Dokumen ini menguraikan konsep dan aplikasi robot artikulasi, termasuk fungsi, struktur, serta kelebihan dan kelemahannya. Robot ini memiliki tiga lengan yang digerakkan oleh motor elektrik dan banyak digunakan dalam industri untuk tugas repetitif dengan presisi tinggi. Selain itu, dokumentasi ini menjelaskan tentang komponen asasi dan keperluan robot dalam pelbagai aplikasi industri.

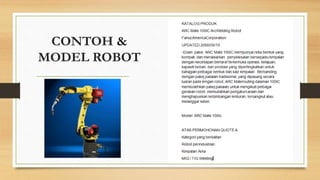
![KEGUNAAN ROBOT DI INDUSTRI
• Robot industri ditakrifkan oleh ISO 8373 [ 1 ] sebagai yang dikawal secara
automatik , reprogrammable , pelbagai guna diprogramkan manipulator
dalam tiga atau lebih paksi.
• Sesetengah robot diprogramkan untuk setia melaksanakan tindakan tertentu
berkali-kali (tindakan berulang-ulang) tanpa perubahan dan dengan tahap
yang tinggi ketepatan.
• Speed - berapa cepat robot boleh meletakkan hujung lengan .
• Kebolehulangan - bagaimana robot yang akan kembali ke kedudukan yang
telah diprogramkan.](https://image.slidesharecdn.com/articulatedrobot-150324233129-conversion-gate01/85/Articulated-robot-15-320.jpg)