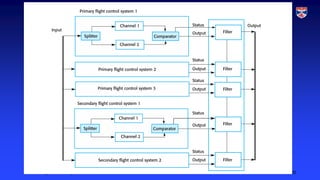
The Airbus flight control system utilizes a 'fly-by-wire' approach, replacing mechanical systems with electronic signals processed by computers to control the aircraft's surfaces. It features quintuple redundancy, meaning it has five flight control computers for reliability, allowing continued operation even with multiple failures. The system incorporates hardware and software diversity, self-monitoring architecture, and dynamic reconfiguration to ensure safe and effective flight control.