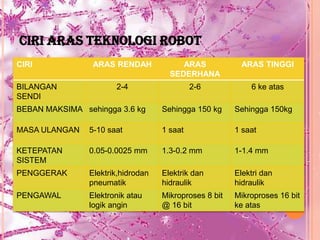
Dokumen ini menerangkan asas kemahiran robotik termasuk definisi, komponen, fungsi, dan kepentingan robot dalam industri serta domestik. Ia juga mengklasifikasi aras teknologi robot dan menerangkan cara mengendalikan pelbagai mekanisme dan komponen robot. Penekanan diberikan kepada kelebihan robot dalam meningkatkan kecekapan pengeluaran, keselamatan dan kualiti kerja.