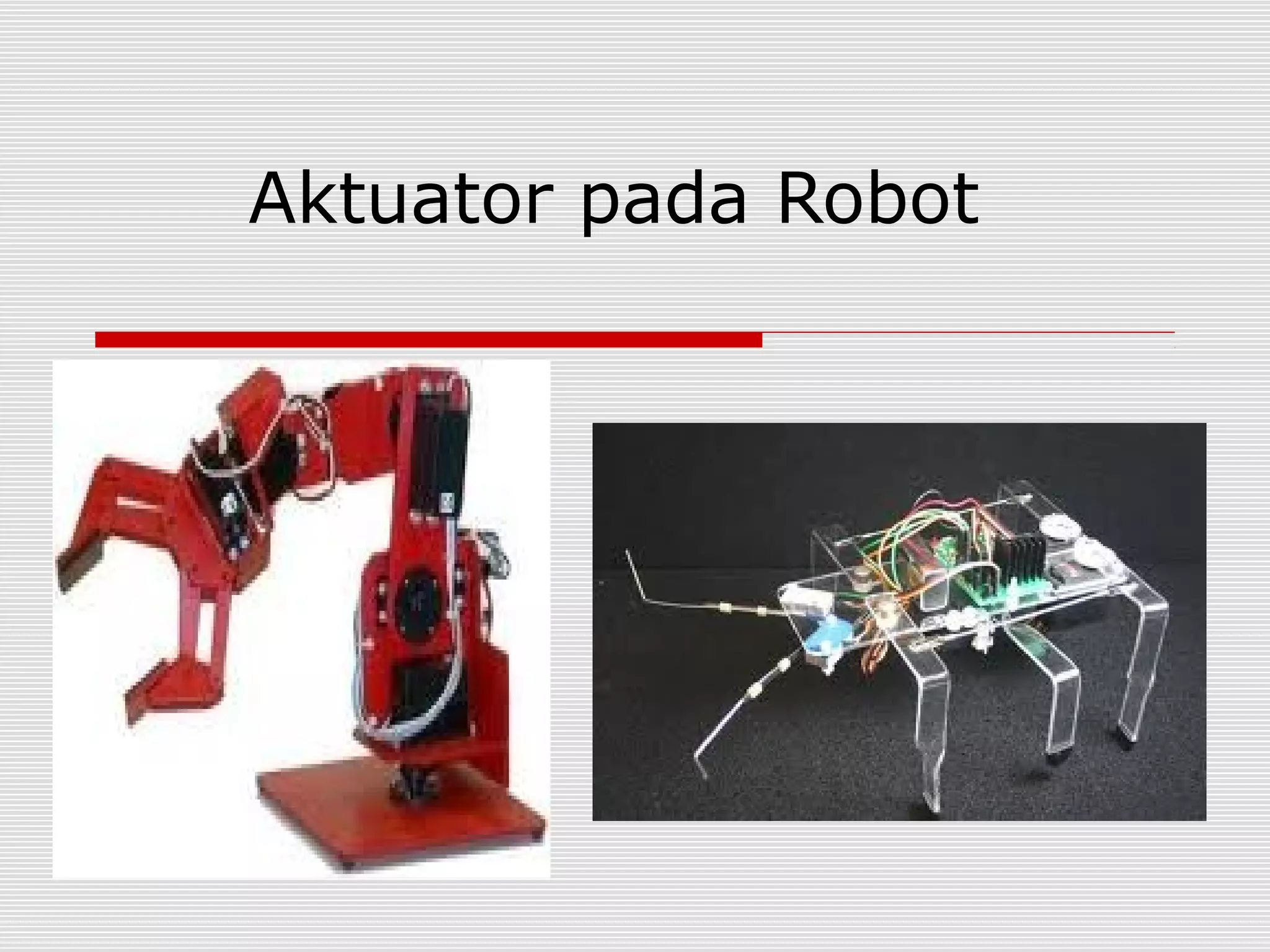
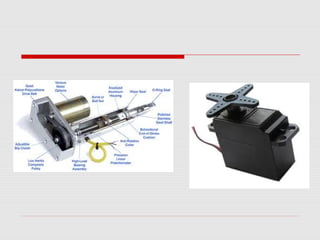
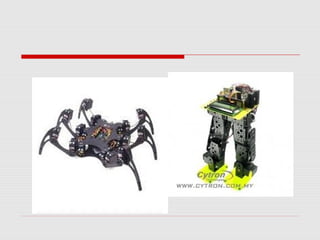
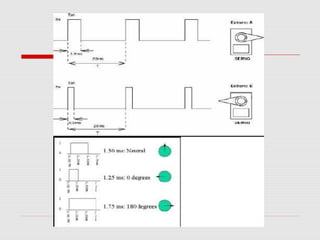
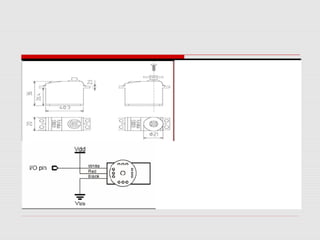
Aktuator adalah elemen penting pada robot yang berfungsi mengkonversi sinyal listrik menjadi gerakan melalui berbagai jenis aktuator seperti solenoid, motor DC, dan servo motor. Aktuator dikendalikan oleh kontroler robot untuk menghasilkan gerakan sesuai perintah. Aktuator sering dilengkapi gearbox untuk meningkatkan torsinya.











































































![Modul Ajar KBC SKI Kelas 3 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcskikelas3mimodulkelas-260130161838-4934e483-thumbnail.jpg?width=640&height=640&fit=bounds)




