Downloaded 25 times
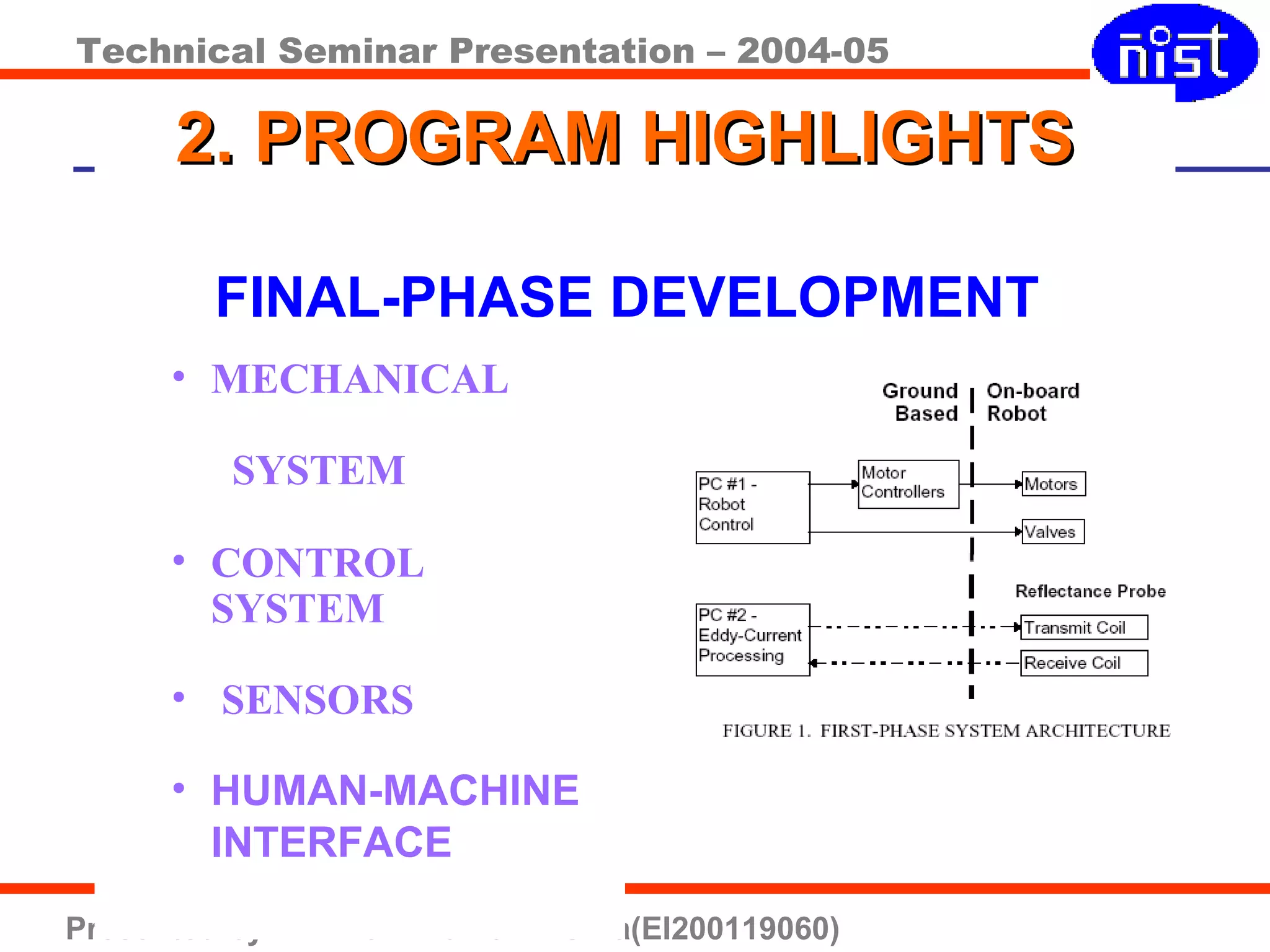
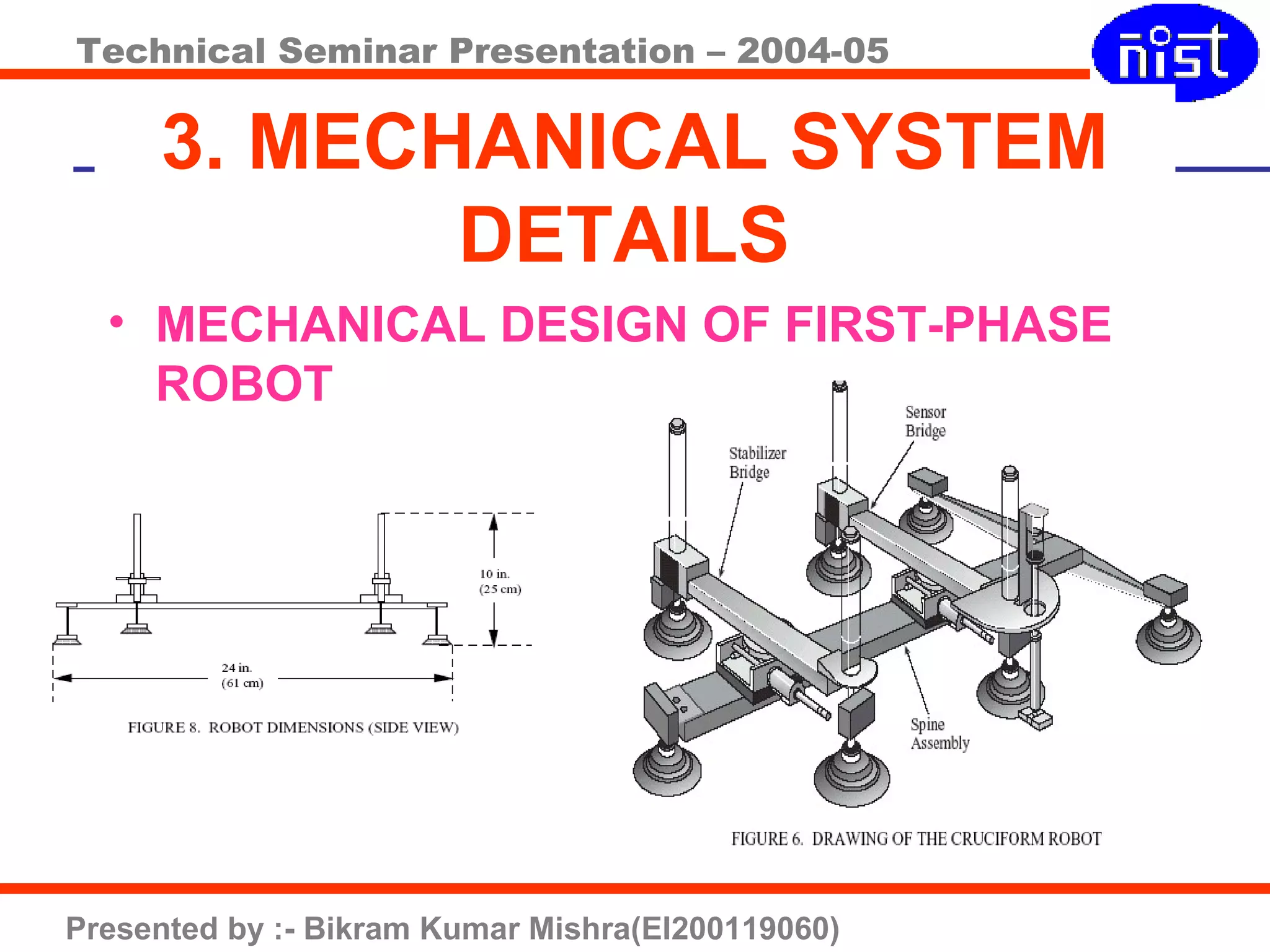
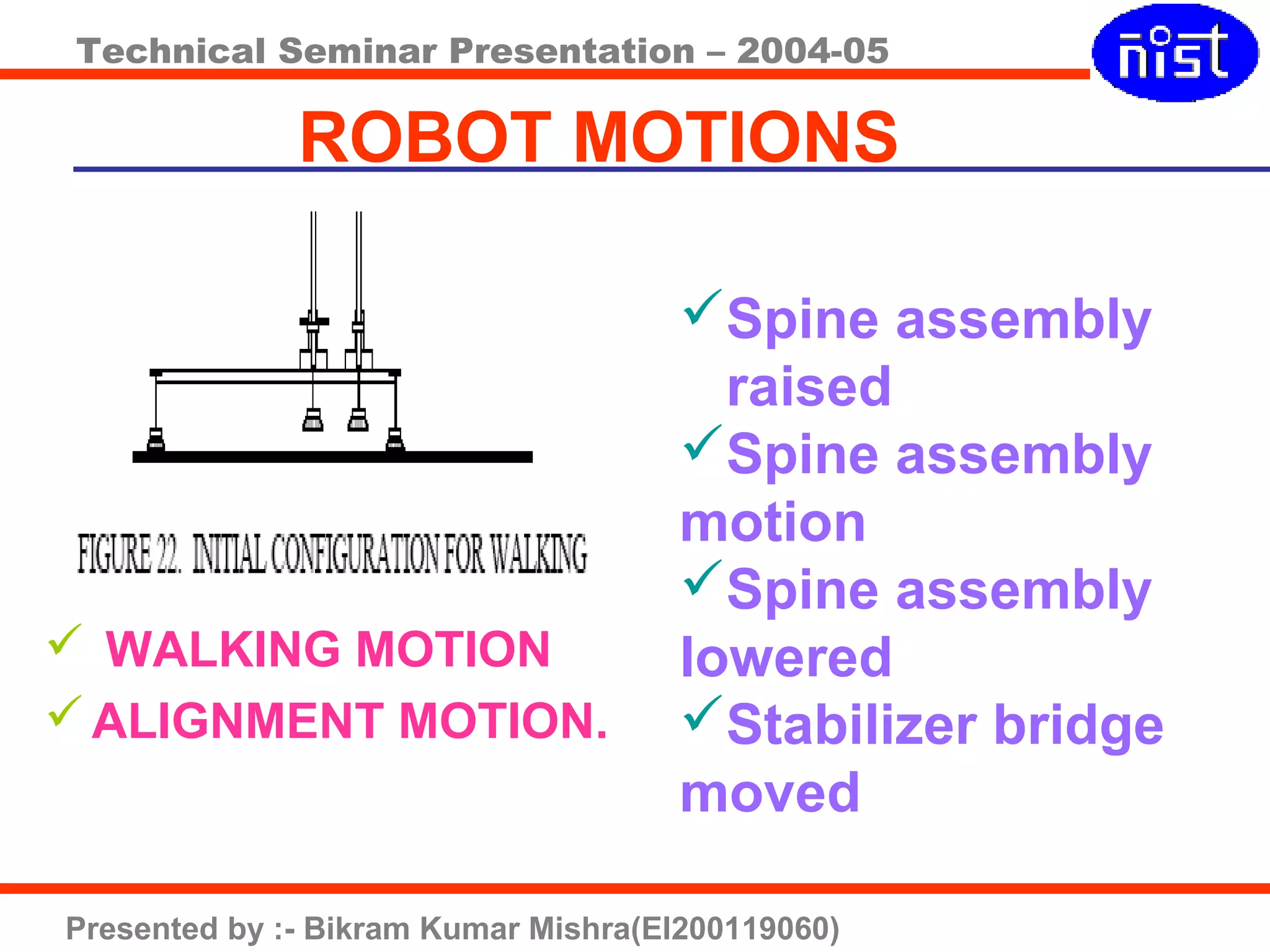
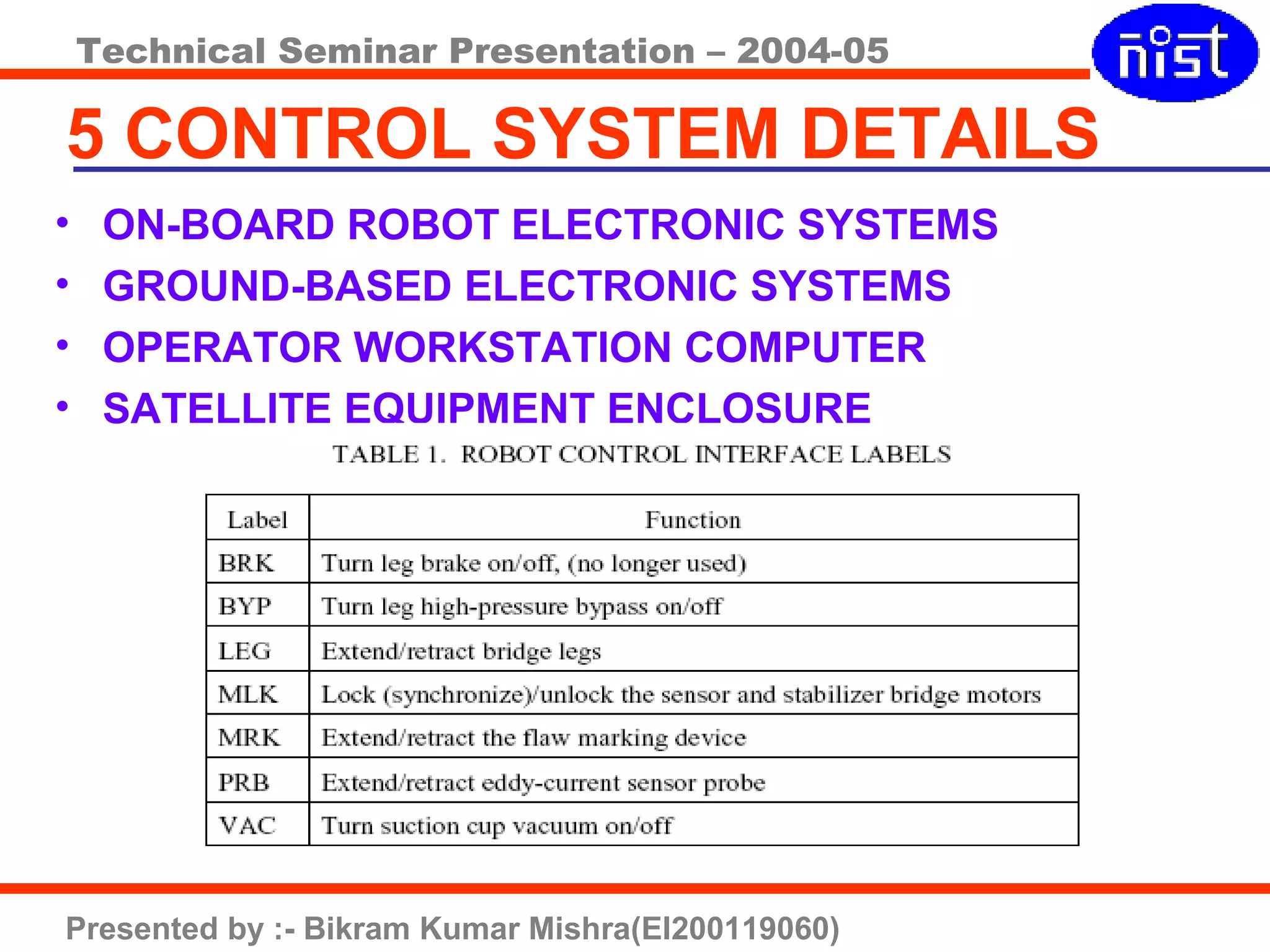

Bikram Kumar Mishra presented on developing robotic tools to assist in automated aircraft inspection. The presentation covered establishing technical feasibility, developing robotic systems with mechanical, control, and sensor systems, and final phase development including eddy current sensors for inspection and video cameras for navigation. The goal was to create a robot that can walk over an aircraft, perform inspections identical to manual methods, and be remotely operated using sensor feedback to the inspector.




































![JOB PORTFOLIO_PRASHANTH_2015 [Compatibility Mode]](https://cdn.slidesharecdn.com/ss_thumbnails/cfe82d46-004b-4f25-be17-1f46c5ab1afc-150923190817-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)