Downloaded 57 times
![Breadth-first searching[1]
A breadth-first search (BFS)
explores nodes nearest the root
before exploring nodes further
away
For example, after searching A,
then B, then C, the search
proceeds with D, E, F, G
Node are explored in the order
A B C D E F G H I J K L M N O P Q
J will be found before N
L M N O P
G
Q
H JI K
FED
B C
A](https://image.slidesharecdn.com/bsccs-iidfsu-3treeandgraph-150317031647-conversion-gate01/75/Bsc-cs-ii-dfs-u-3-tree-and-graph-17-2048.jpg)
![Depth-first searching[2]
A depth-first search (DFS)
explores a path all the way to a
leaf before backtracking and
exploring another path
For example, after searching A,
then B, then D, the search
backtracks and tries another path
from B
Node are explored in the order A
B D E H L M N I O P C F G J K
Q
N will be found before JL M N O P
G
Q
H JI K
FED
B C
A](https://image.slidesharecdn.com/bsccs-iidfsu-3treeandgraph-150317031647-conversion-gate01/75/Bsc-cs-ii-dfs-u-3-tree-and-graph-18-2048.jpg)

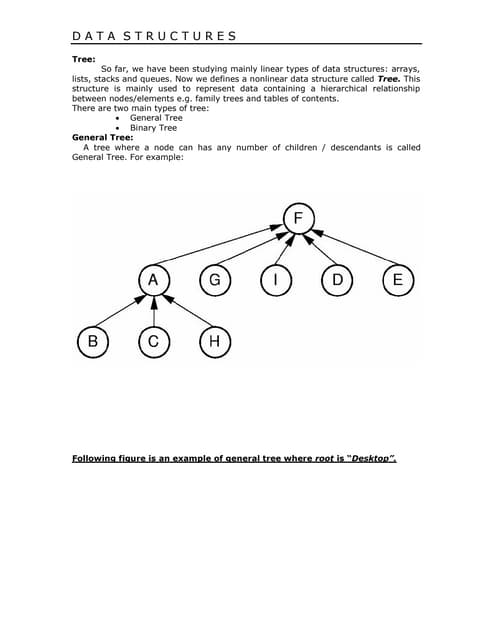
This document discusses nonlinear data structures like trees and graphs. It defines trees and graphs, and notes that all trees are graphs but not all graphs are trees. It then describes different types of trees like binary trees, binary search trees, and n-ary trees. It also covers graph concepts like directed and undirected graphs. The document discusses traversing trees using preorder, inorder and postorder traversal and covers graph searching algorithms like breadth-first search and depth-first search.