Downloaded 291 times

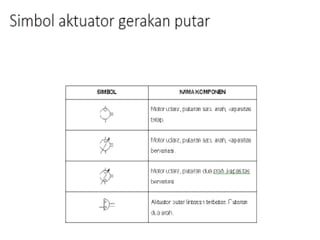
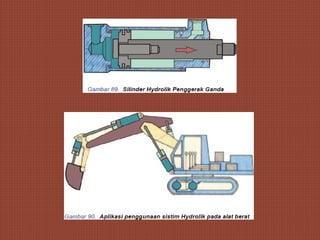

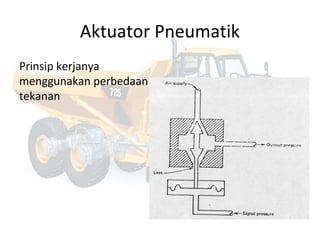

Dokumen tersebut membahas tentang aktuator, yaitu peralatan mekanis untuk menggerakkan atau mengontrol sistem. Terdapat tiga jenis aktuator utama yaitu aktuator elektrik, hidrolik, dan pneumatik. Aktuator bekerja dengan mengkonversi sinyal listrik atau tekanan cairan/gas menjadi gerakan mekanis. Aktuator elektrik paling mudah dikendalikan sedangkan aktuator hidrolik mampu menghasilkan




























































