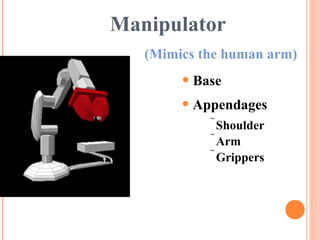
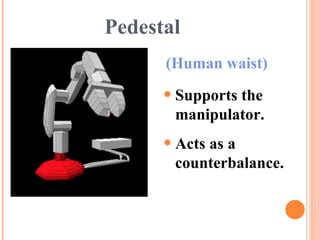
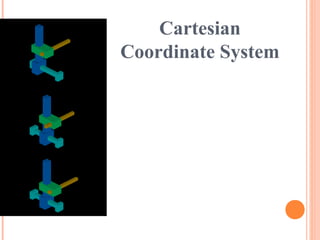
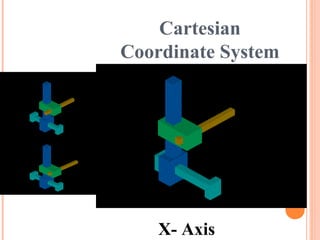
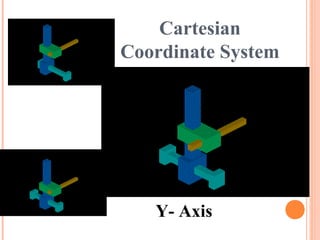
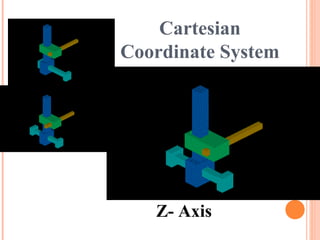
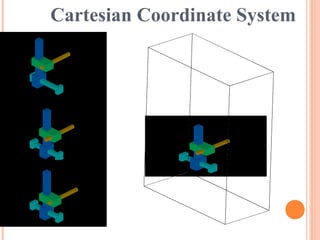
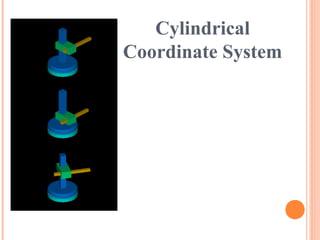
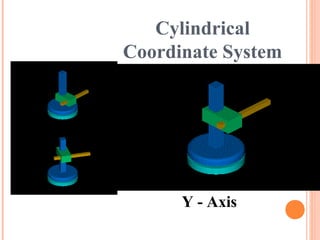
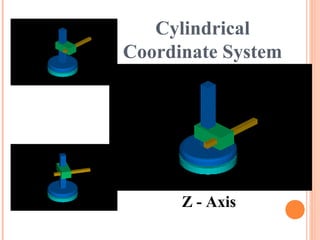
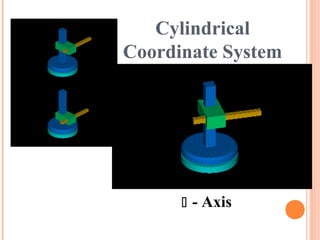
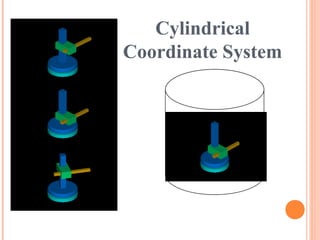
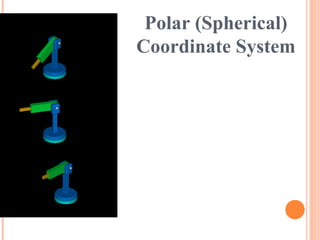
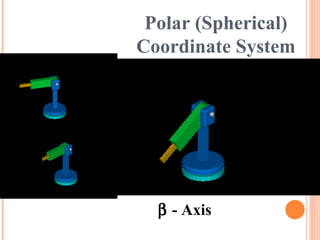
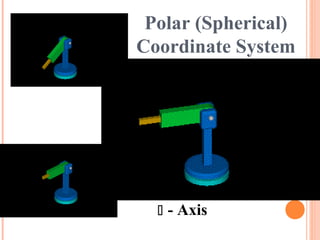
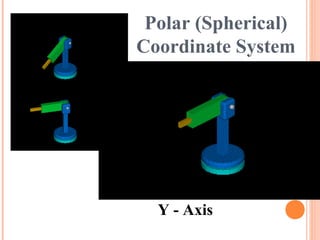
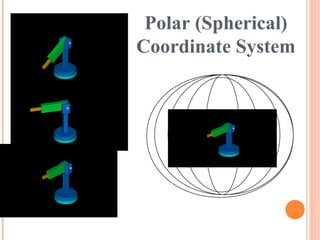
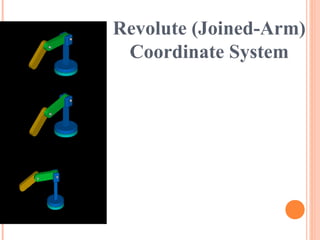
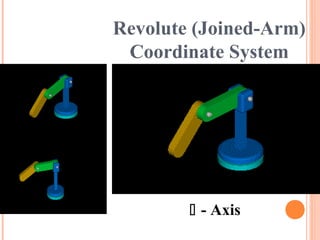
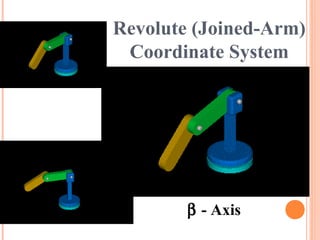
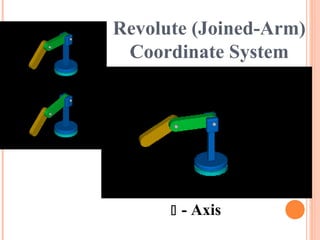
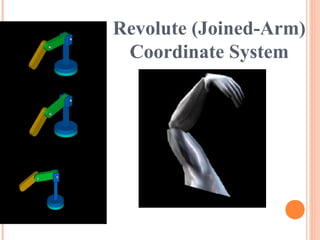
This document provides an introduction to robotics. It discusses the types of robots from simple to complex levels. The parts of a robot are also explained, including the manipulator, pedestal, controller, end effectors, and power source. Different coordinate systems for robot movement are described, such as Cartesian, cylindrical, and revolute systems. Applications of robots include transporting materials, assembly, quality control, cutting materials, and more.