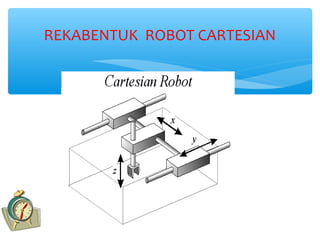
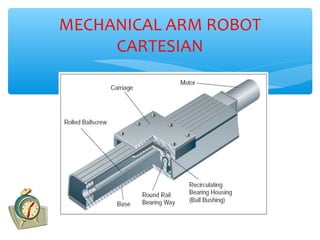
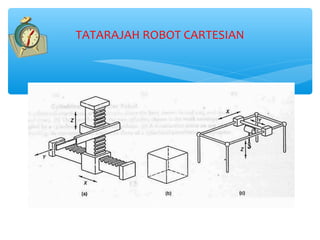
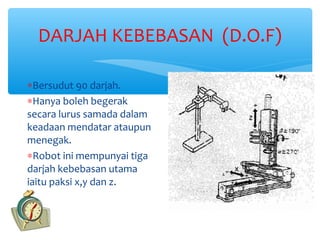
Dokumen menerangkan tentang robot Cartesian, termasuk fungsi, rekabentuk, dan konsep pergerakannya. Ia juga membincangkan aplikasi, kelebihan, dan kekurangan robot ini dalam industri, seperti pengendalian beban berat dan operasi pick and place. Robot ini mempunyai tiga darjah kebebasan dan pergerakan yang terhad kepada paksi lurus dalam tiga dimensi.