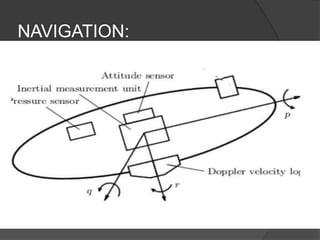
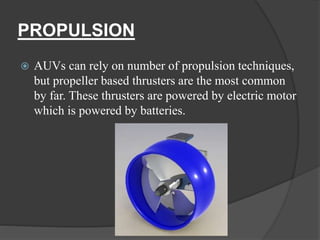
This document discusses autonomous underwater vehicles (AUVs), which are robots that can operate underwater without human presence. It describes the key parameters of AUVs, including sensors, navigation, propulsion, power, and communication systems. Some common sensors are sonar, depth sensors, and magnetometers. Most AUVs use propeller-based thrusters powered by electric motors and batteries. Applications of AUVs include commercial, military, and scientific uses such as ocean exploration and anti-submarine warfare.