bucket B[nA[i]]
4. for i 0 to n-1
5. do sort bucket B[i] with insertion sort
6. Concatenate bucket B[0],B[1],…,B[n-1]](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-11-320.jpg)
![COMPLEXITY
1. n length[A] (1)
2. for i 1 to n O(n)
3. do insert A[i] into bucket B[nA[i]] (1) (i.e. total
O(n))
4. for i 0 to n-1 O(n)
5. do sort bucket B[i] with insertion sort O(ni
2) (i=0
n-1
O(ni
2))
6. Concatenate bucket B[0],B[1],…,B[n-1] O(n)
Where ni is the size of bucket B[i]](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-12-320.jpg)

![AVERAGE CASE
• In average case running time of bucketsort is
T(n) = (n) + i=0
n-1 O(ni
2)
E[T(n)] = E[(n) + i=0
n-1 O(ni
2)]
= (n)+ i=0
n-1 E[O(ni
2)] (by linearity of expectation)
= (n)+ i=0
n-1 O (E[ni
2])
• So, the average complexity is O(n+k).](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-14-320.jpg)





![MEDIAN FILTER
The filter Median is often used for primary images pro-
cessing.
It does not blur edges.
The median filter is non-linear.
Means that if two images are summed-up and the
result image is median filtered, the processed image is
different from the sum of these two images processed
with filter median.
median[A(x) + B(x)] ≠ median[A(x)] + median[B(x)]](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-20-320.jpg)



![for( i=0; i<3; i++ )
for( j=0; j<3; j++ )
{ // Writing how many times
colour[pixel[i][j]]++; // value of the massif pixel [3][3], in the relevant
} //elements of the massif colour [256].
sum = 0;
for( k=0; k<256; k++ )
{
median = k;
if(colour [k]!=0 )
{
sum = sum + colour[k]]; // Summing-up the non-zero values of colour
if( sum>=5 ) // If the sum is >= 5 we write in the
break; // pixel[1][1] the value of the median.
}
}
pixel[1][1] = median;
ALGORITHM :](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-24-320.jpg)

![int index=255;
for( i=0; i<3; i++ )
for( j=0; j<3; j++ )
{ // Writing the number of times every
colour[pixel[i][j]]++; // value of the massif pixel[3][3]is met
if (pixel[i][j]<index)
index = pixel[i][j]; // Writing the index of the most dark colour
}
sum = 0;
for( k=index; k<256; k++ ) // The survey of the massif colour starts from
{
median = k; // position index
if(colour [k]!=0 )
{ // Summing-up the non-zero values of colour
sum = sum + colour[k]];
if( sum>=5 ) // When the sum is >= 5, we write
break; // in the pixel[1][1] the value of the median.
}
}
pixel[1][1] = median;
ALGORITHM :](https://image.slidesharecdn.com/presentationofca-161005074820/85/Bucket-sort-A-Noncomparision-Algorithm-26-320.jpg)




























































![UNIT V Searching Sorting Hashing Techniques [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/unitvsearchingsortinghashingtechniquesautosaved-241014040608-74caa0f6-thumbnail.jpg?width=640&height=640&fit=bounds)



















