Downloaded 216 times
![Augmented Reality Definition
Defining Characteristics [Azuma 97]
Combines Real and Virtual Images
- Both can be seen at the same time
Interactive in real-time
- The virtual content can be interacted with
Registered in 3D
- Virtual objects appear fixed in space](https://image.slidesharecdn.com/billinghurstvienna2012-120706094202-phpapp01/75/Natural-Interfaces-for-Augmented-Reality-3-2048.jpg)











The document discusses the evolution and various types of augmented reality (AR) interfaces, highlighting their definitions, characteristics, and interaction methods. It explores mobile, web-based, and tangible interfaces, emphasizing the integration of natural interactions, gesture recognition, and multimodal input. The potential for intelligent interfaces and future research opportunities in AR technology is also presented.
Overview of natural interfaces in augmented reality by Mark Billinghurst from HIT Lab NZ.
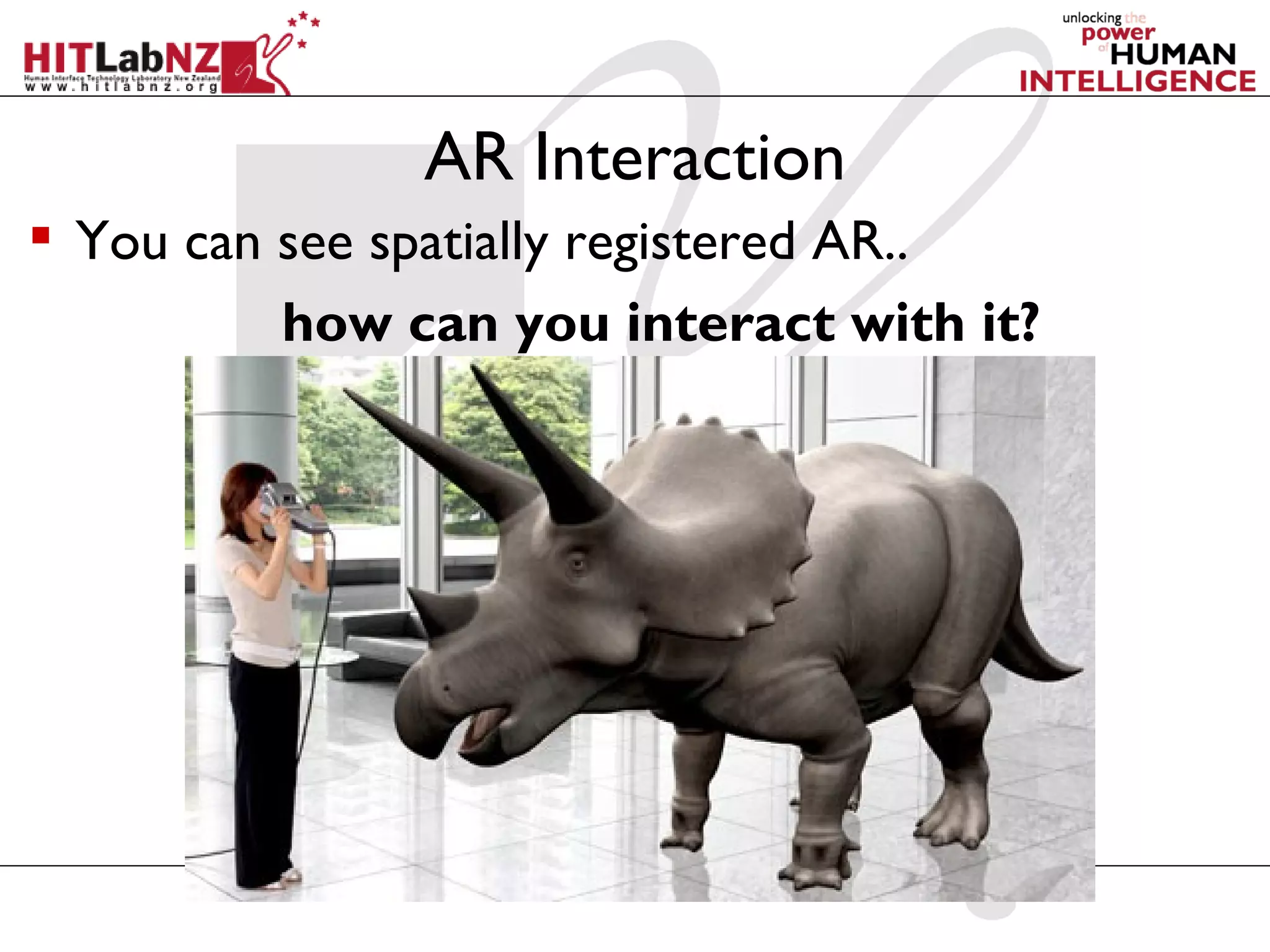
Augmented reality (AR) combines real and virtual images interactively in 3D with real-time registration.
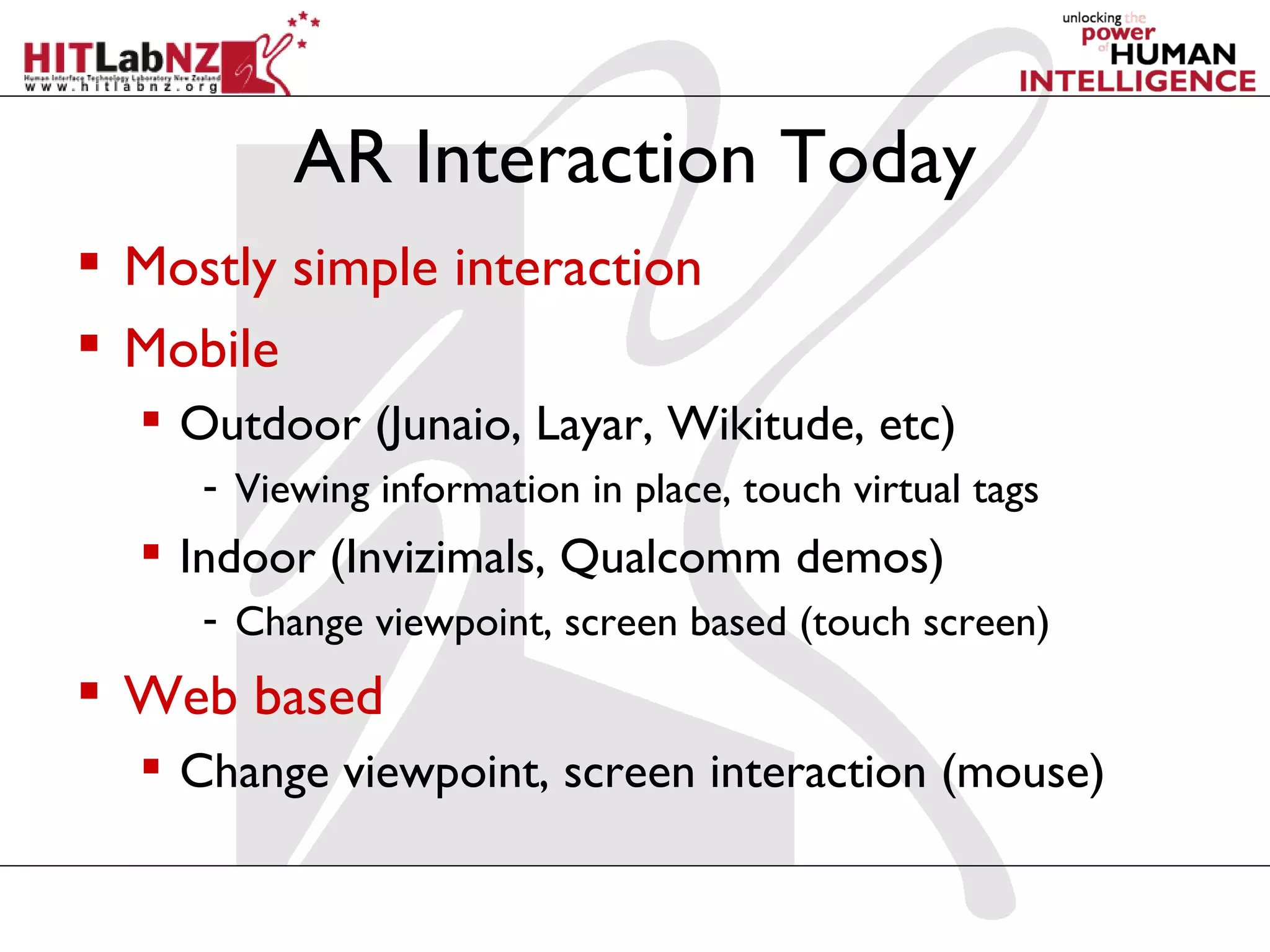
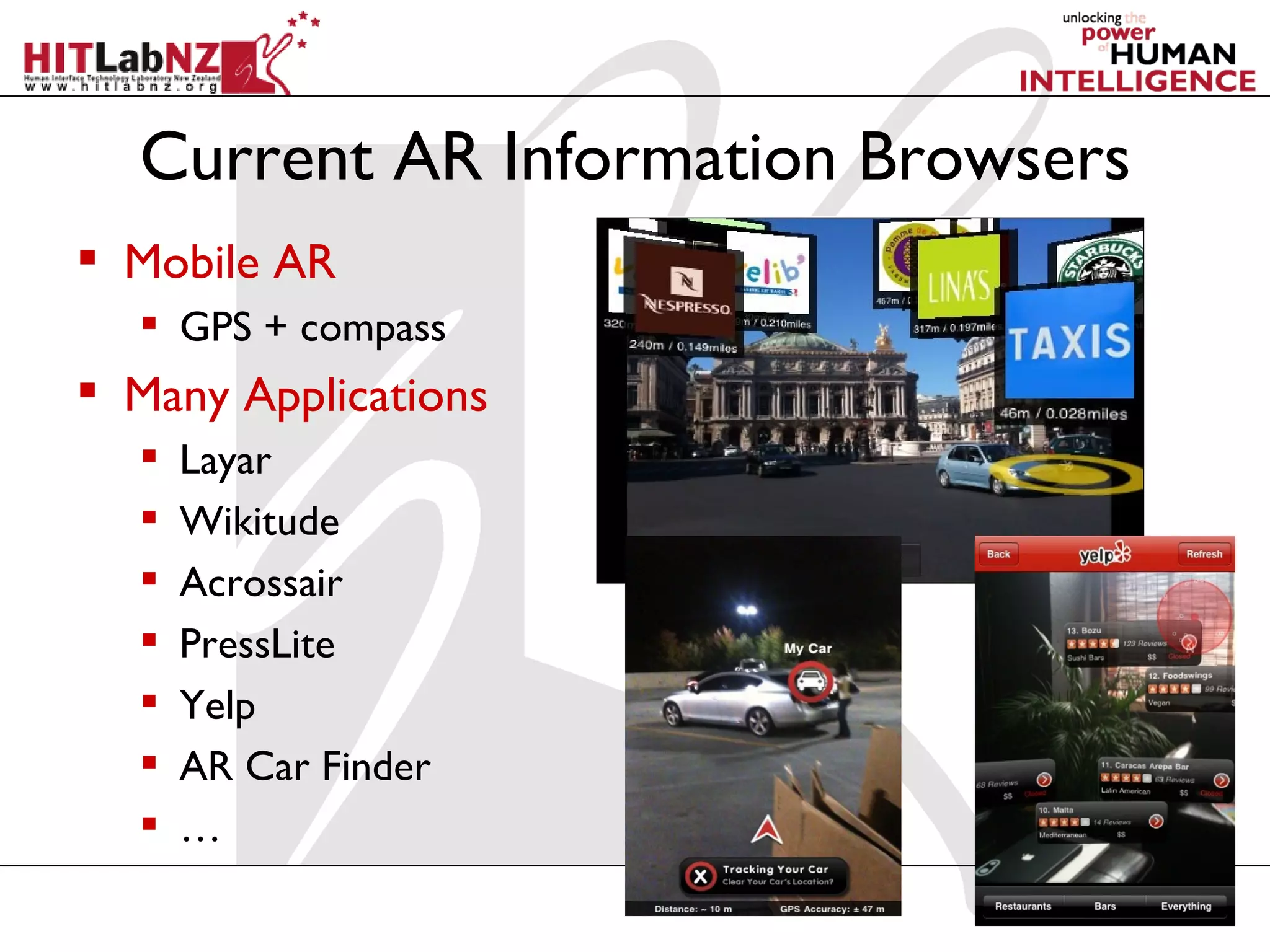
Mobile AR dominates, with applications like Layar (10M+ users) and web-based AR using marker tracking.
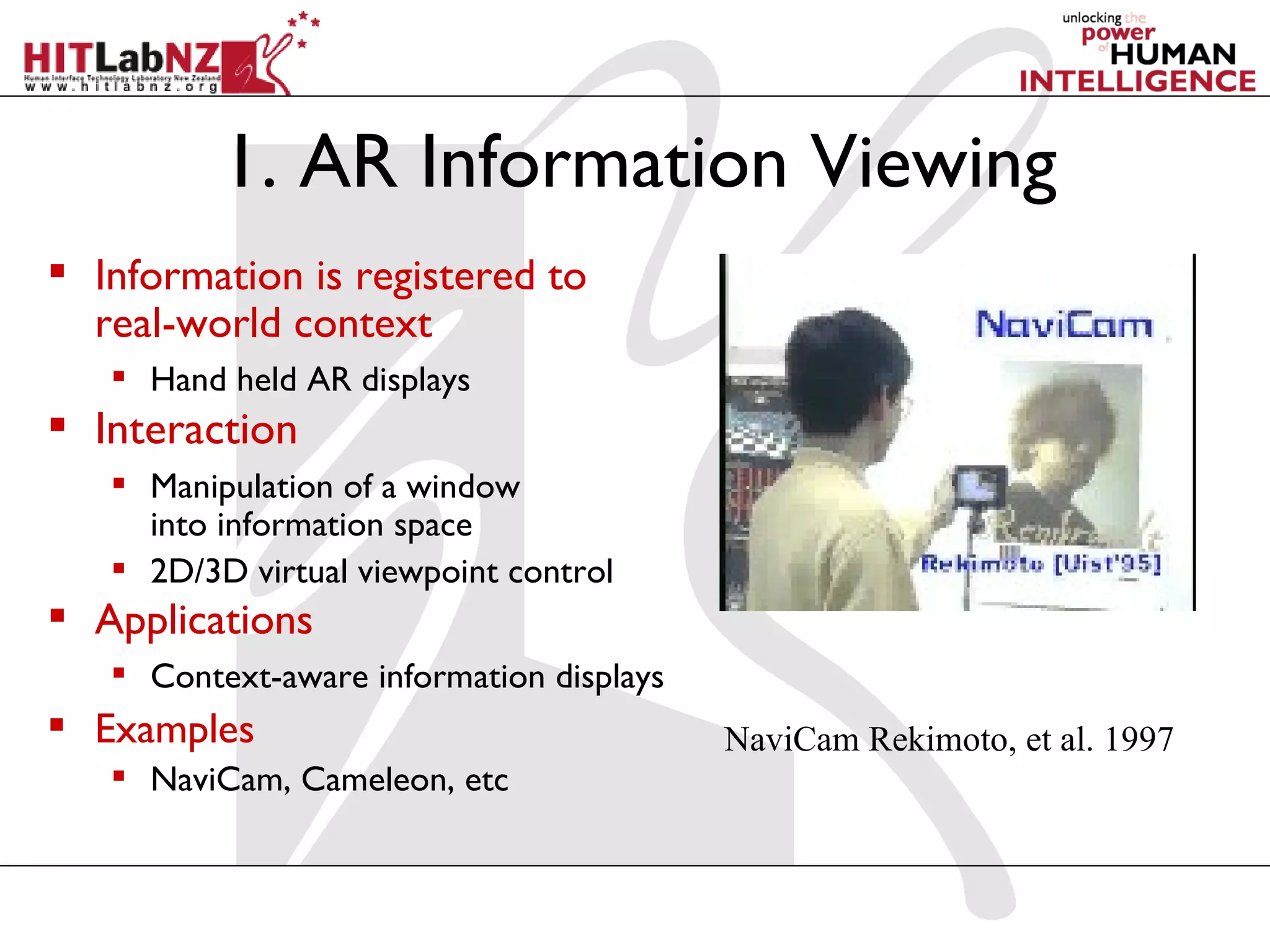
History and evolution of AR interaction, emphasizing context-aware information browsing and mobile AR applications.
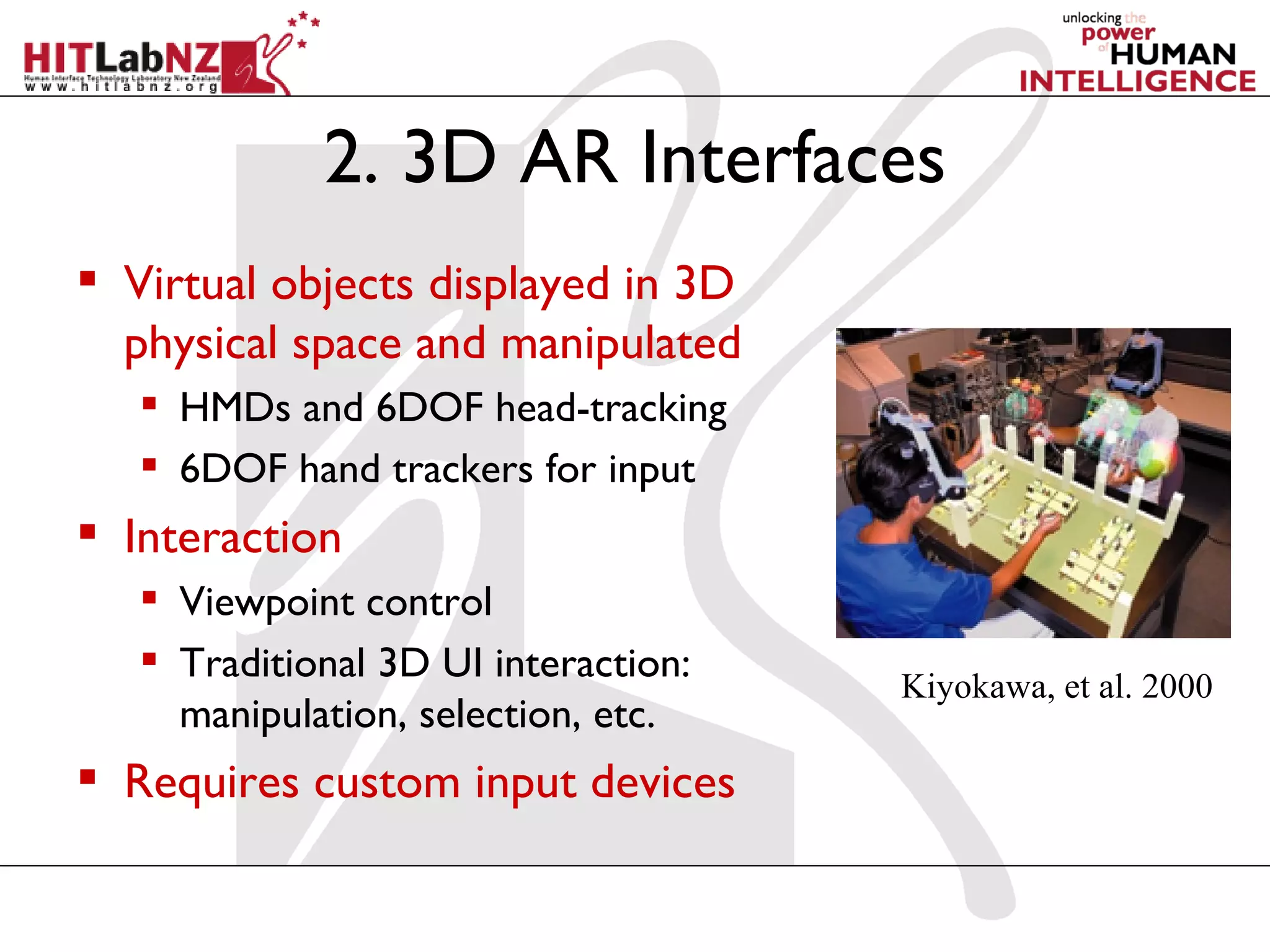
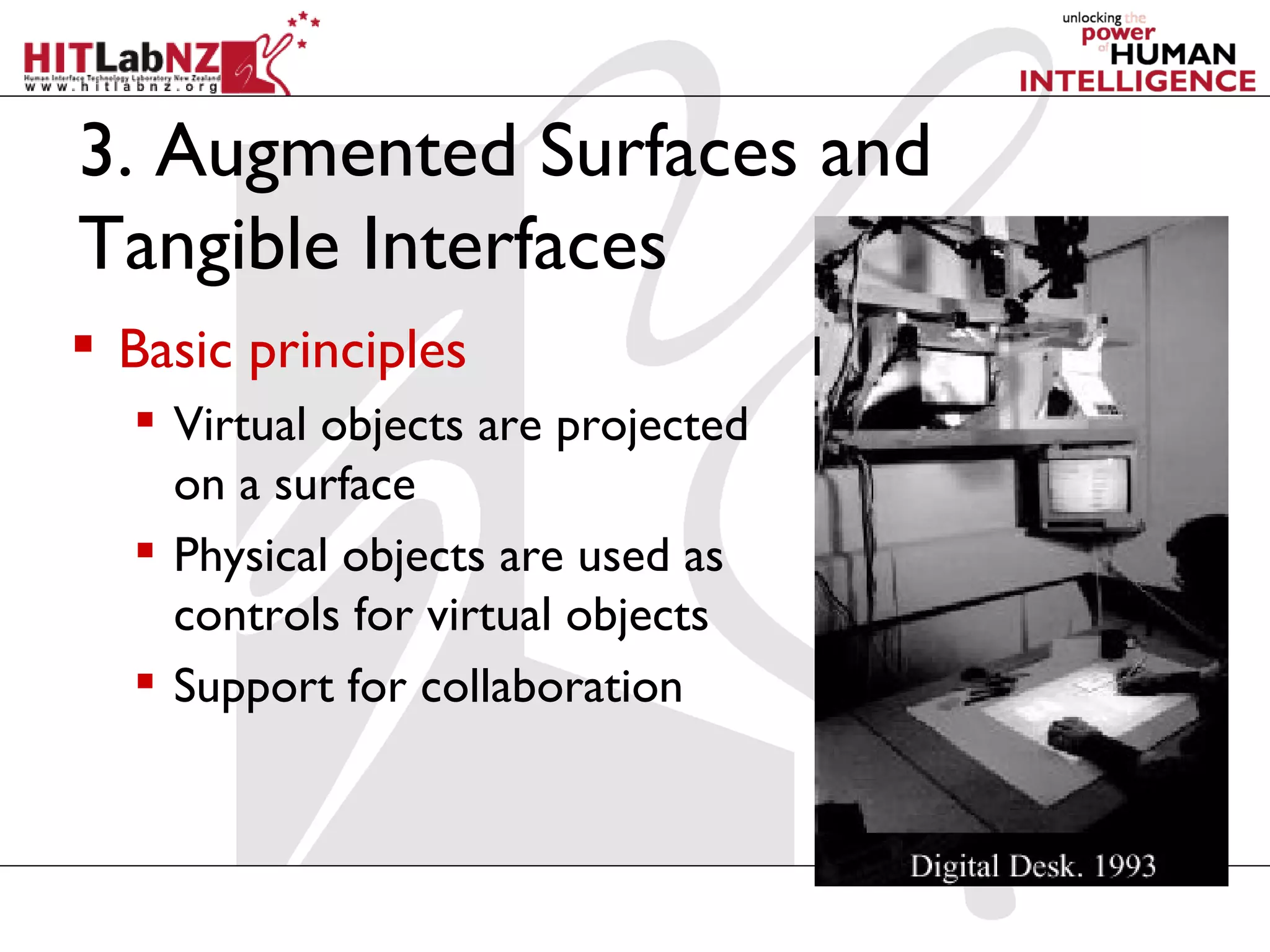
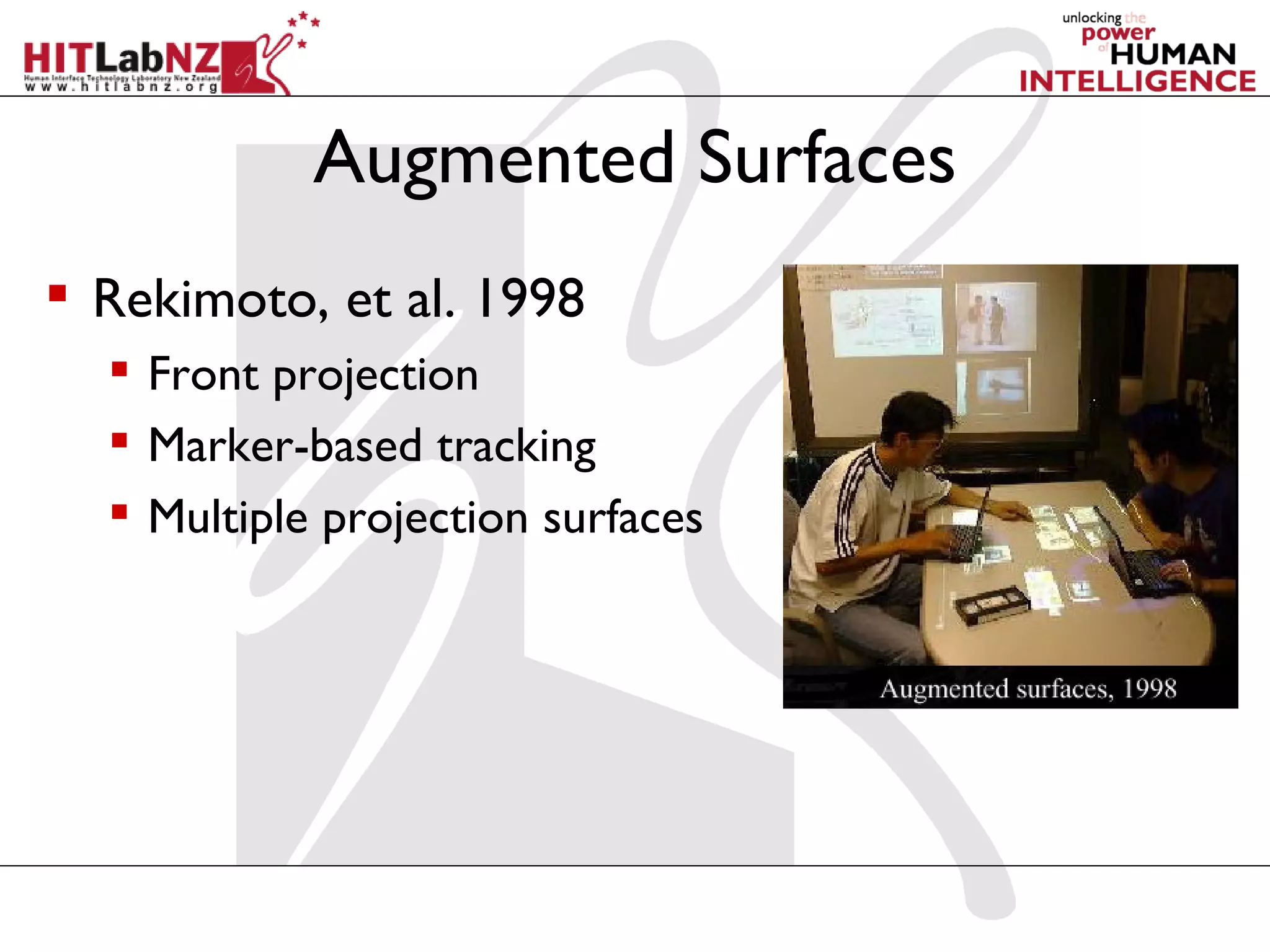
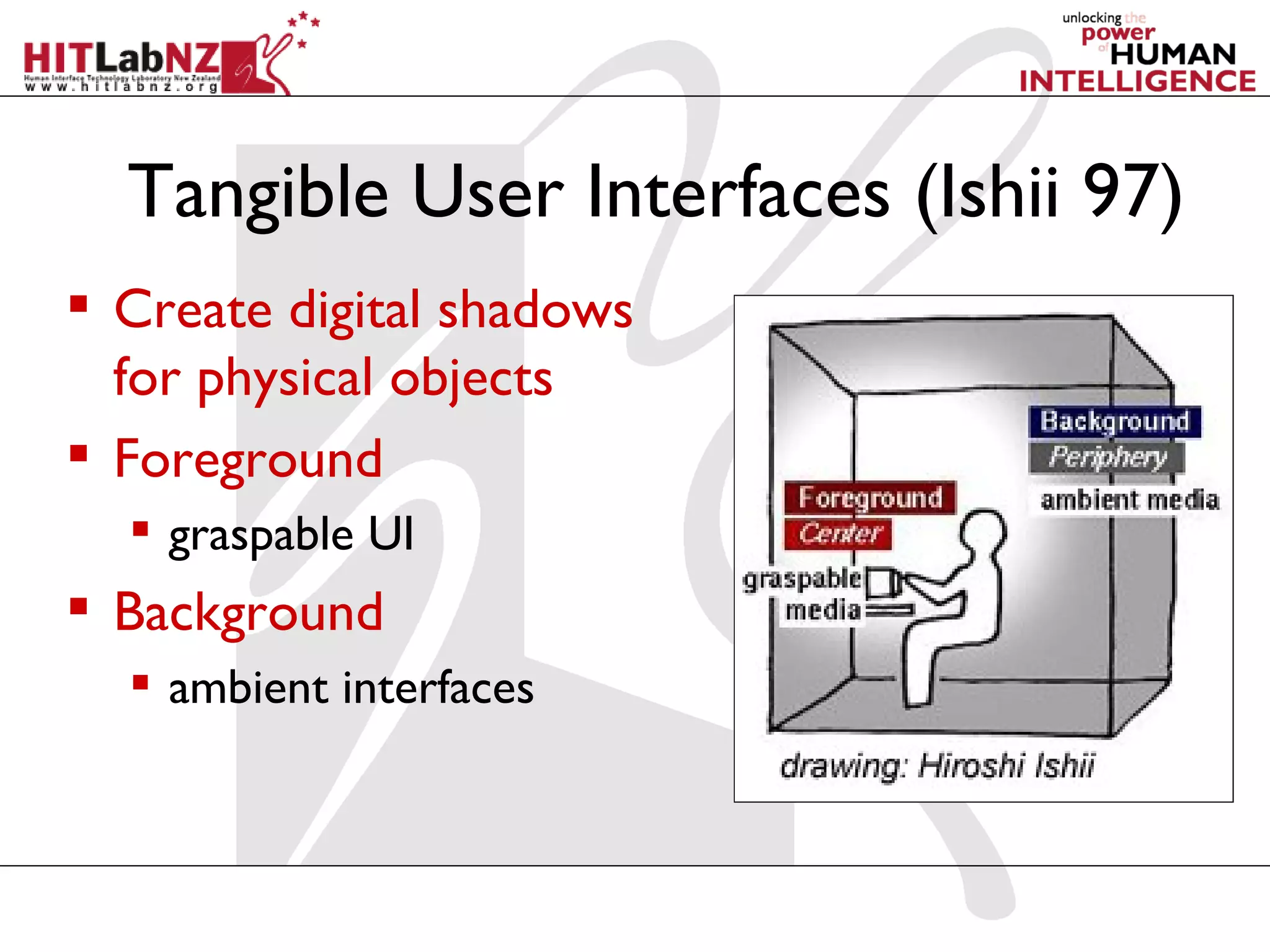
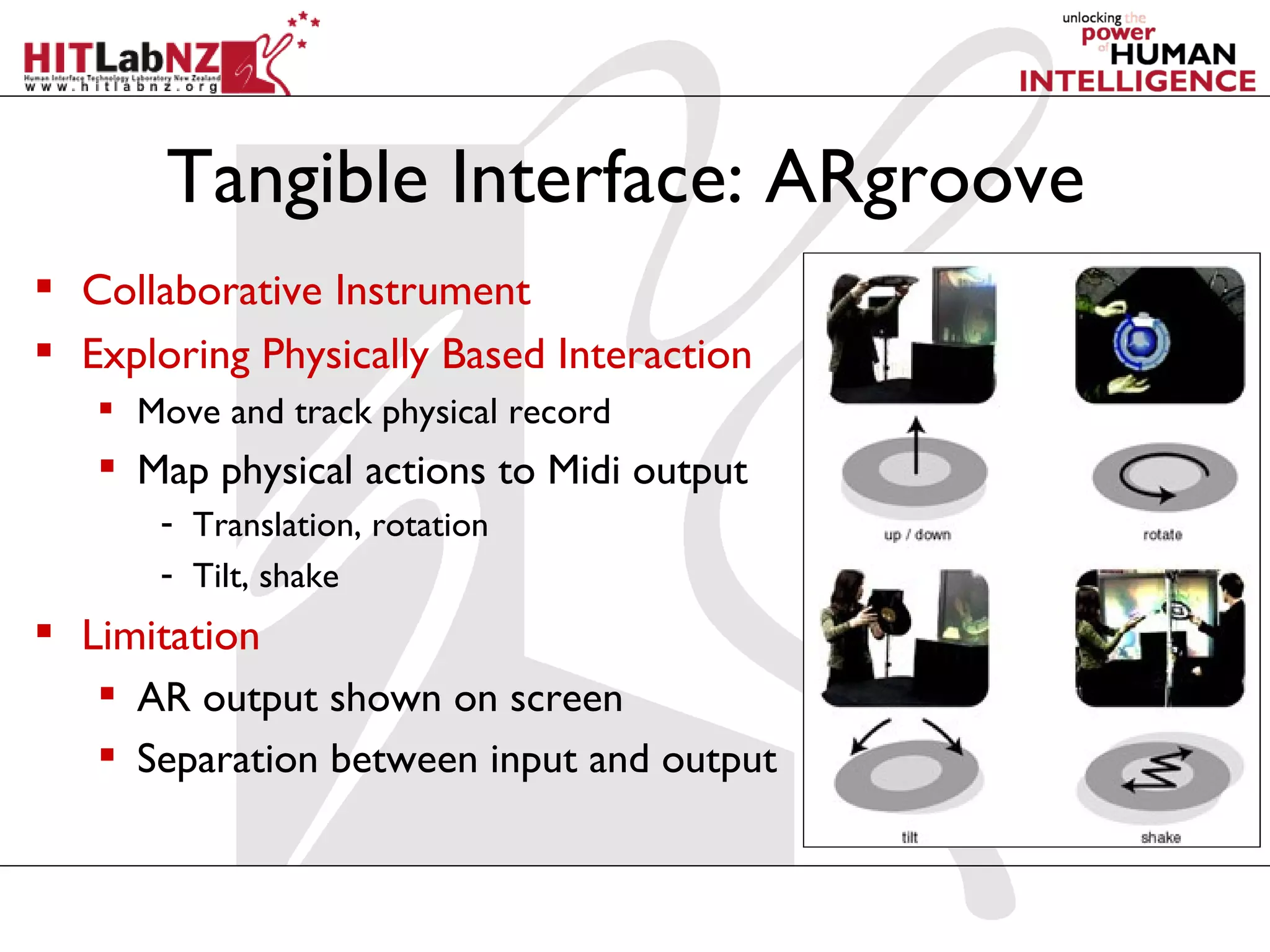
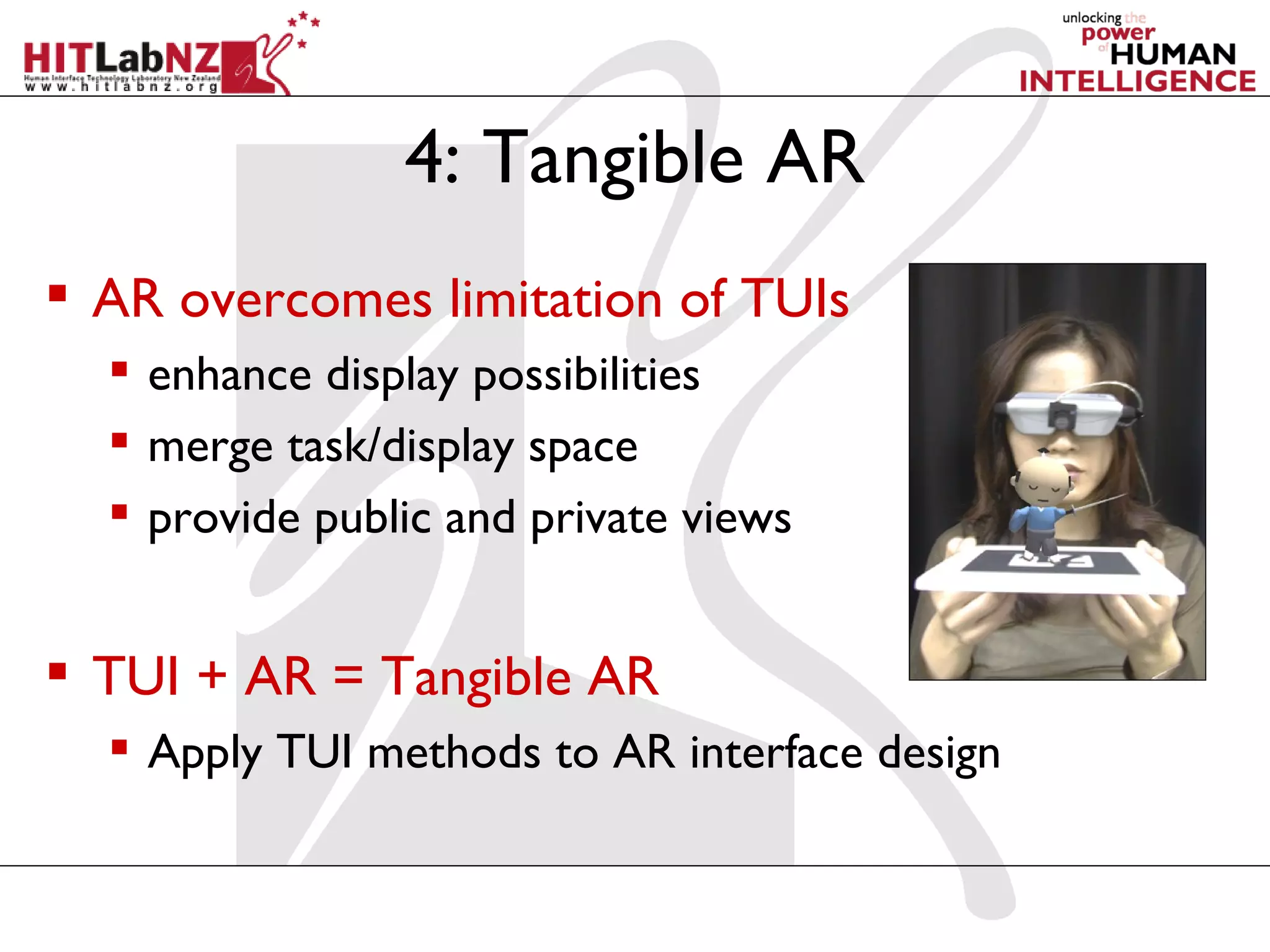
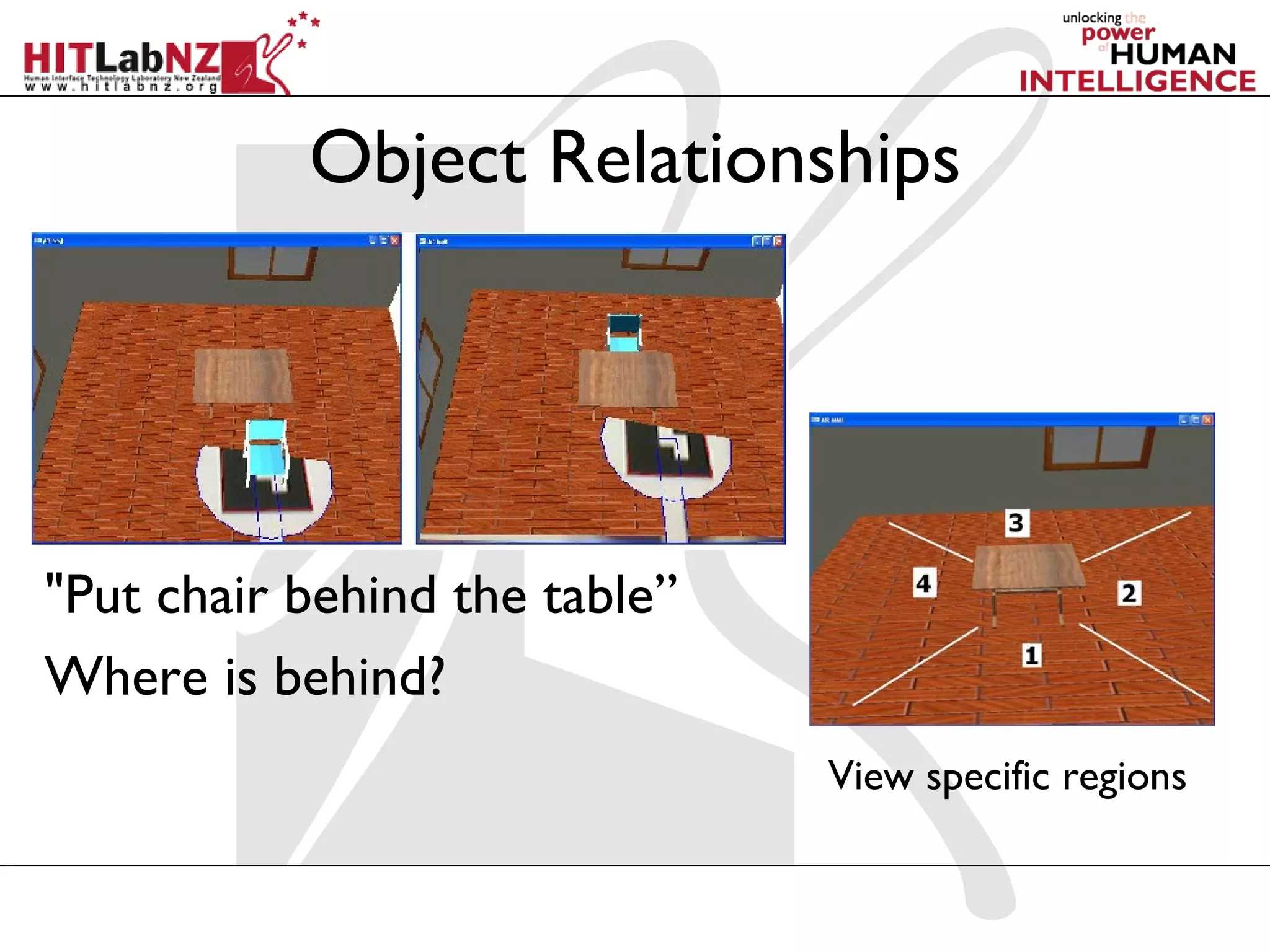
3D displays and tangible user interfaces to manipulate virtual objects with physical controls for collaboration.
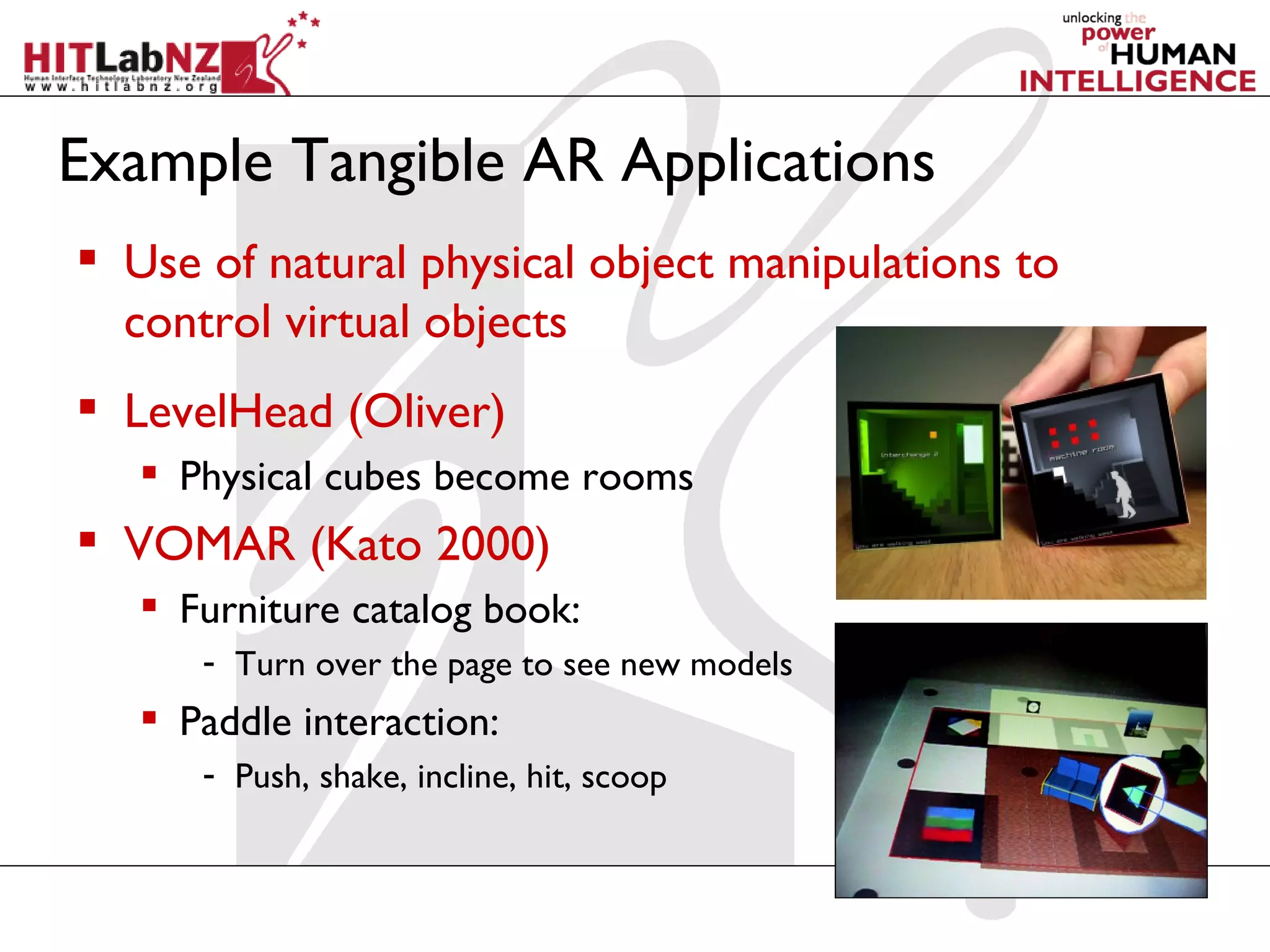
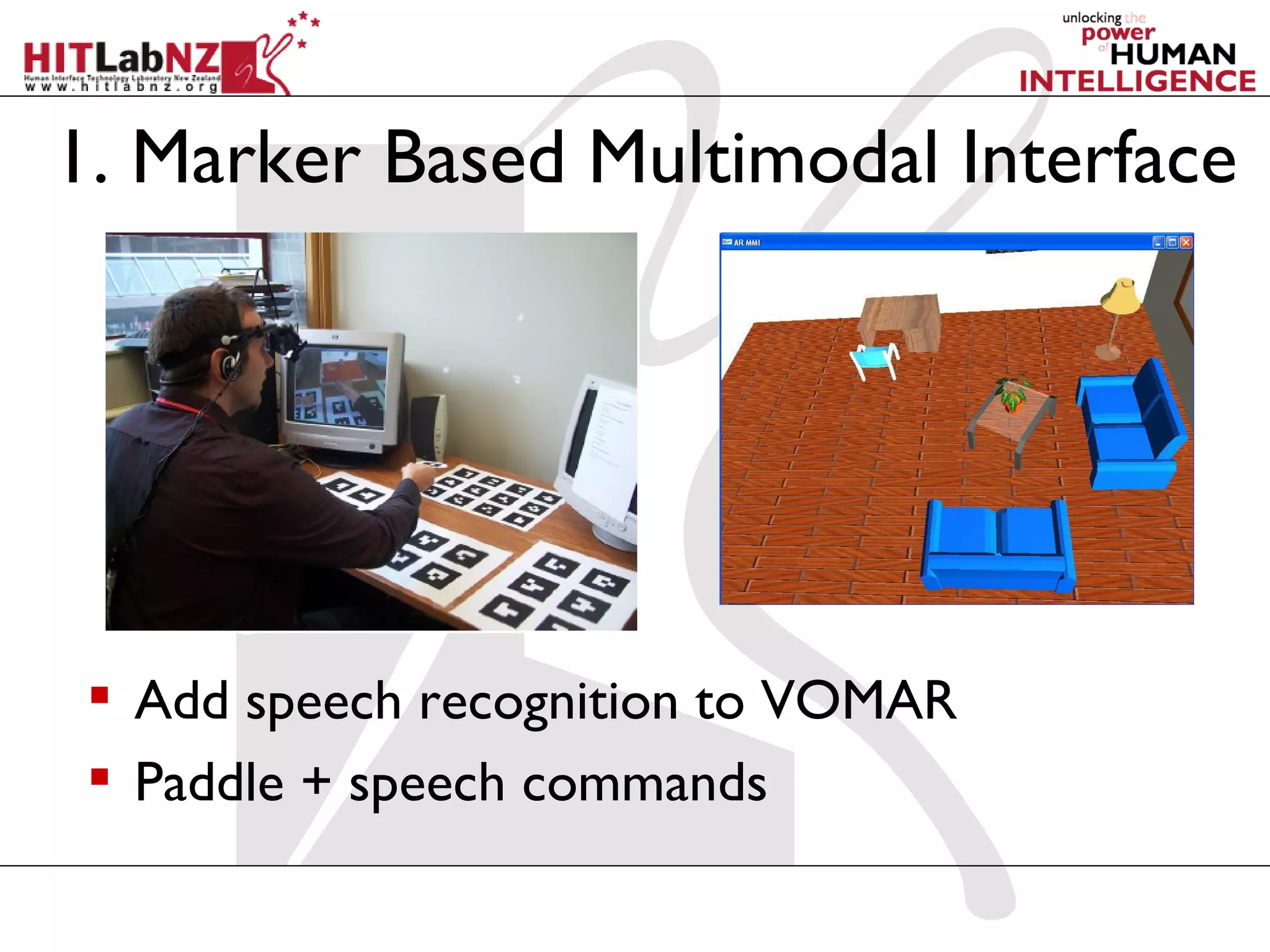
Tangible interfaces enhance interaction by using physical controls with AR, such as in LevelHead and VOMAR applications.
Evolution of AR interaction, highlighting information viewing, 3D interfaces, and ongoing limitations of traditional methods.
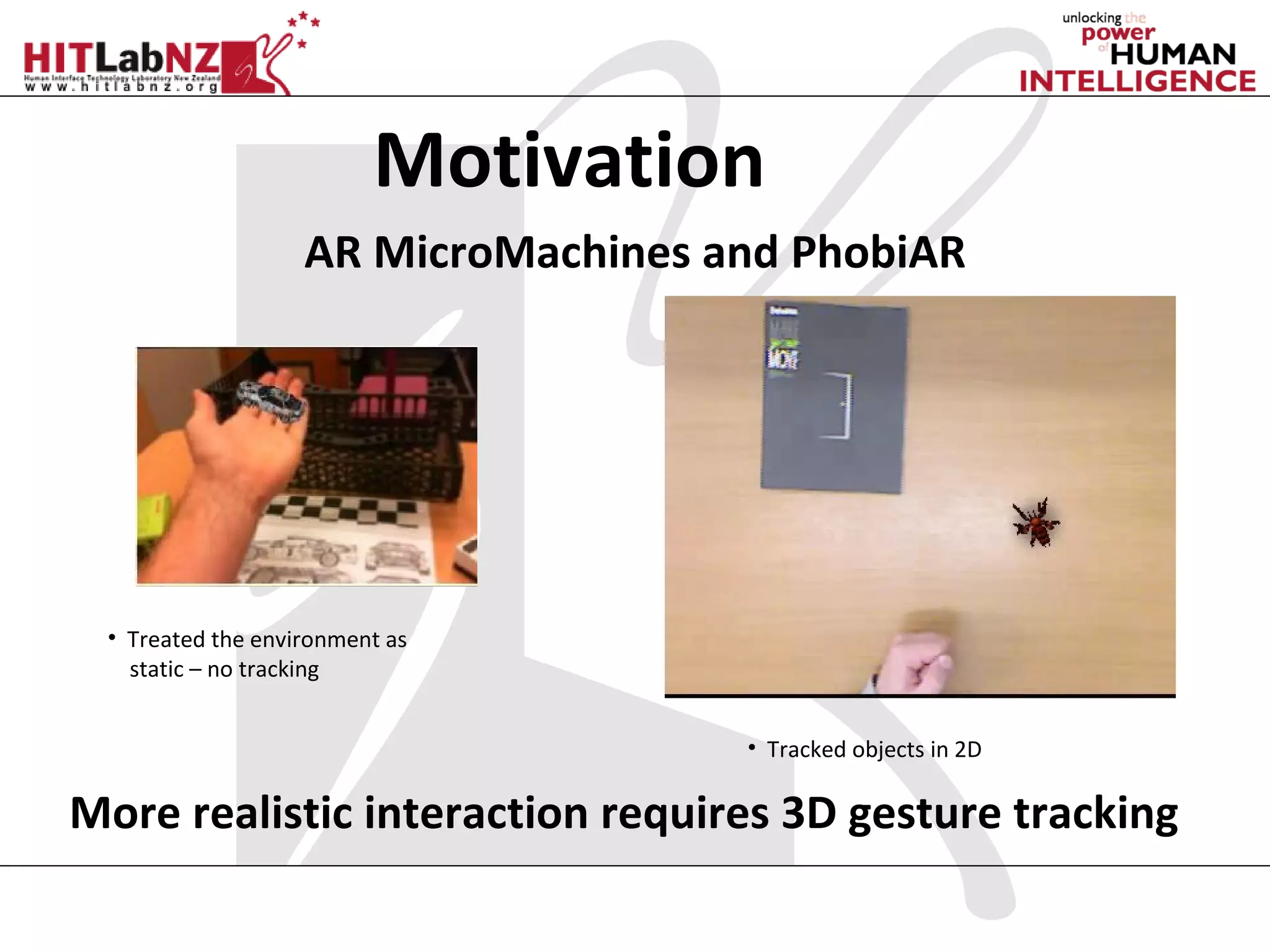
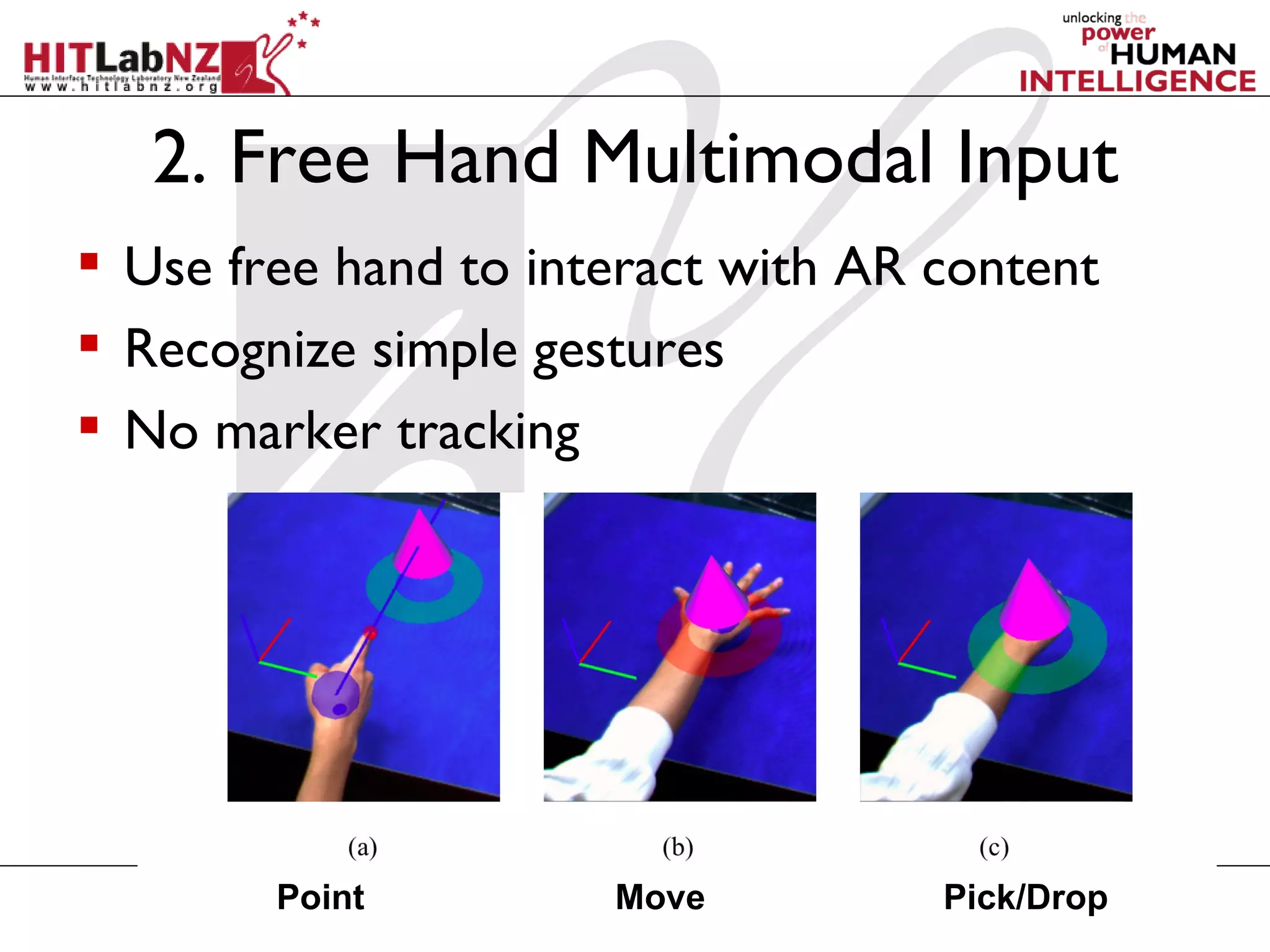
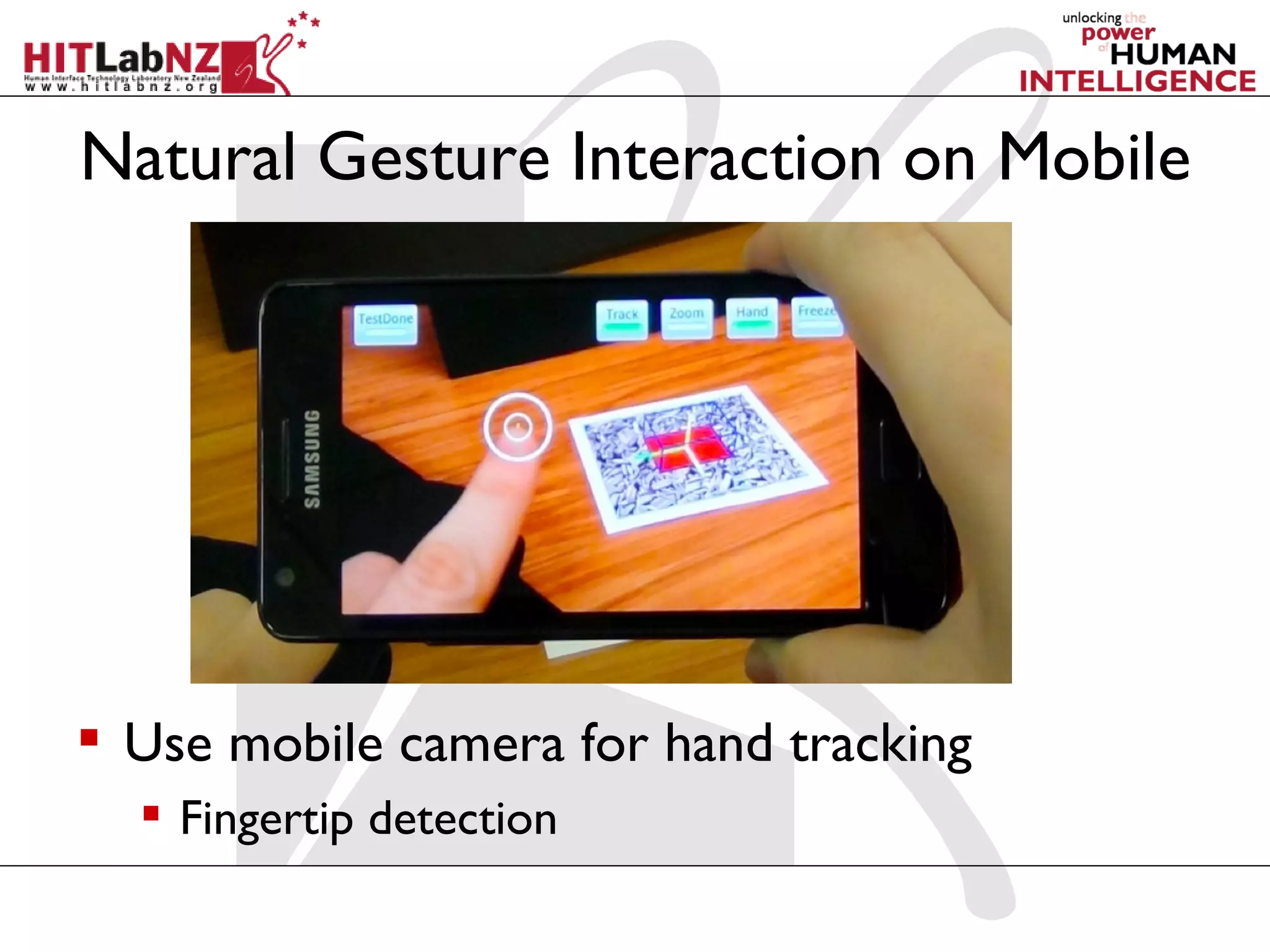
Vision for AR includes natural interaction through environmental awareness and gesture input for intuitive experiences.
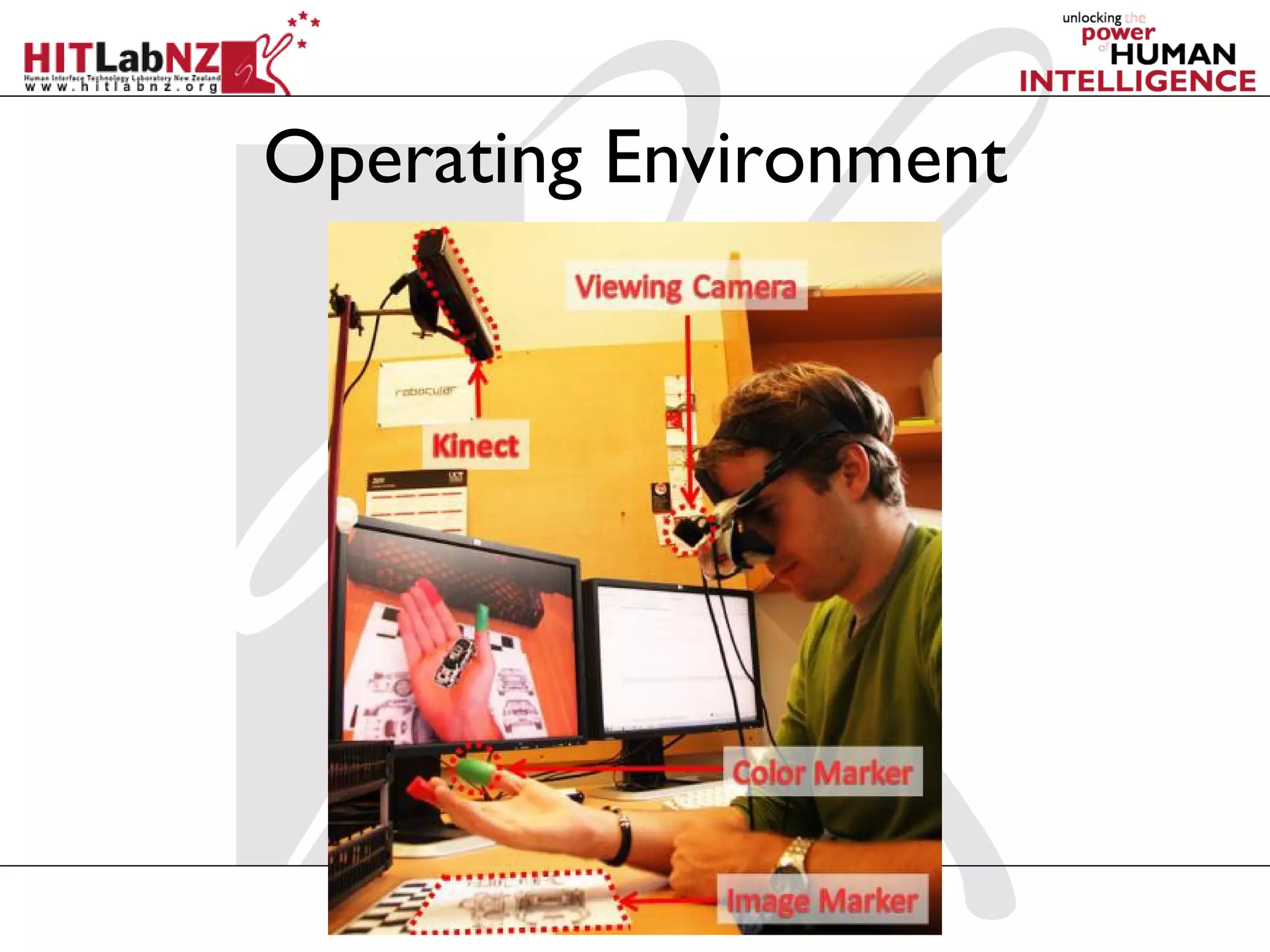
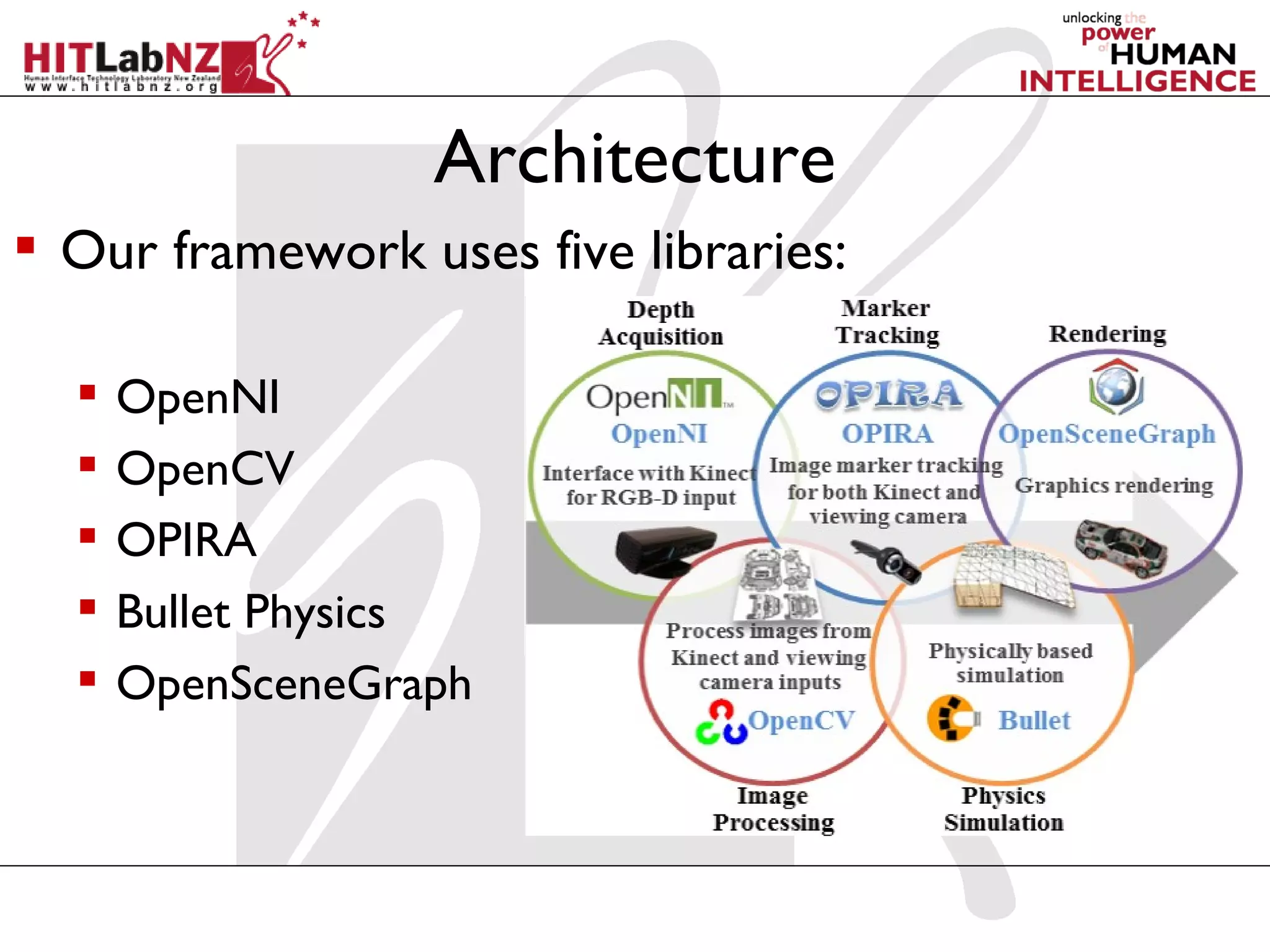
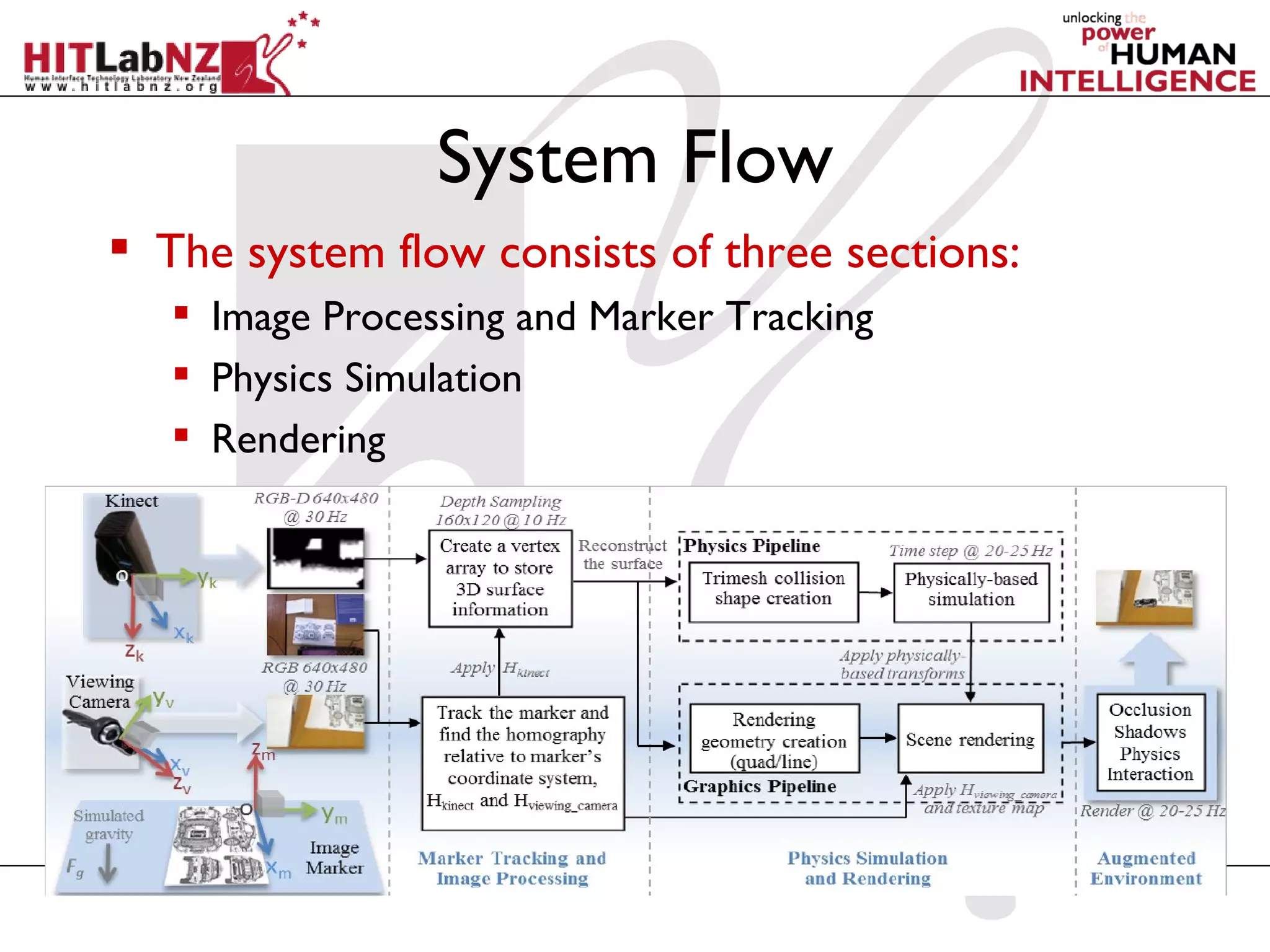
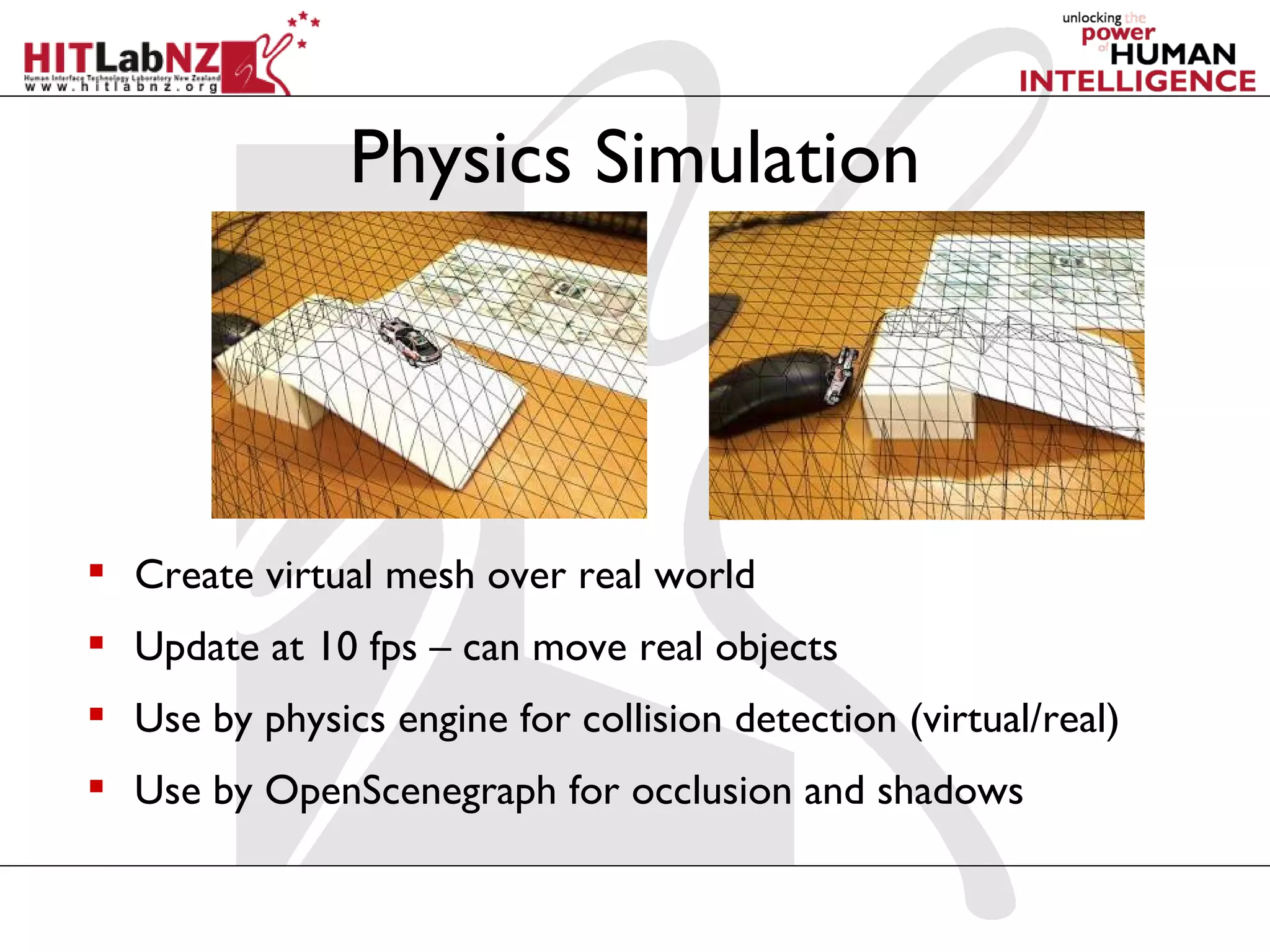
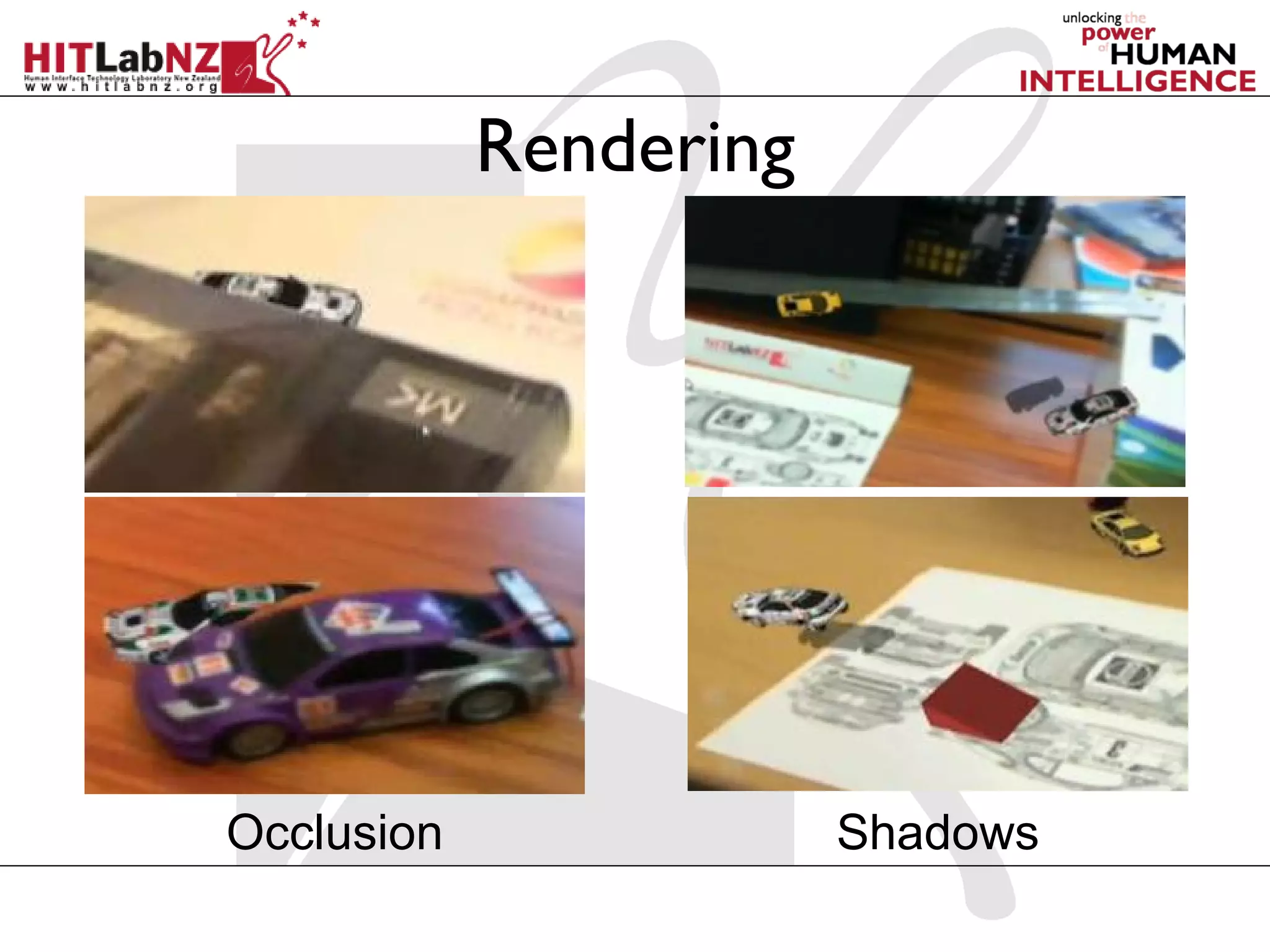
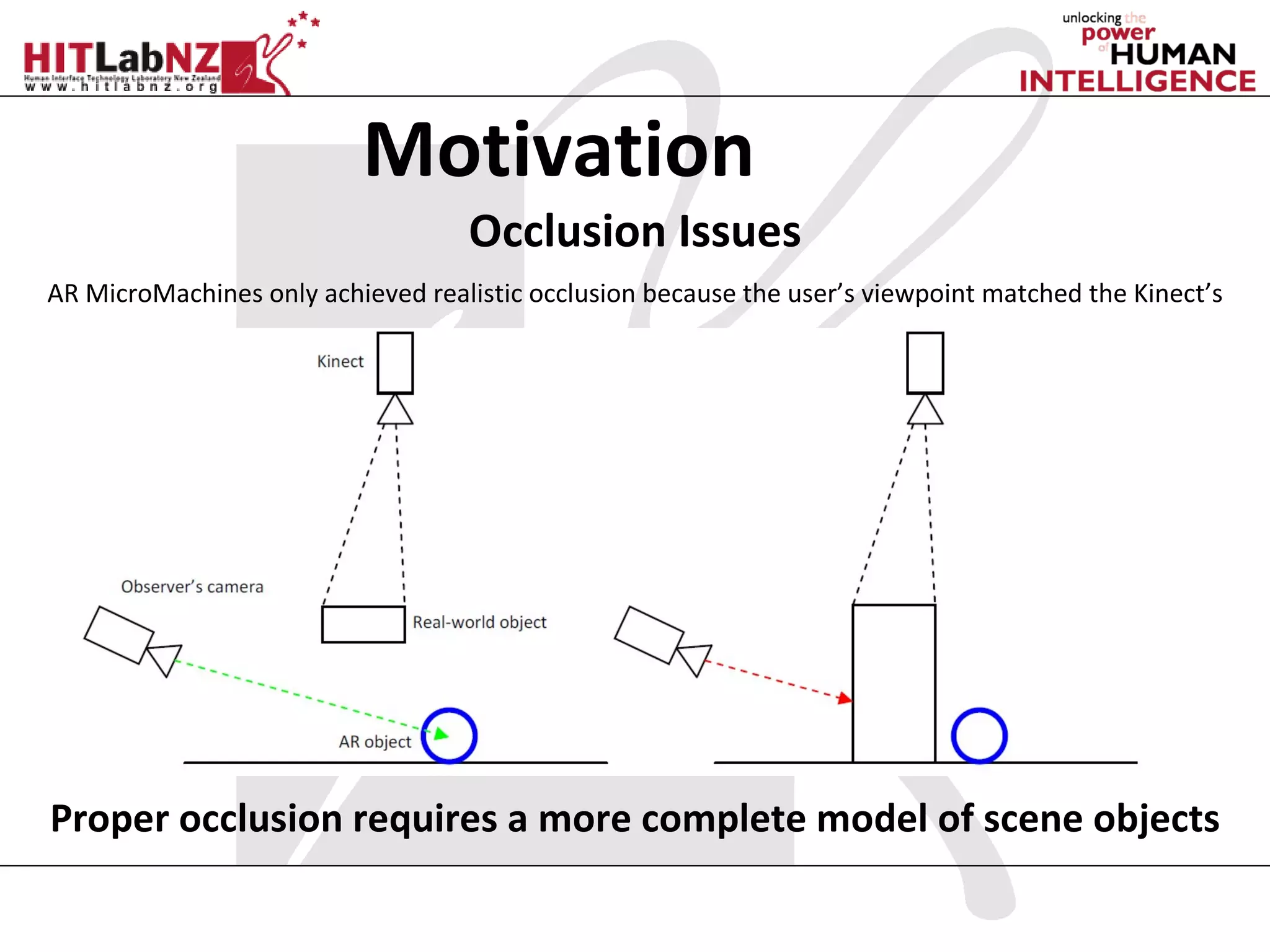
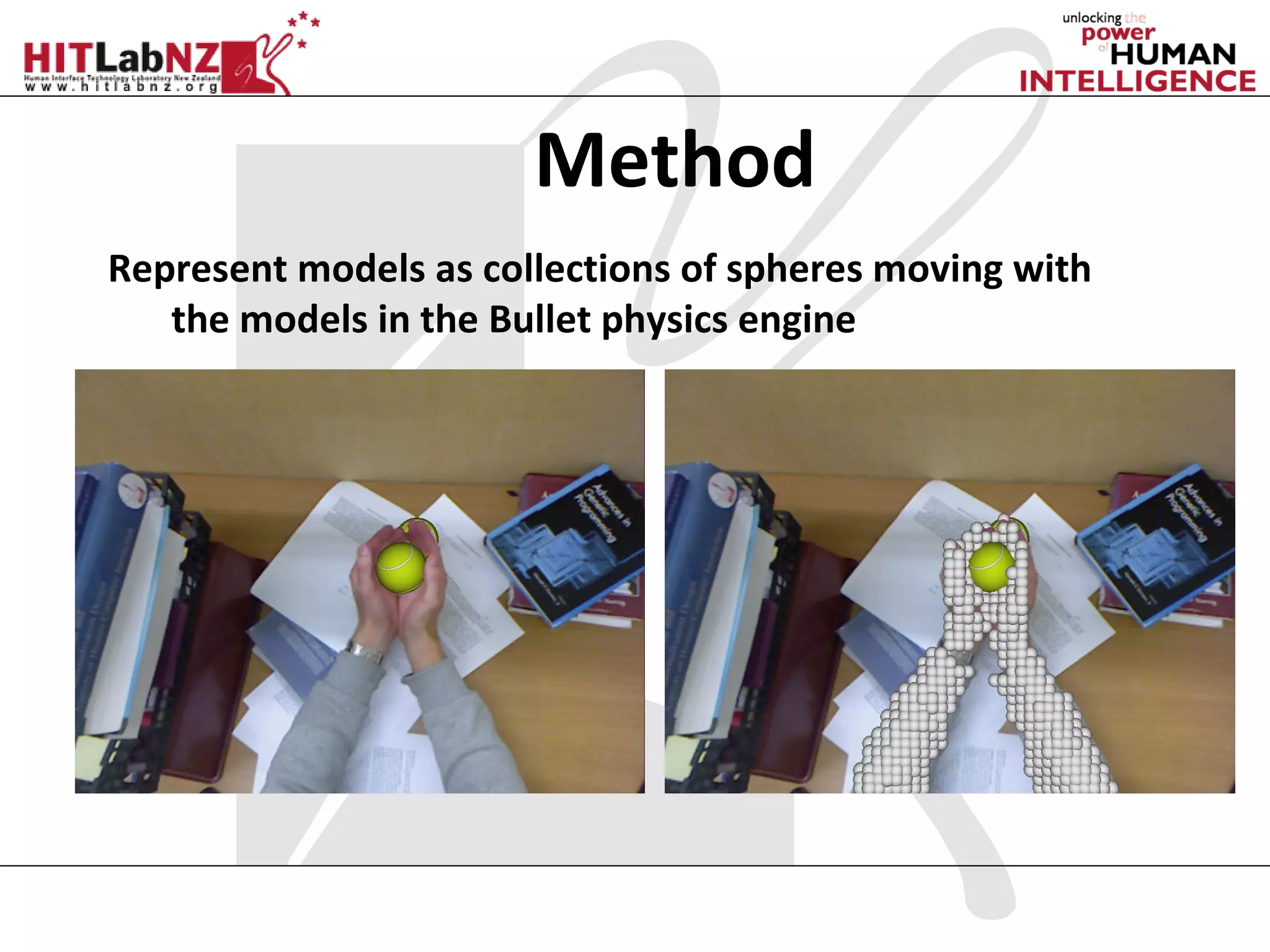
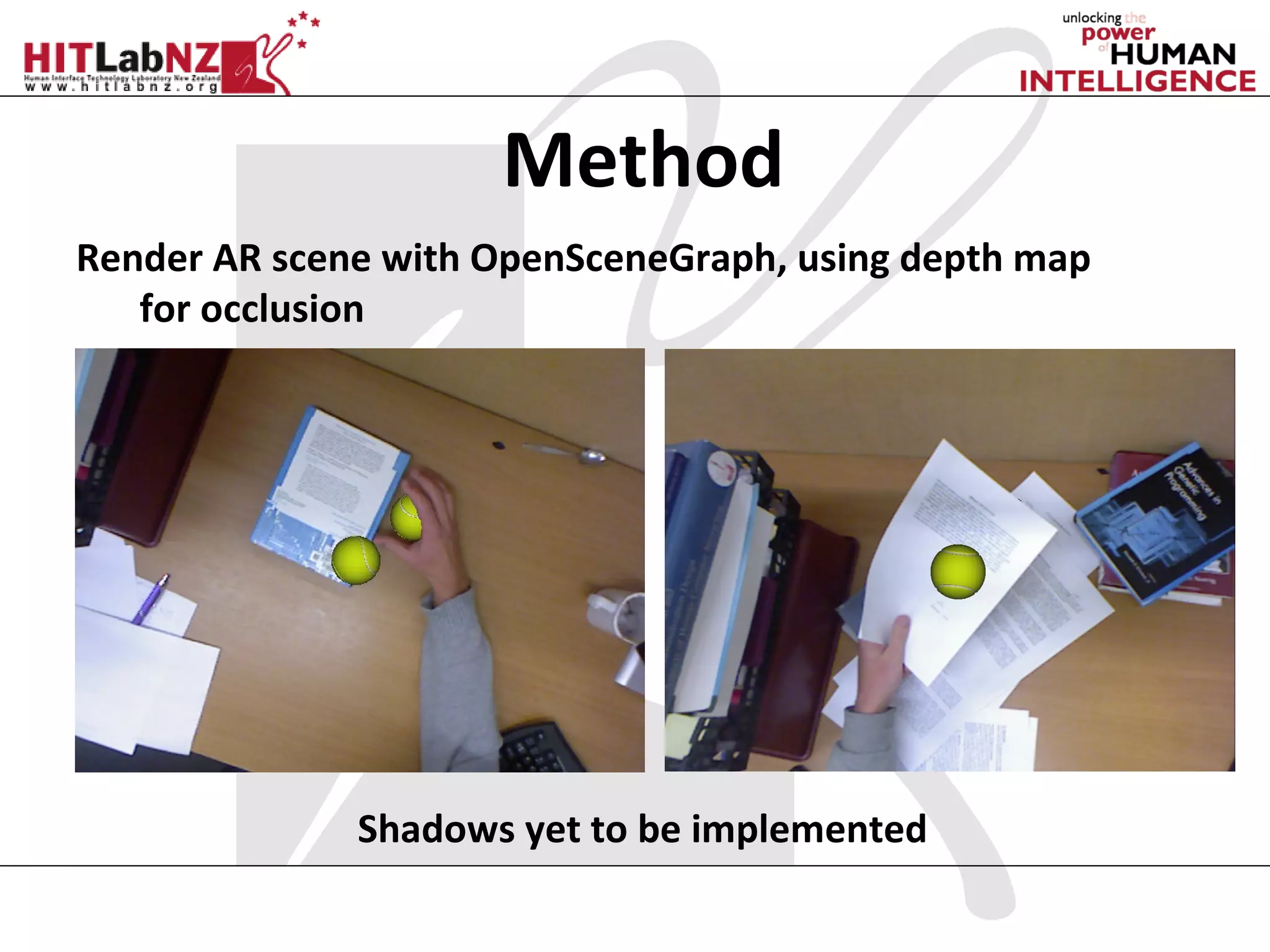
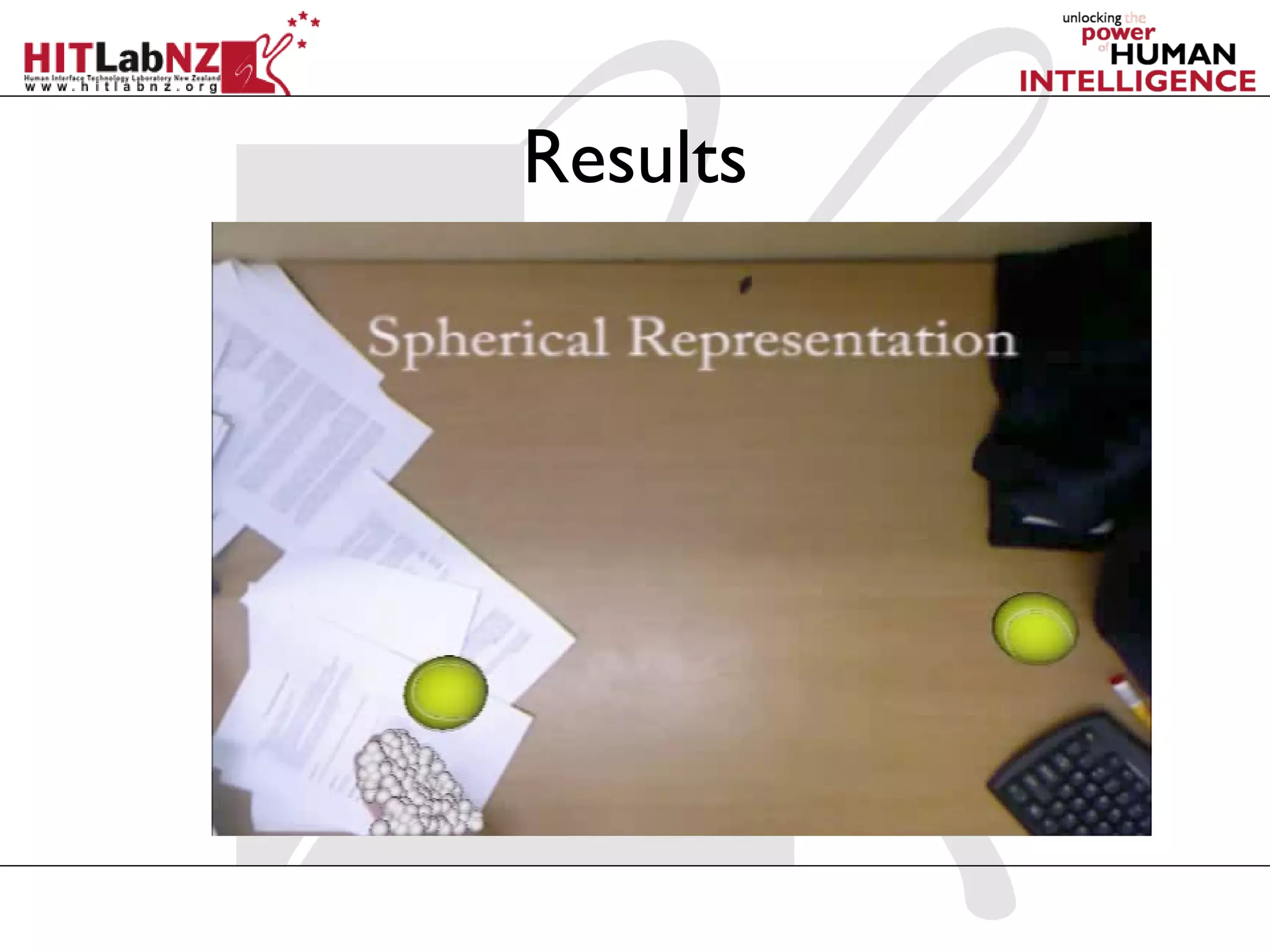
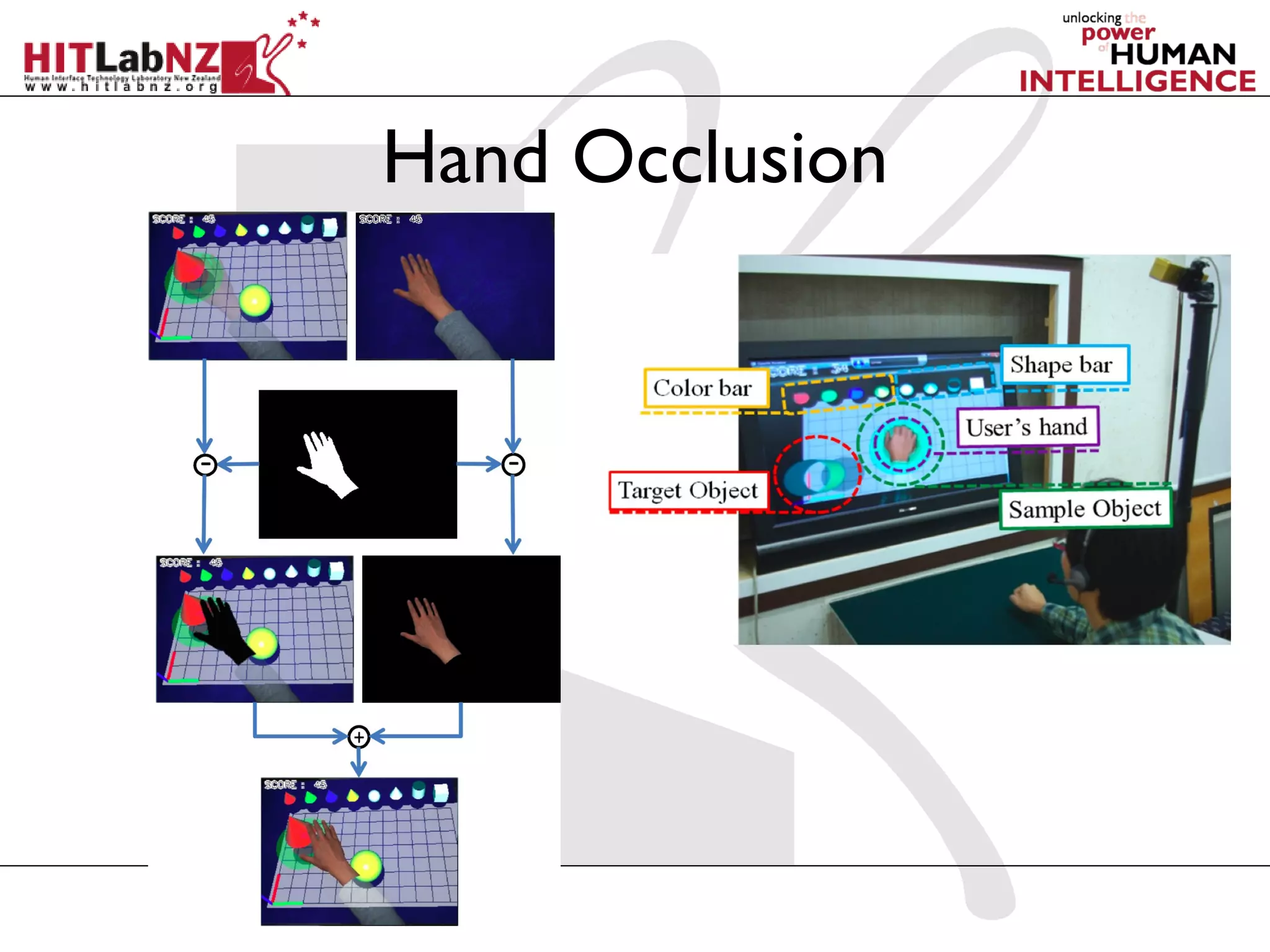
AR MicroMachines utilize environment awareness for realistic physical interactions, focusing on occlusion and physics simulation.
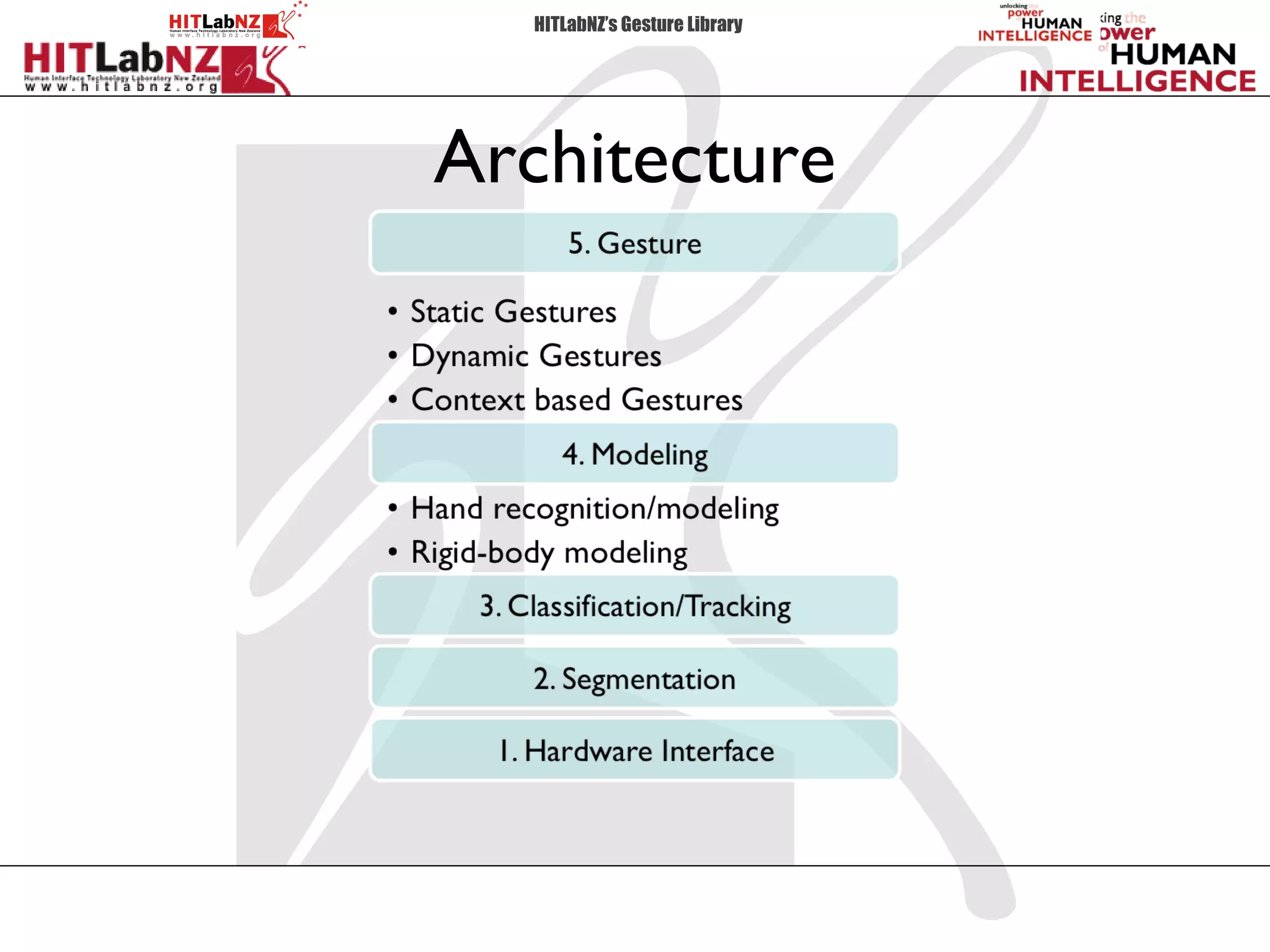
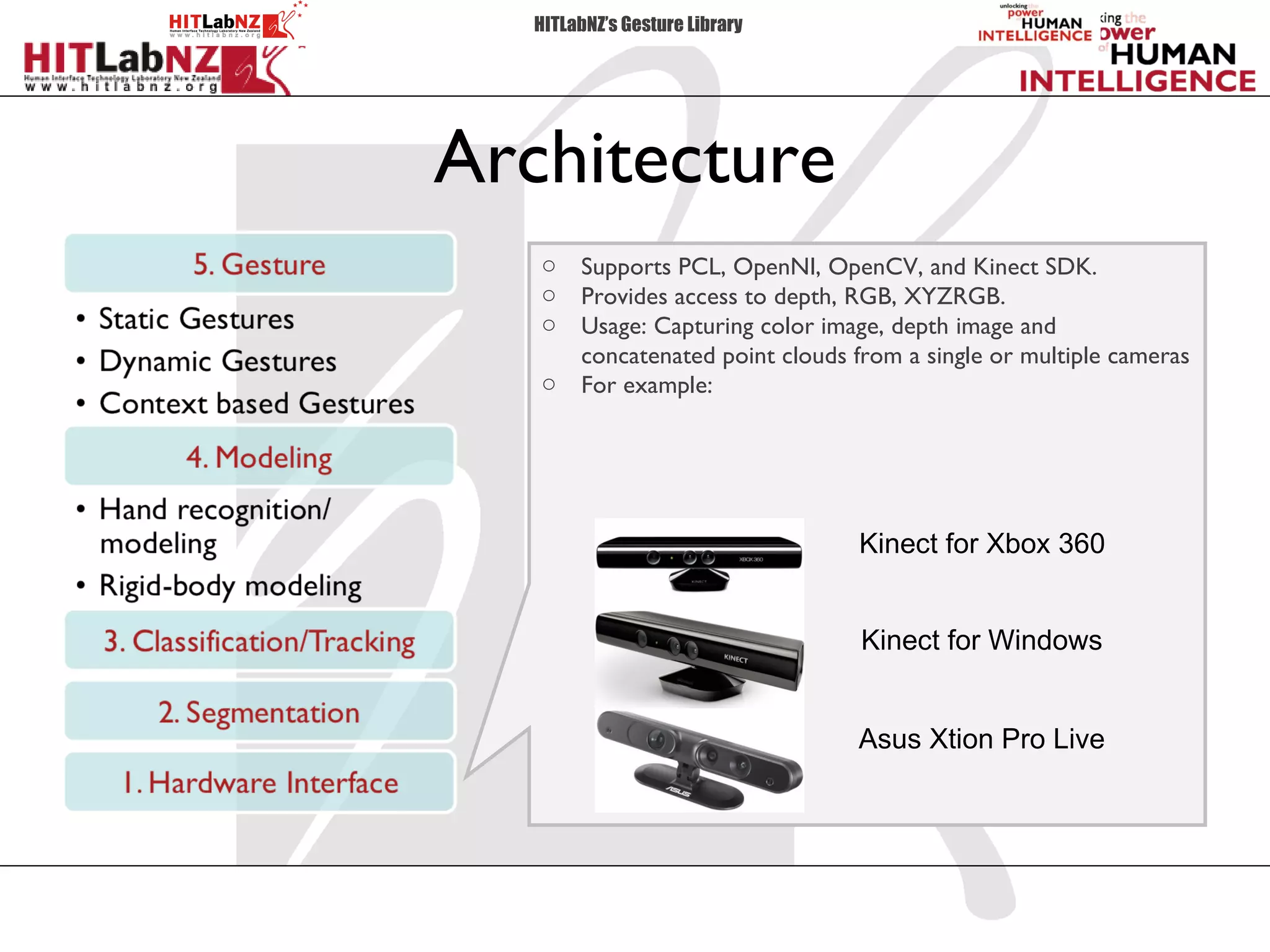
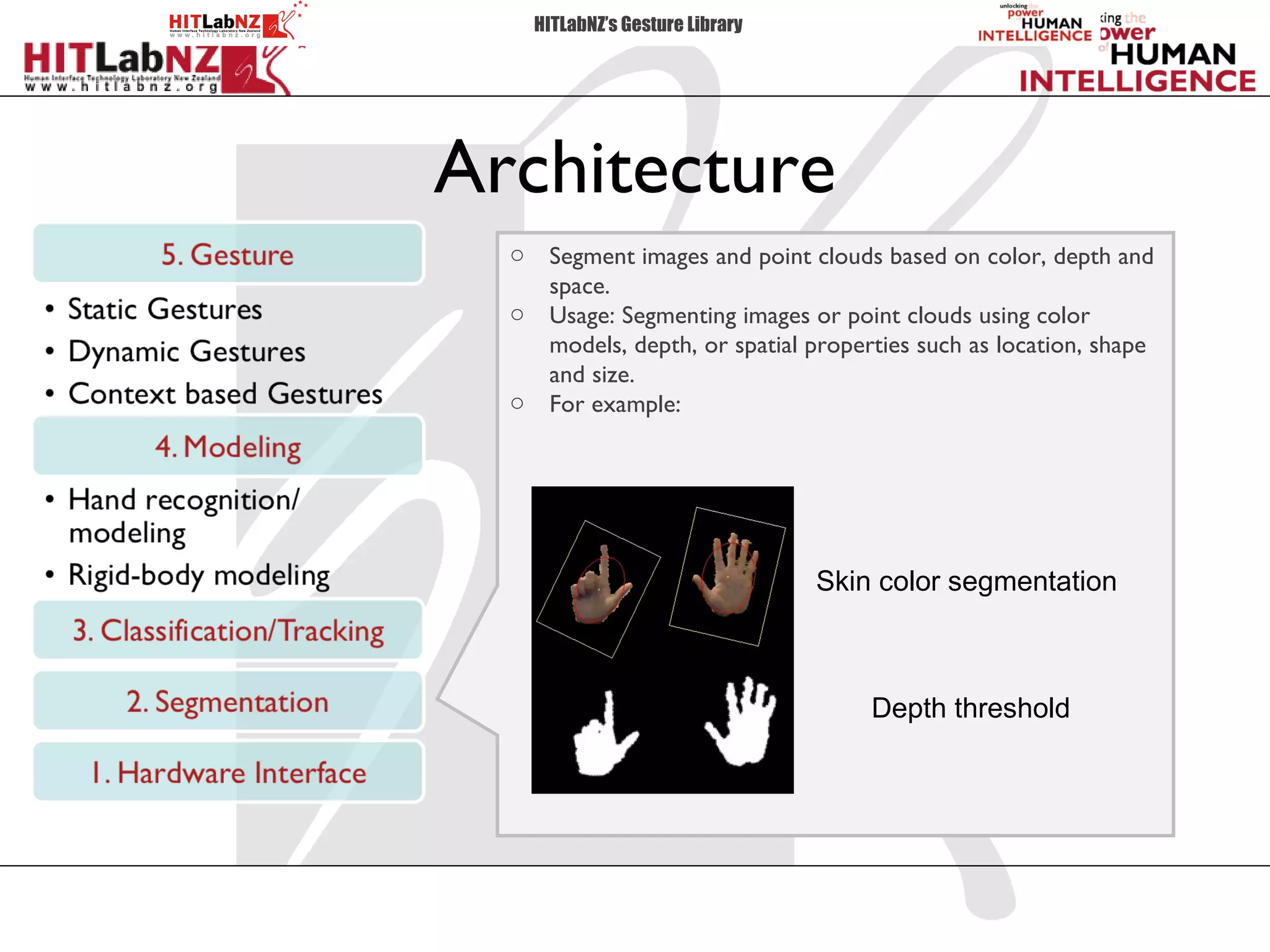
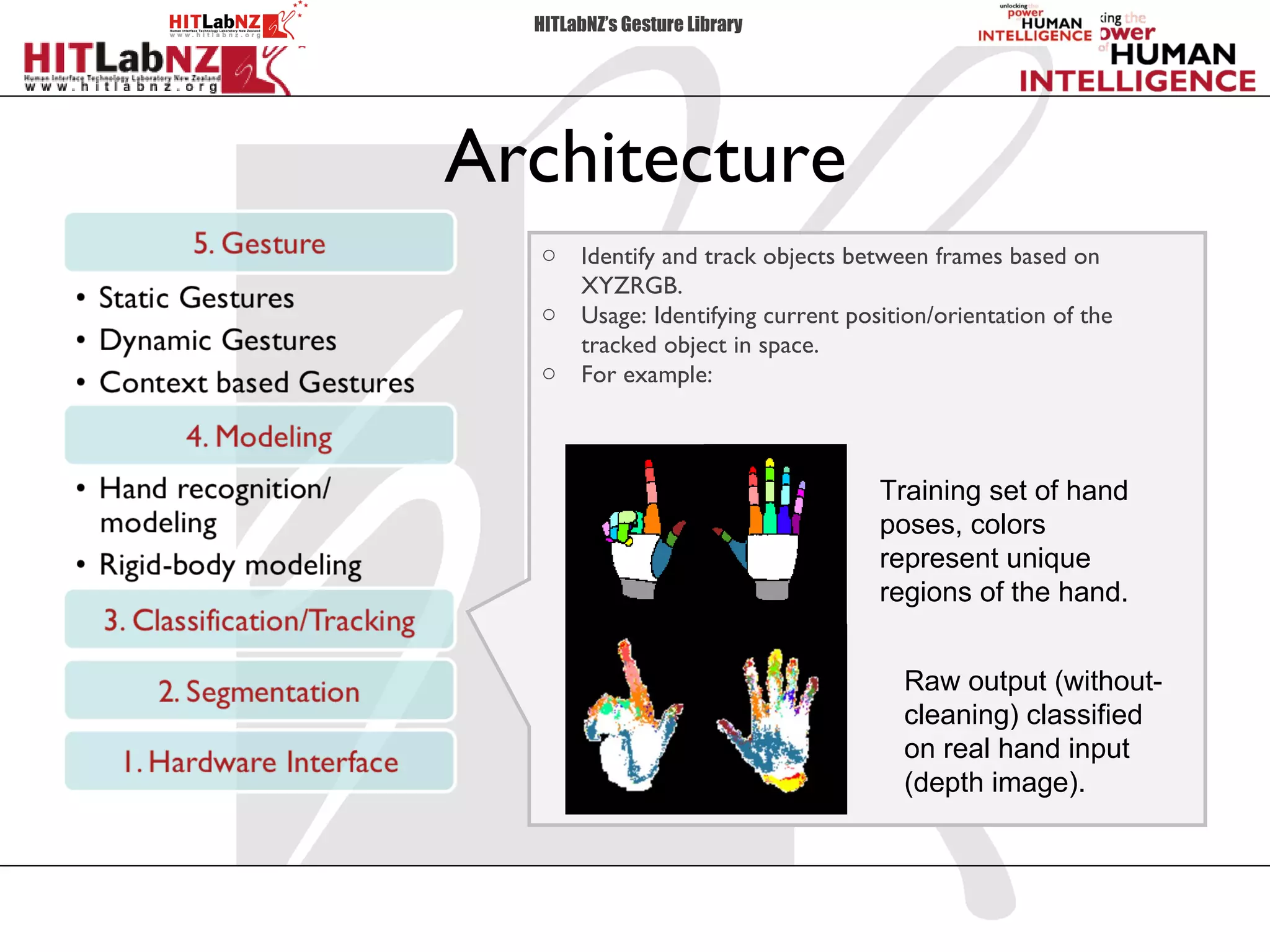
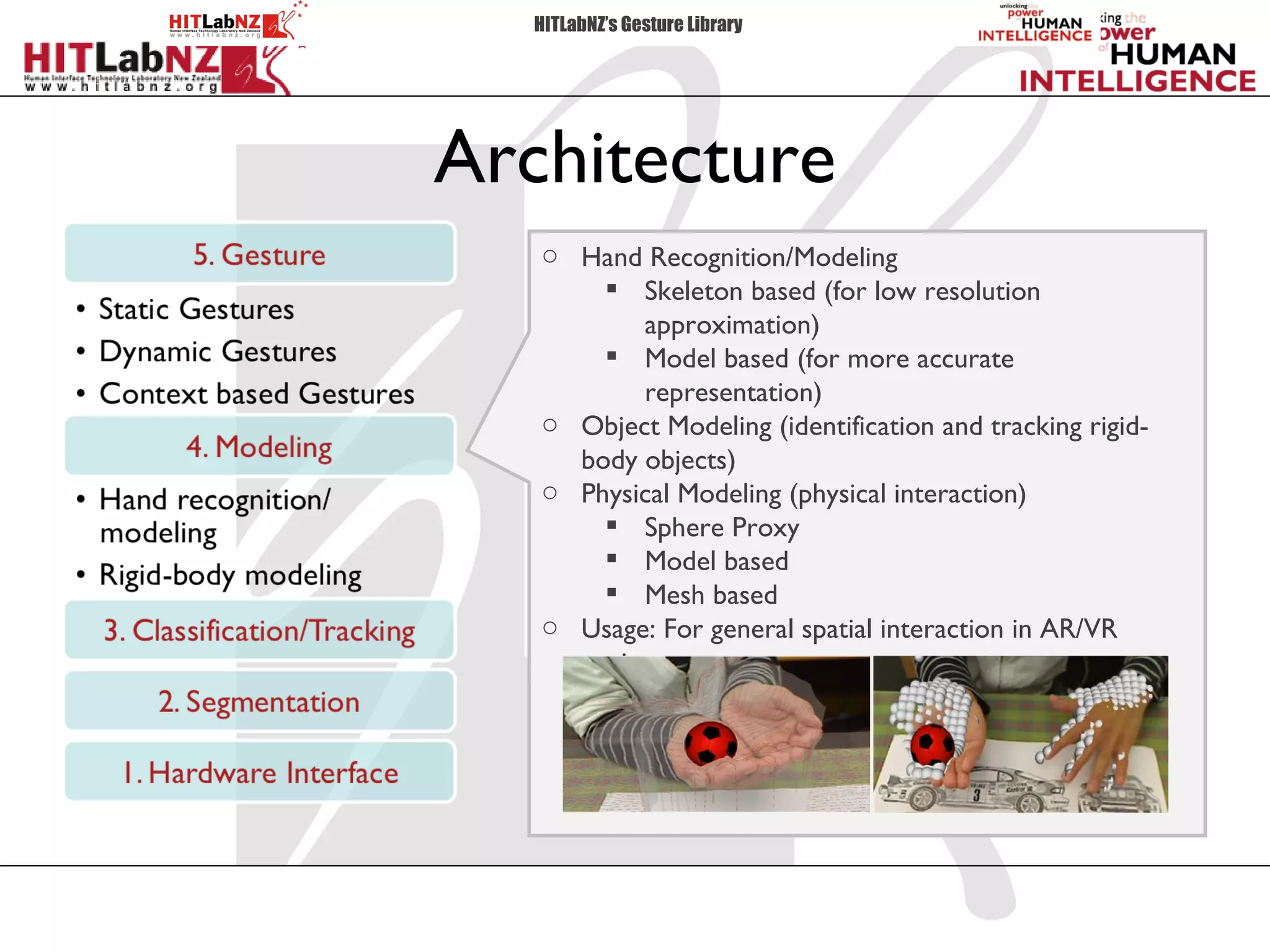
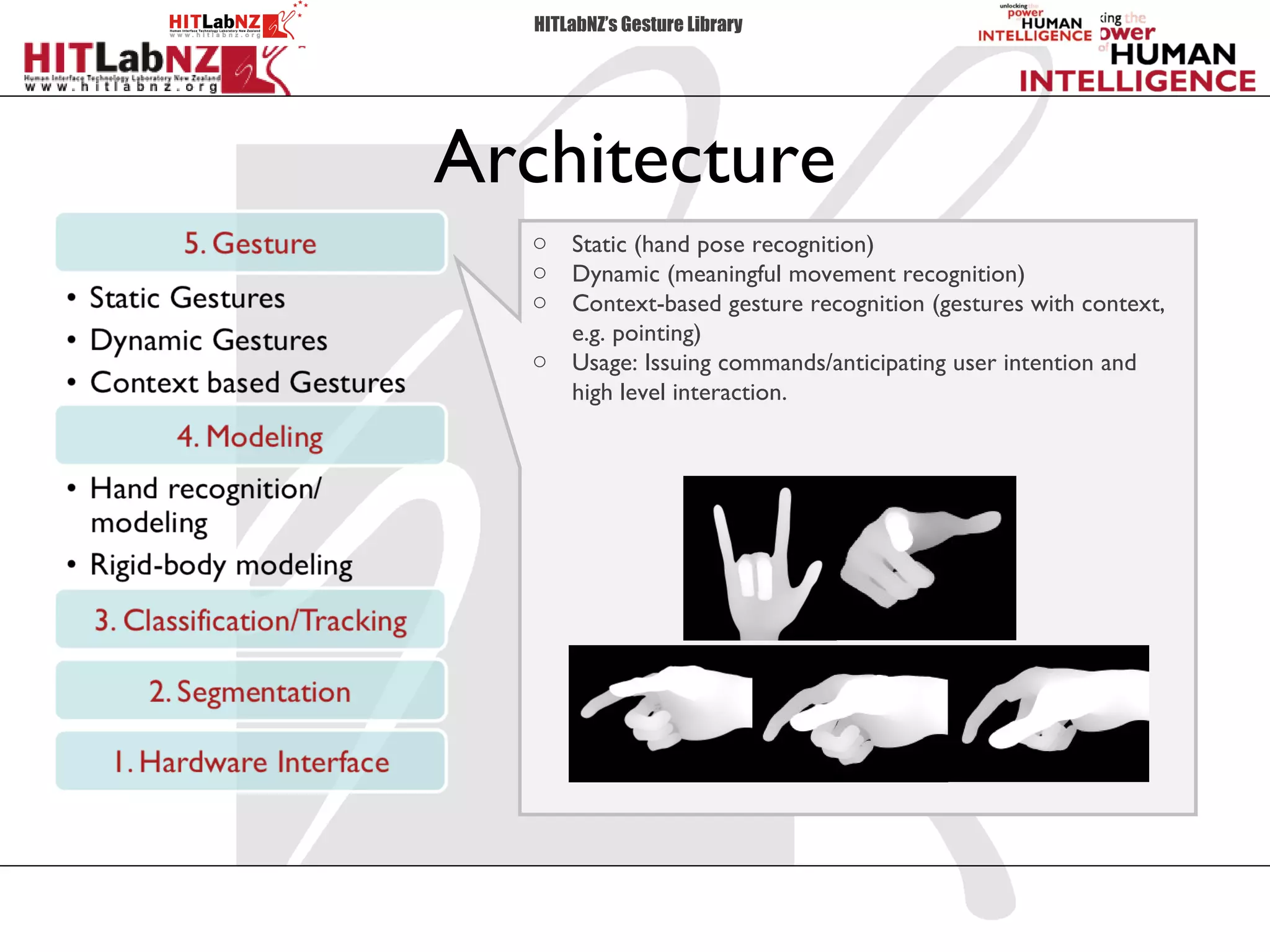
Details of HIT Lab NZ's gesture library architecture for recognizing and tracking gestures within AR environments.
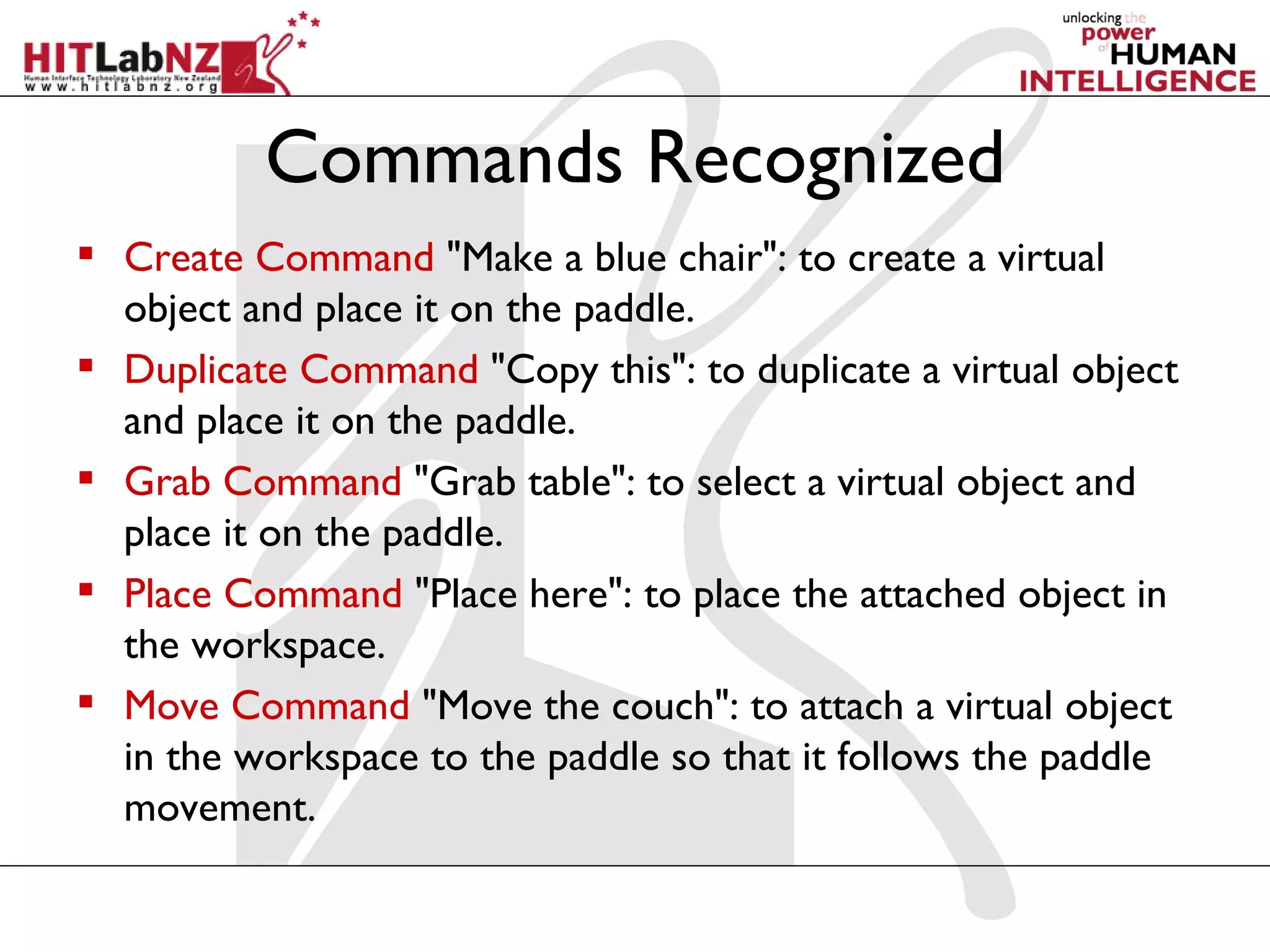
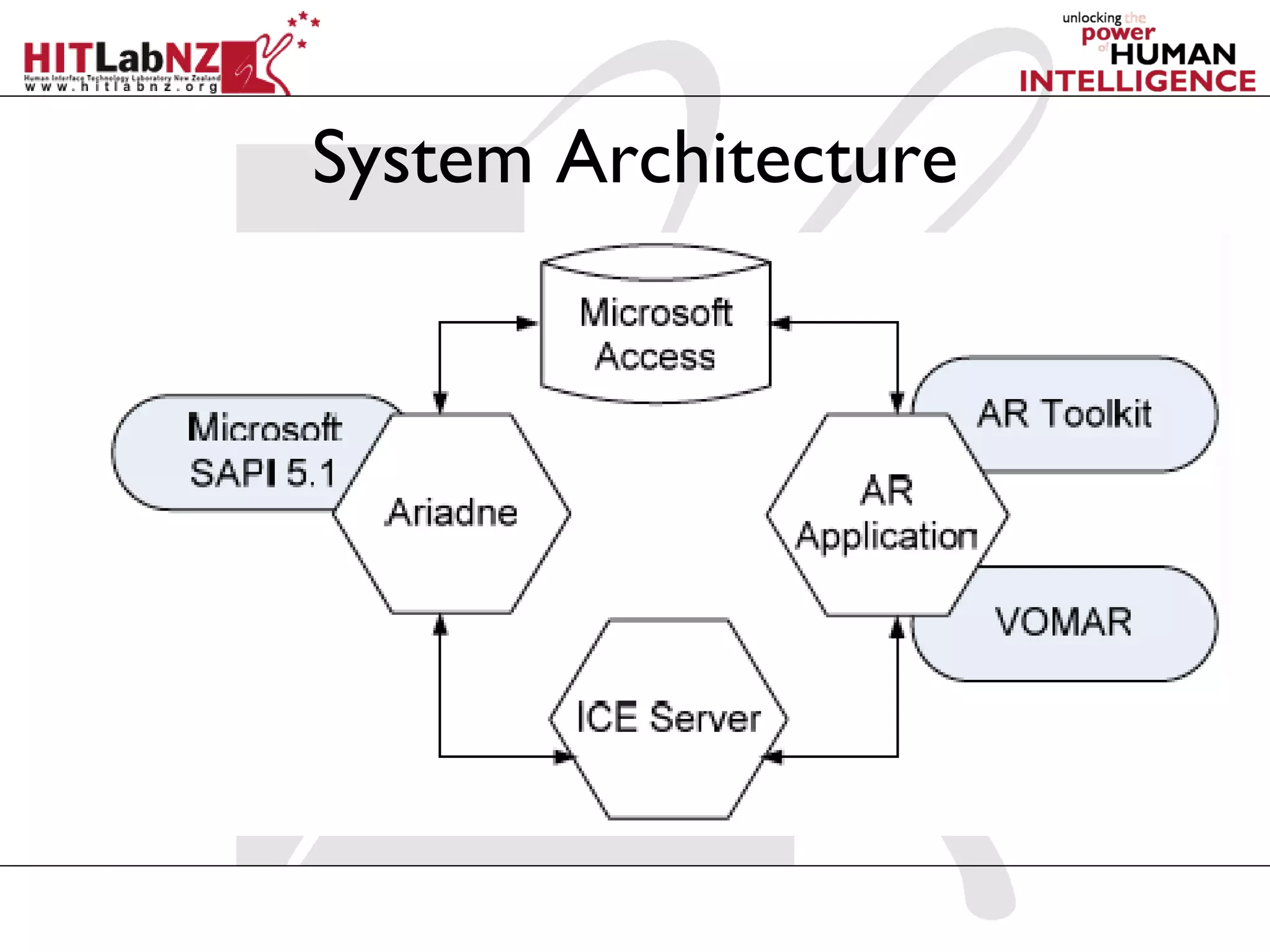
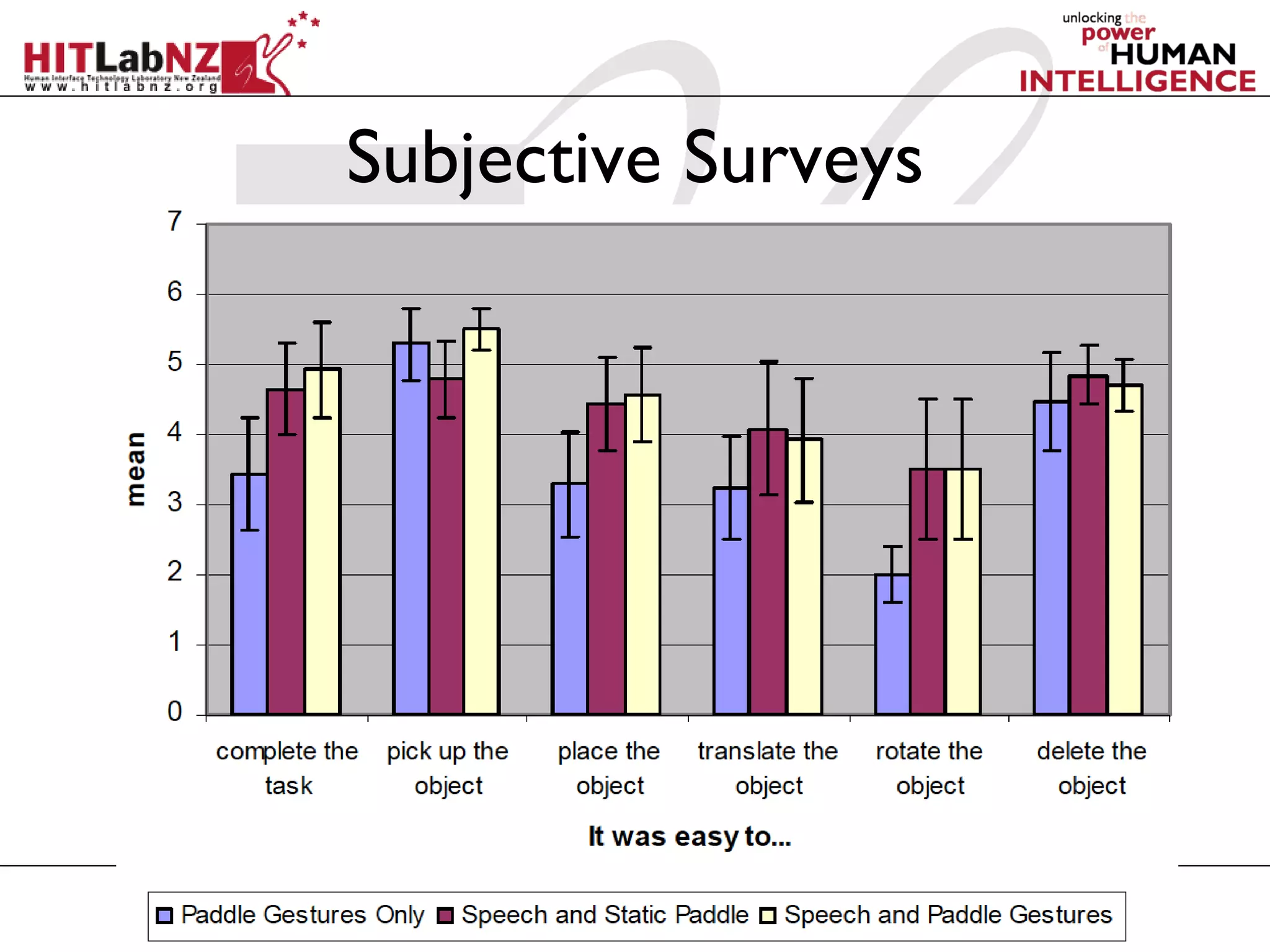
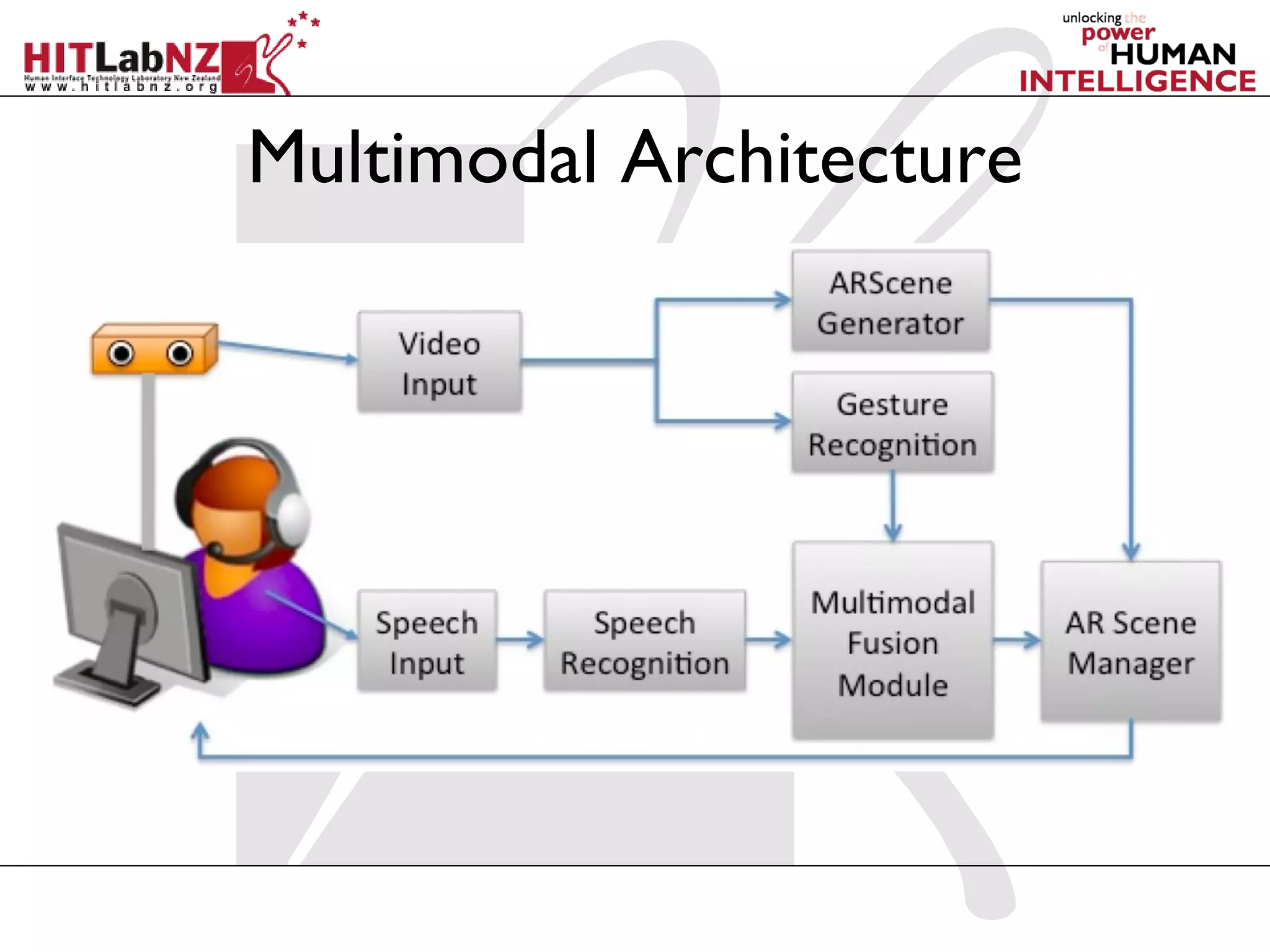
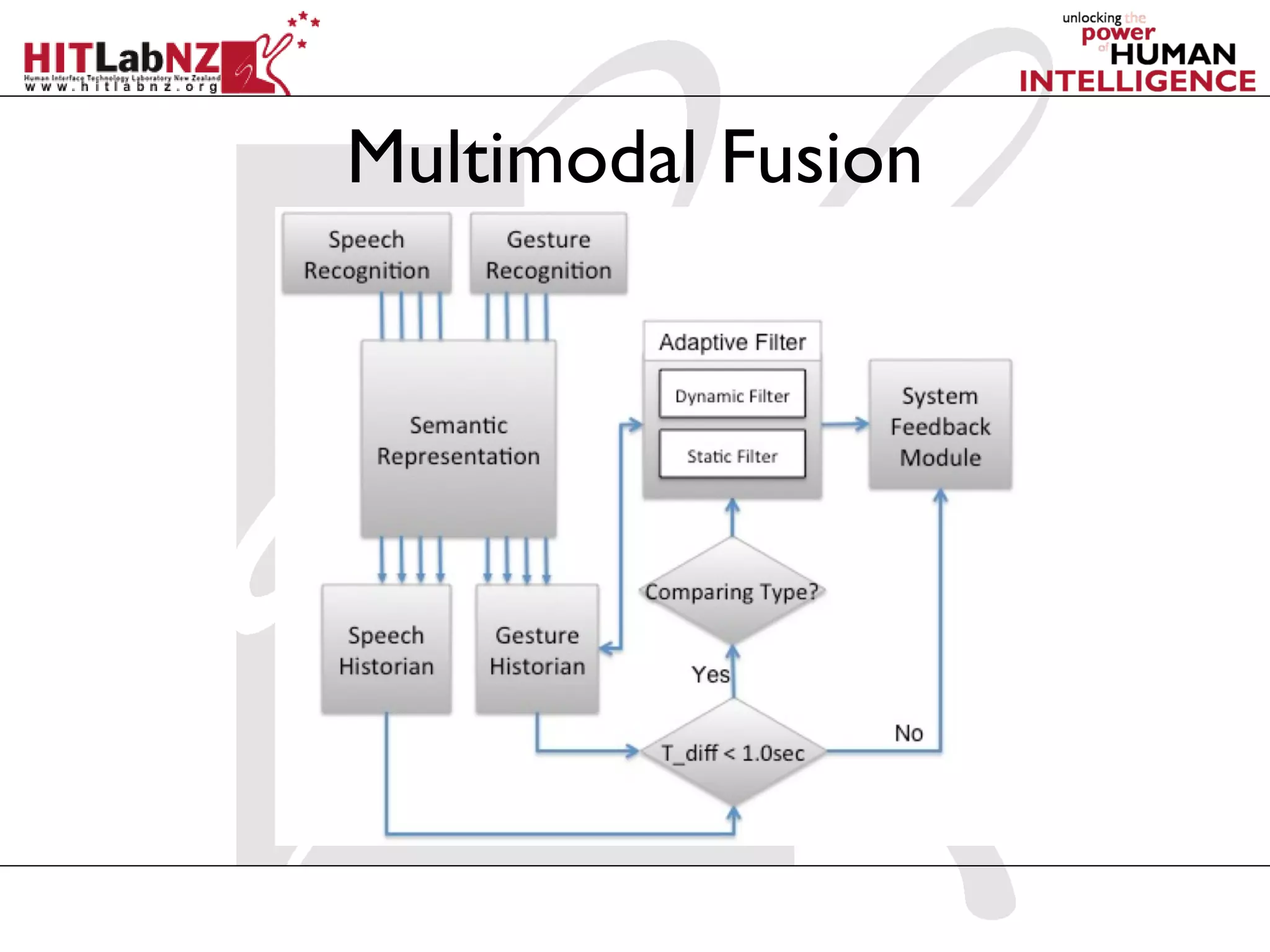
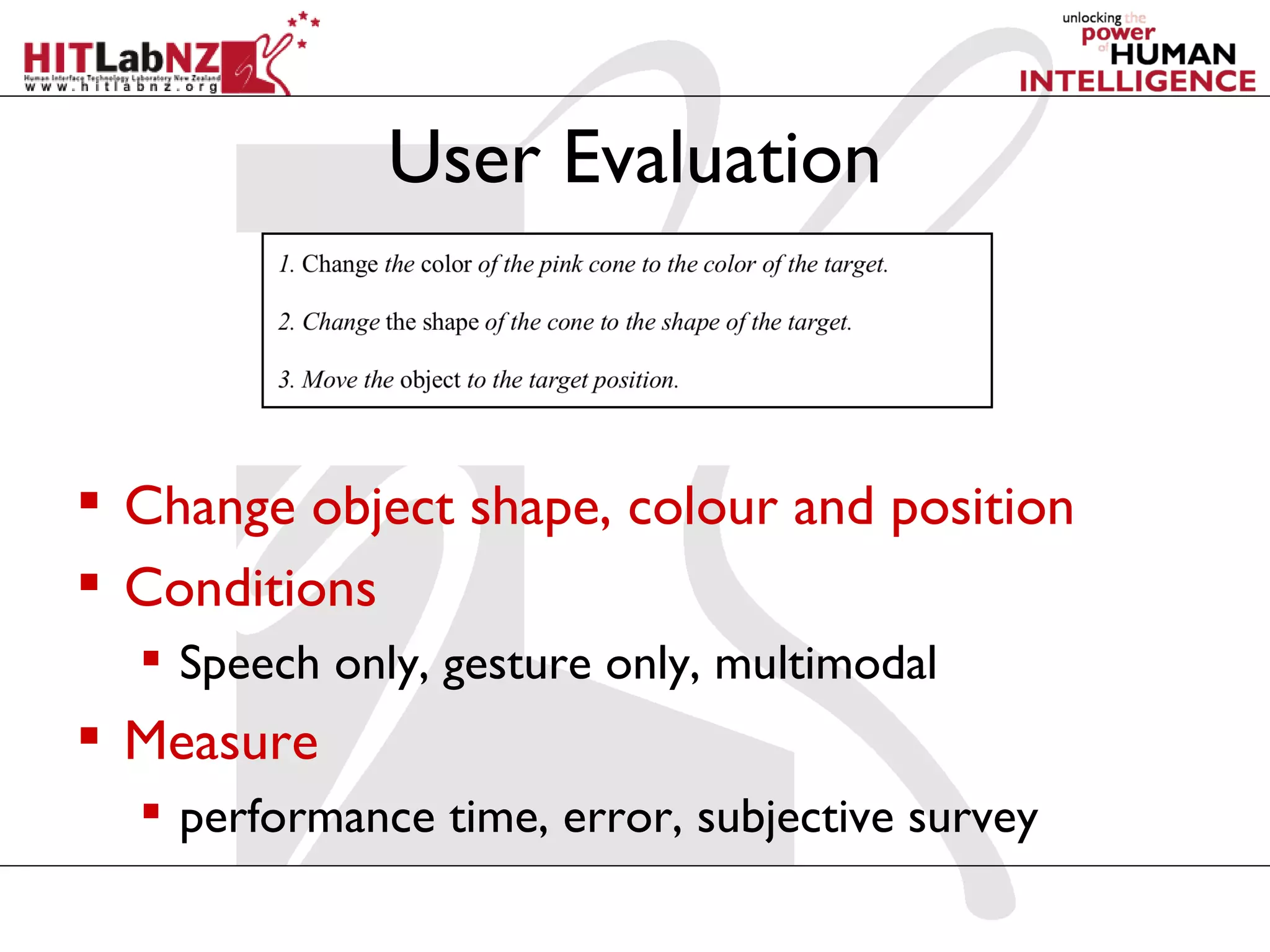
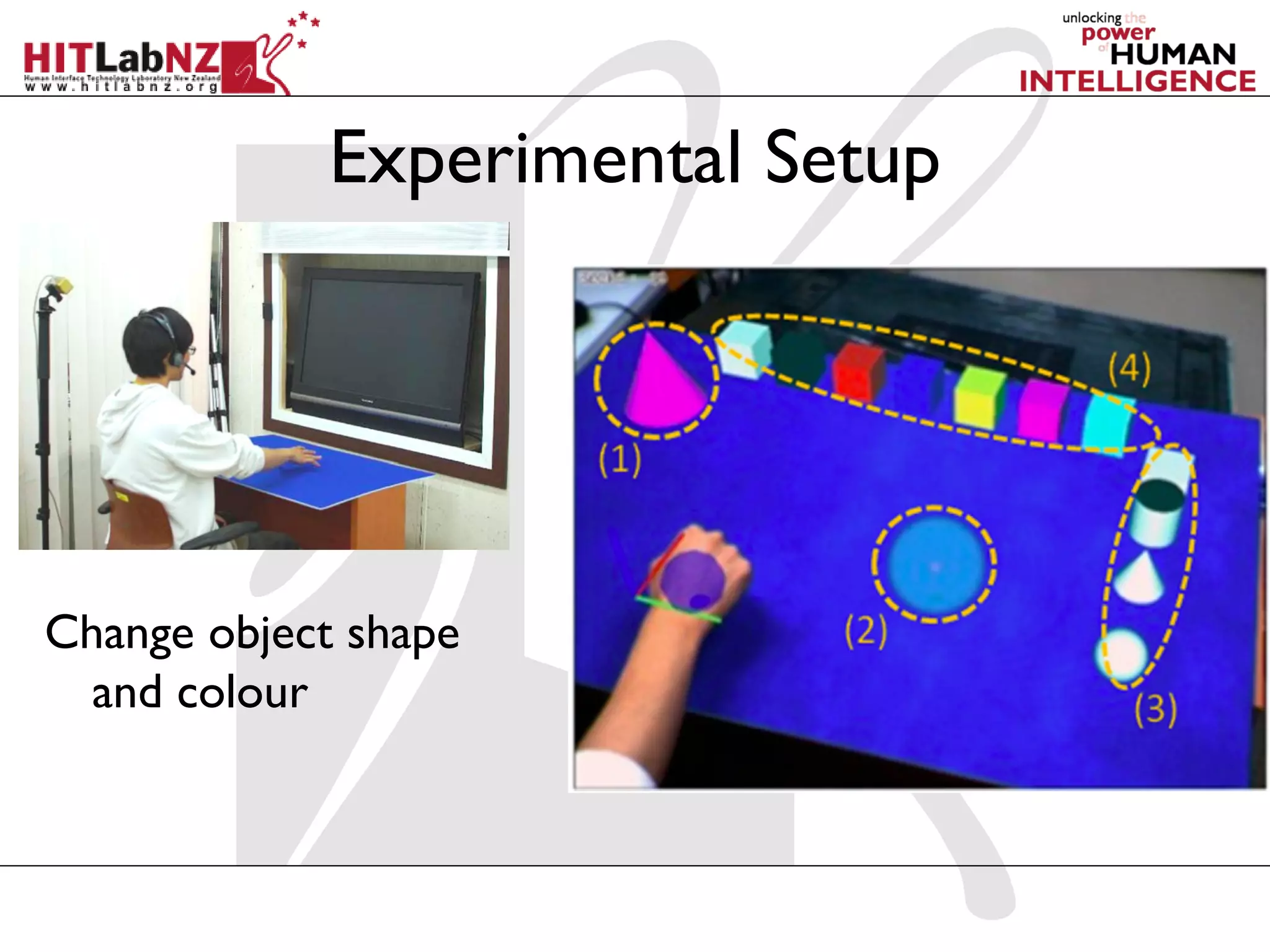
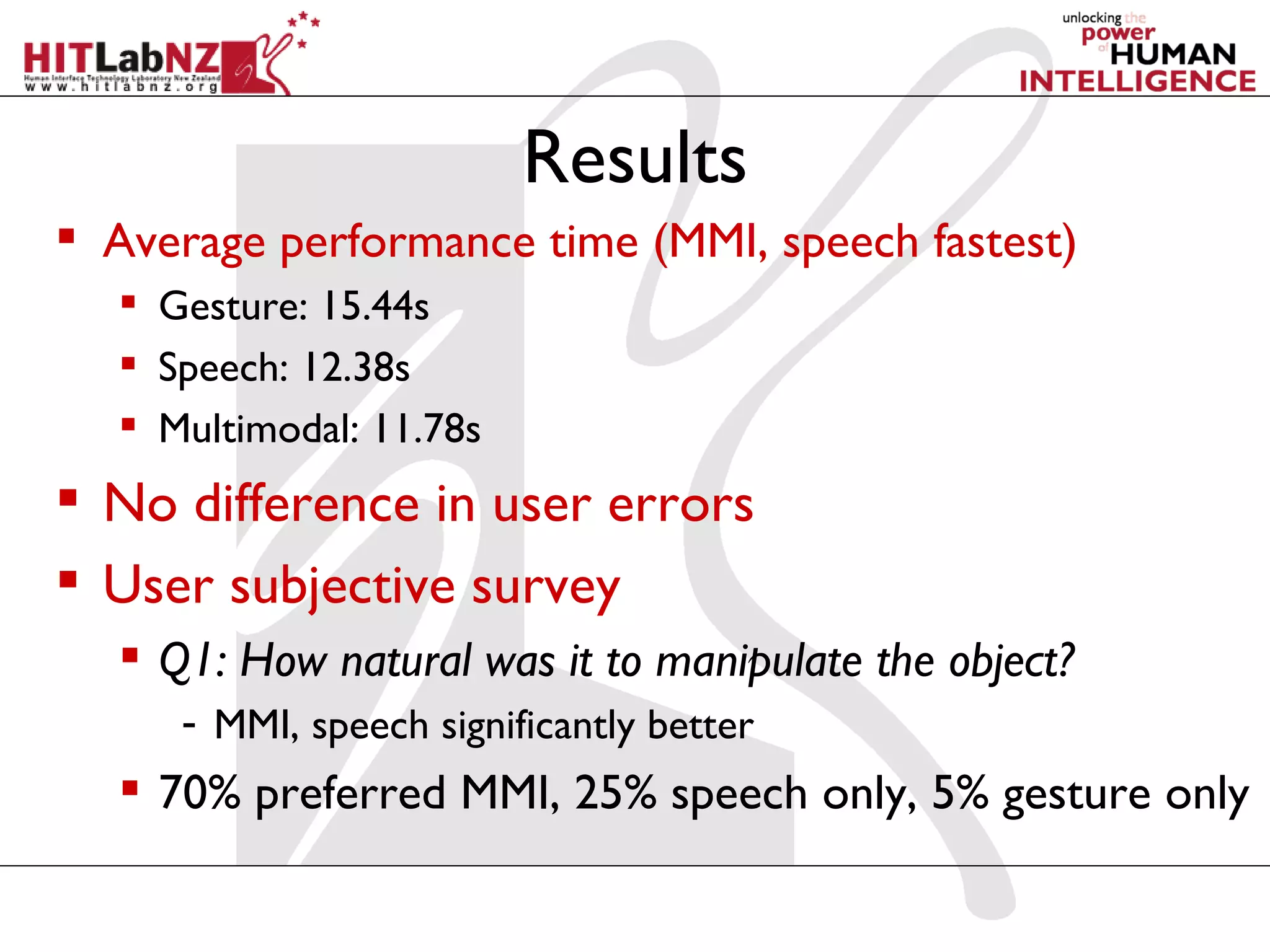
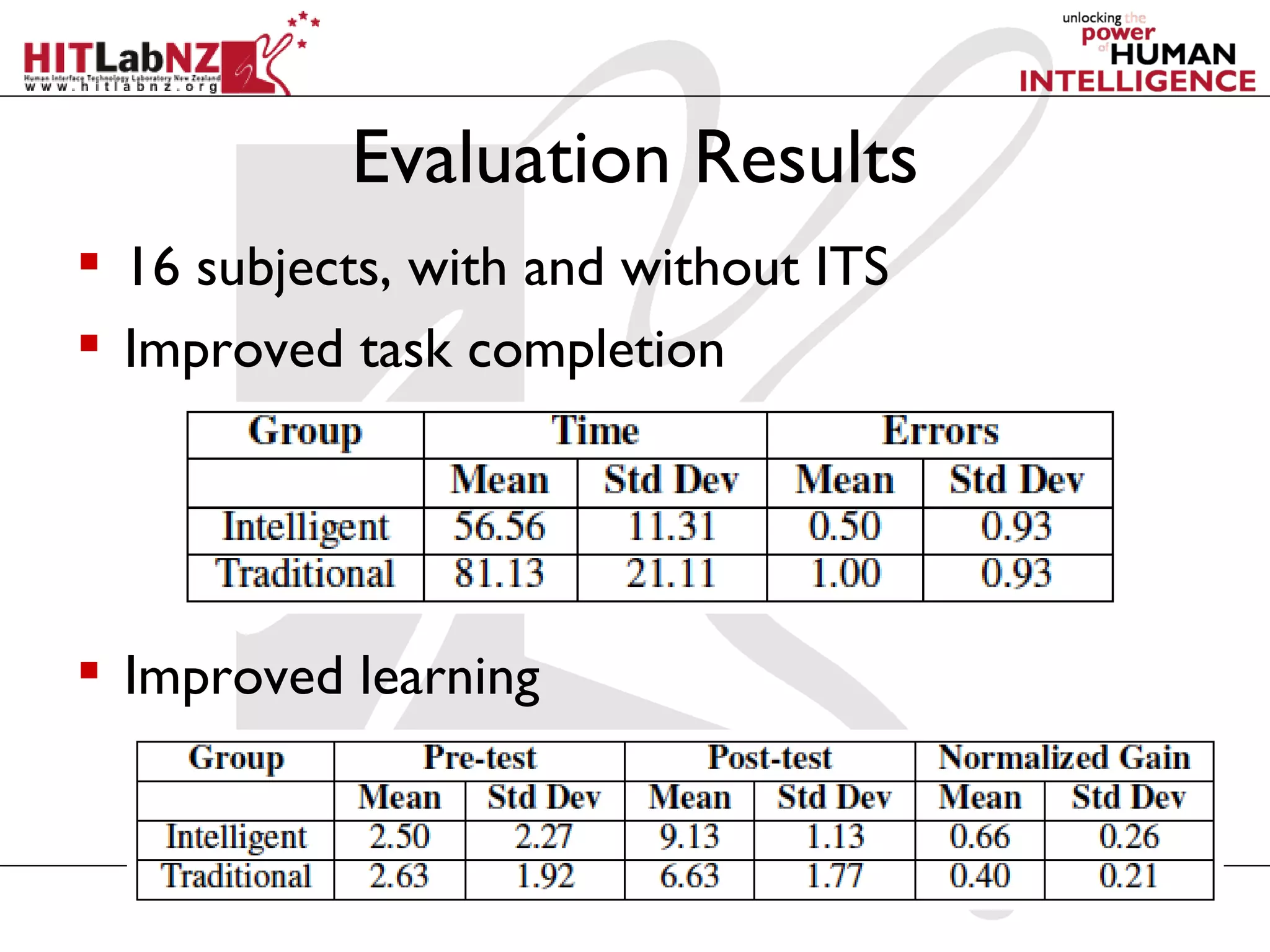
Multimodal interaction combines speech and gestures, leading to faster performance times and preferred user experiences.
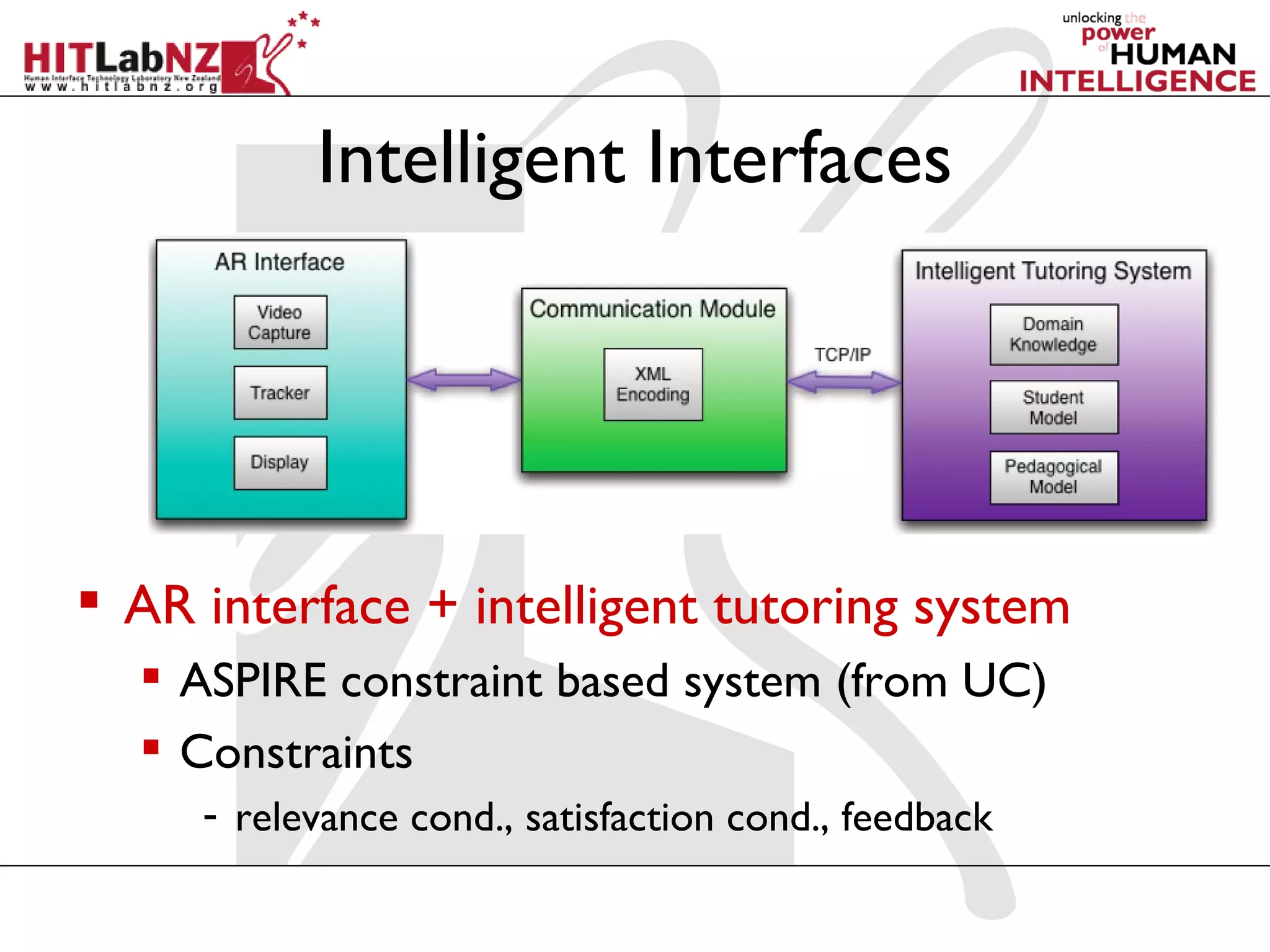
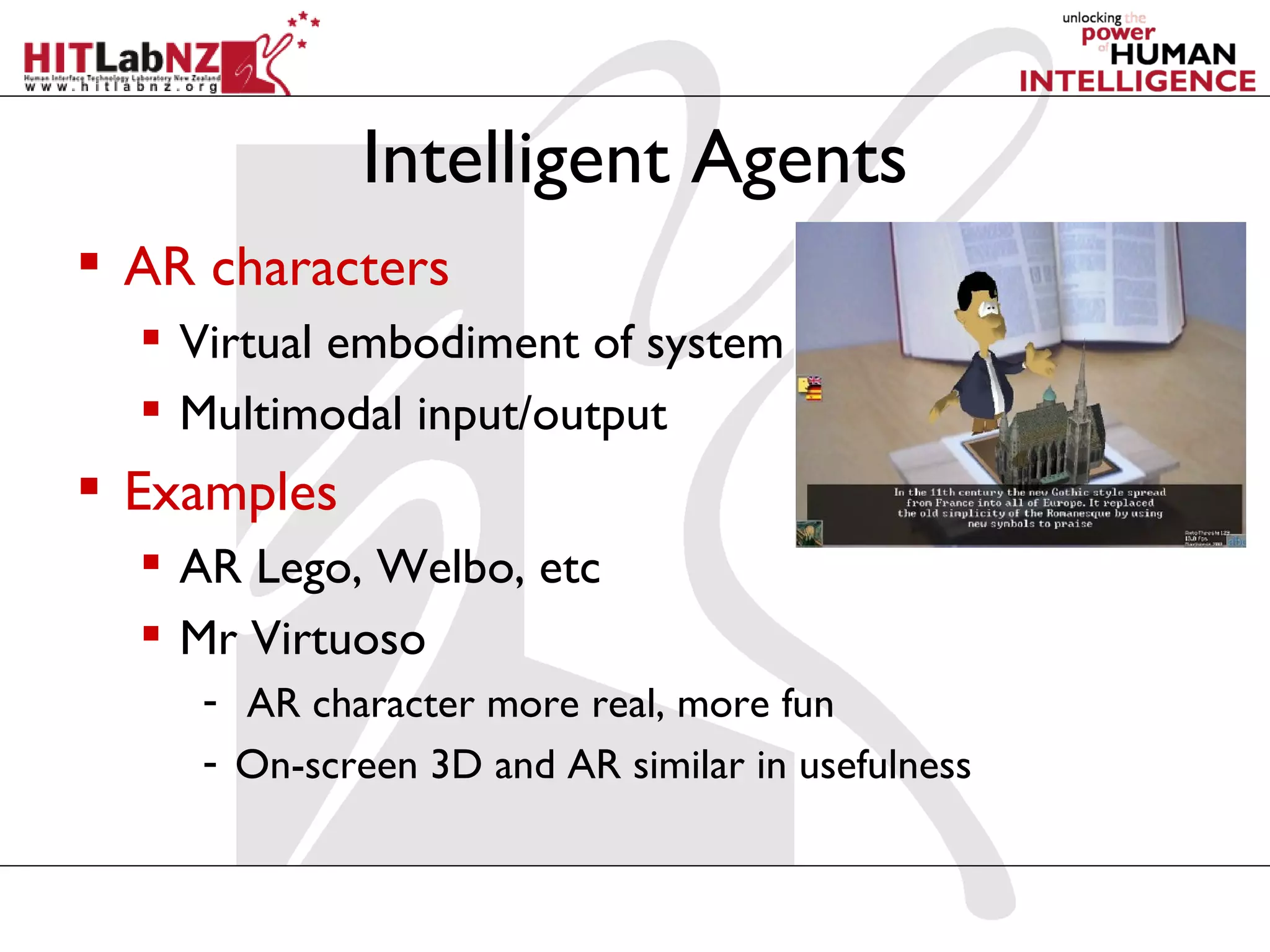
Future research areas include mobile gesture input, intelligent systems for AR, and the integration of virtual characters. AR's advances in tangible interaction and natural control methods present new opportunities for development and research.























































































