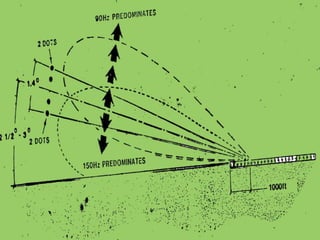
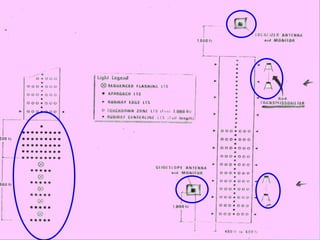
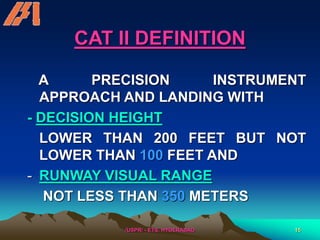
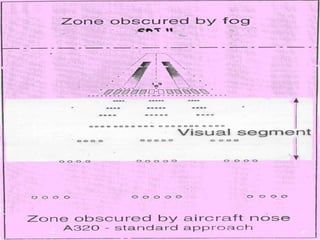
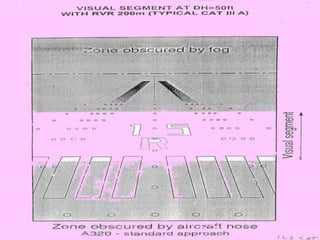
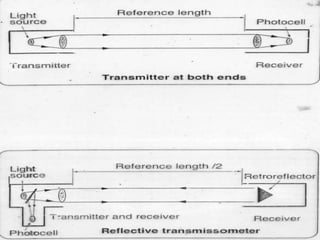
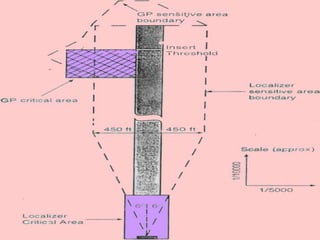
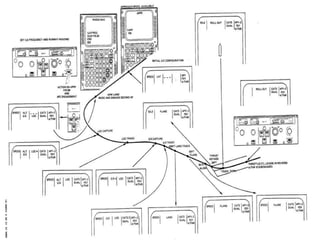
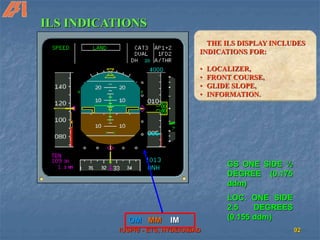
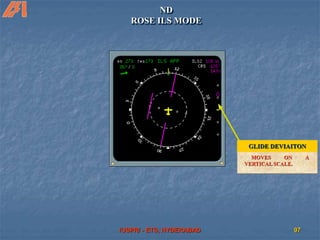
The document discusses the Instrument Landing System (ILS) used for landings in low visibility conditions. It describes the key components of the ILS including the localizer which defines the runway centerline and glide slope which defines the descent angle. It discusses different ILS categories (CAT I, II, III A,B,C) which allow landings at lower decision heights and visibility minimums. It also covers automatic landing systems, alert heights, visual references, transmissometers for measuring runway visual range and other technical details related to the ILS.






























































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)










