Download to read offline
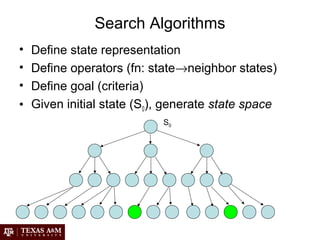
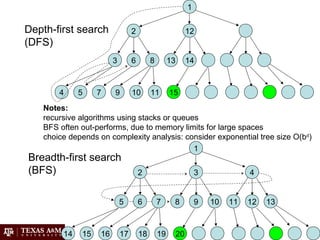
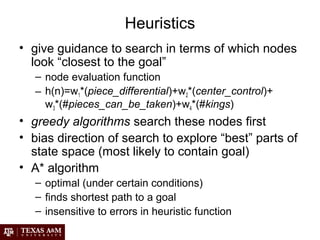
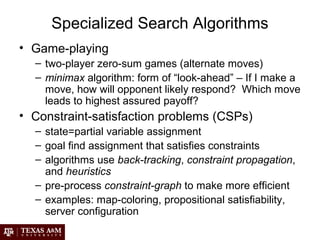
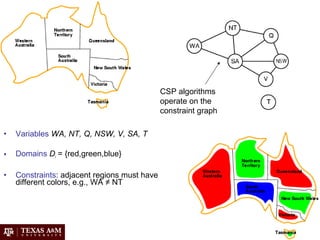
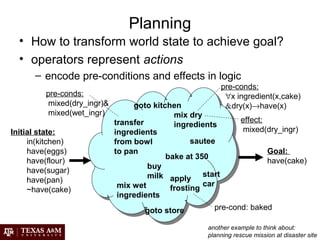
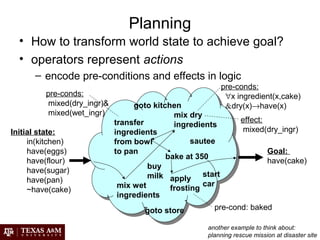
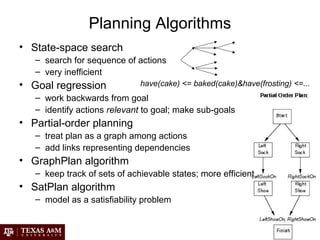
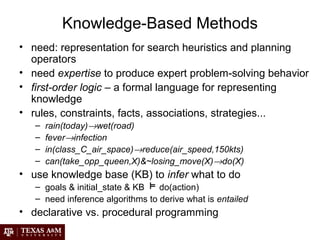


Artificial intelligence (AI) involves building intelligent agents that can perceive their environment and take actions to achieve goals. Different perspectives on AI include the philosophical question of what constitutes intelligence, the psychological perspective of human cognition, and the engineering approach of using AI to solve practical problems. Common techniques in AI include search algorithms, knowledge representation with logic, planning and problem solving with heuristics, and machine learning.