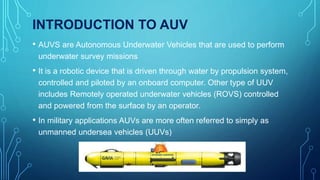
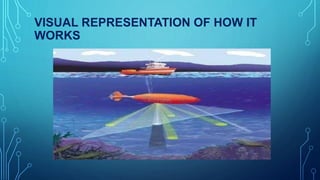
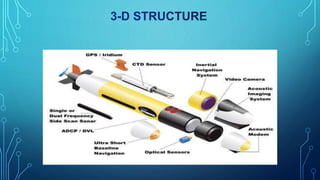
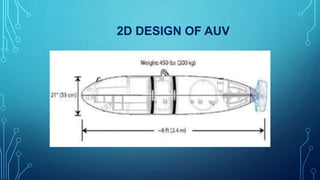
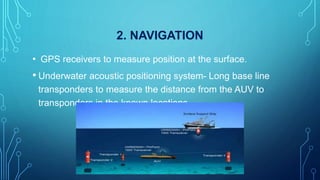
This document provides an overview of autonomous underwater vehicles (AUVs). It discusses that AUVs are robotic devices that can navigate underwater without direct human control. The document outlines the history of AUV development, starting in the 1950s. It describes the key components of AUVs, including sensors, navigation systems, propulsion methods, and power sources. Applications of AUVs include commercial uses like seabed mapping, military uses such as mine detection, and scientific research applications. The conclusion discusses how AUVs have become an important tool for ocean exploration and monitoring in recent decades.












































![[DSC Europe 25] Elena Menshikova - AI-Powered Operational Excellence: Revolut...](https://cdn.slidesharecdn.com/ss_thumbnails/es6nholbqy3zaao2c2yd-2-elena-menshikova-data-ai-in-decision-making-260115093812-4fba8b38-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Slobodan Dolinic - Smart and Intelligent Green Region.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/0bribinjsp6ghwtvsvor-2-sigre-slobodan-dolinic-260115093812-c9c10e90-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Ivan Lukovic & Marija Djukic - From Data to Value: Why Maturi...](https://cdn.slidesharecdn.com/ss_thumbnails/ahrfps8xr6knowwhacxh-1-ivan-marija-dsc-2025-ld-v1-presentation-260115093812-be21adfc-thumbnail.jpg?width=640&height=640&fit=bounds)