Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
DeNA
PPTX, PDF
3,104 views
ドライブレコーダ映像からの3次元空間認識 [MOBILITY:dev]
DeNAのAI本部AIシステム部 宮澤 一之 が 2019/10/31 に MOBILITY:dev で 登壇した内容をご紹介します。
Automotive
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Downloaded 37 times
1
/ 25
2
/ 25
Most read
3
/ 25
4
/ 25
Most read
5
/ 25
6
/ 25
7
/ 25
8
/ 25
9
/ 25
10
/ 25
11
/ 25
12
/ 25
13
/ 25
14
/ 25
15
/ 25
16
/ 25
17
/ 25
18
/ 25
19
/ 25
20
/ 25
21
/ 25
22
/ 25
23
/ 25
24
/ 25
25
/ 25
More Related Content
PDF
ChatGPTは思ったほど賢くない
by
Carnot Inc.
PDF
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
PDF
Teslaにおけるコンピュータビジョン技術の調査
by
Kazuyuki Miyazawa
PPTX
Tensor コアを使った PyTorch の高速化
by
Yusuke Fujimoto
PPTX
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
PDF
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
PDF
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
PDF
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
ChatGPTは思ったほど賢くない
by
Carnot Inc.
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
Teslaにおけるコンピュータビジョン技術の調査
by
Kazuyuki Miyazawa
Tensor コアを使った PyTorch の高速化
by
Yusuke Fujimoto
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
What's hot
PPTX
ドライブレコーダの動画を使った道路情報の自動差分抽出
by
Tetsutaro Watanabe
PPTX
【DL輪読会】EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Pointsfor...
by
Deep Learning JP
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
semantic segmentation サーベイ
by
yohei okawa
PPTX
DRIVE CHARTの裏側 〜 AI ☓ IoT ☓ ビッグデータを 支えるアーキテクチャ 〜
by
DeNA
PDF
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
AWSではじめるMLOps
by
MariOhbuchi
PPTX
動画像を用いた経路予測手法の分類
by
Tsubasa Hirakawa
PPTX
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
PDF
MLOps に基づく AI/ML 実運用最前線 ~画像、動画データにおける MLOps 事例のご紹介~(映像情報メディア学会2021年冬季大会企画セッショ...
by
NTT DATA Technology & Innovation
PDF
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...
by
Deep Learning JP
PPTX
【DL輪読会】"Instant Neural Graphics Primitives with a Multiresolution Hash Encoding"
by
Deep Learning JP
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PPTX
PyTorchLightning ベース Hydra+MLFlow+Optuna による機械学習開発環境の構築
by
Kosuke Shinoda
PDF
Cvpr 2021 manydepth
by
Kenta Tanaka
PPTX
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
PDF
モデルアーキテクチャ観点からのDeep Neural Network高速化
by
Yusuke Uchida
PDF
MLP-Mixer: An all-MLP Architecture for Vision
by
Kazuyuki Miyazawa
ドライブレコーダの動画を使った道路情報の自動差分抽出
by
Tetsutaro Watanabe
【DL輪読会】EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Pointsfor...
by
Deep Learning JP
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
semantic segmentation サーベイ
by
yohei okawa
DRIVE CHARTの裏側 〜 AI ☓ IoT ☓ ビッグデータを 支えるアーキテクチャ 〜
by
DeNA
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
AWSではじめるMLOps
by
MariOhbuchi
動画像を用いた経路予測手法の分類
by
Tsubasa Hirakawa
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
MLOps に基づく AI/ML 実運用最前線 ~画像、動画データにおける MLOps 事例のご紹介~(映像情報メディア学会2021年冬季大会企画セッショ...
by
NTT DATA Technology & Innovation
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...
by
Deep Learning JP
【DL輪読会】"Instant Neural Graphics Primitives with a Multiresolution Hash Encoding"
by
Deep Learning JP
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PyTorchLightning ベース Hydra+MLFlow+Optuna による機械学習開発環境の構築
by
Kosuke Shinoda
Cvpr 2021 manydepth
by
Kenta Tanaka
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
モデルアーキテクチャ観点からのDeep Neural Network高速化
by
Yusuke Uchida
MLP-Mixer: An all-MLP Architecture for Vision
by
Kazuyuki Miyazawa
Similar to ドライブレコーダ映像からの3次元空間認識 [MOBILITY:dev]
PDF
CVPR2013の論文紹介(車載カメラ関連)
by
Ken Sakurada
PPTX
20221101_DRM_PF(道路デジタルツイン).pptx
by
geo80k
PDF
20160525はじめてのコンピュータビジョン
by
Takuya Minagawa
PPTX
車両運行管理システムのためのデータ整備と機械学習の活用
by
Eiji Sekiya
PDF
車載カメラの映像から歩行者に関わる危険を予測する技術
by
Takuya Minagawa
PDF
Shogo Yamazaki Bachelor Thesis
by
pflab
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PPTX
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
PPTX
ドライブレコーダの画像認識による道路情報の自動差分抽出
by
Tetsutaro Watanabe
CVPR2013の論文紹介(車載カメラ関連)
by
Ken Sakurada
20221101_DRM_PF(道路デジタルツイン).pptx
by
geo80k
20160525はじめてのコンピュータビジョン
by
Takuya Minagawa
車両運行管理システムのためのデータ整備と機械学習の活用
by
Eiji Sekiya
車載カメラの映像から歩行者に関わる危険を予測する技術
by
Takuya Minagawa
Shogo Yamazaki Bachelor Thesis
by
pflab
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
ドライブレコーダの画像認識による道路情報の自動差分抽出
by
Tetsutaro Watanabe
More from DeNA
PPTX
IoTと業務システムをつなぐgRPC/RESTサービスの開発と運用
by
DeNA
PPTX
Can We Make Maps from Videos? ~From AI Algorithm to Engineering for Continuou...
by
DeNA
PDF
SHOWROOMとDeNAで取り組んだライブ配信基盤刷新・超低遅延ライブ配信の裏側【DeNA TechCon 2020 ライブ配信】
by
DeNA
PPTX
クラウド環境でのセキュリティ監査自動化【DeNA TechCon 2020 ライブ配信】
by
DeNA
PPTX
DeClang 誕生!Clang ベースのハッキング対策コンパイラ【DeNA TechCon 2020 ライブ配信】
by
DeNA
PDF
仕様起因の手戻りを減らして開発効率アップを目指すチャレンジ 【DeNA TechCon 2020 ライブ配信】
by
DeNA
PPTX
DeNA データプラットフォームにおける 自由と統制のバランス【DeNA TechCon 2020 ライブ配信】
by
DeNA
PPTX
リアルタイムリモートデバッグ環境によるゲーム開発イテレーションの高速化【DeNA TechCon 2020 ライブ配信】
by
DeNA
PDF
MOV の機械学習システムを支える MLOps 実践【DeNA TechCon 2020 ライブ配信】
by
DeNA
PDF
コンピュータビジョン技術の実応用〜DRIVE CHARTにおける脇見・車間距離不足検知〜【DeNA TechCon 2020 ライブ配信】
by
DeNA
PDF
DeNA の Slack 導入と活用の事例紹介
by
DeNA
PPTX
タクシーxAIを支えるKubernetesとAIデータパイプラインの信頼性の取り組みについて [SRE NEXT 2020]
by
DeNA
PPTX
オートモーティブ領域における 位置情報関連アルゴリズムあれこれ
by
DeNA
PPTX
後部座席タブレットにおけるMaaS時代を見据えた半歩先のUX設計」 [MOBILITY:dev]
by
DeNA
PPTX
MOVで実践したサーバーAPI実装の超最適化について [MOBILITY:dev]
by
DeNA
PPTX
MOV お客さま探索ナビの GCP ML開発フローについて
by
DeNA
PPTX
課題ドリブン、フルスタックAI開発術 [MOBILITY:dev]
by
DeNA
PPTX
DeNA の AWS アカウント管理とセキュリティ監査自動化
by
DeNA
PPTX
DeNAのQCTマネジメント IaaS利用のベストプラクティス [AWS Summit Tokyo 2019]
by
DeNA
PPTX
知っててもいいかもしれない知財のこと(抜粋版)
by
DeNA
IoTと業務システムをつなぐgRPC/RESTサービスの開発と運用
by
DeNA
Can We Make Maps from Videos? ~From AI Algorithm to Engineering for Continuou...
by
DeNA
SHOWROOMとDeNAで取り組んだライブ配信基盤刷新・超低遅延ライブ配信の裏側【DeNA TechCon 2020 ライブ配信】
by
DeNA
クラウド環境でのセキュリティ監査自動化【DeNA TechCon 2020 ライブ配信】
by
DeNA
DeClang 誕生!Clang ベースのハッキング対策コンパイラ【DeNA TechCon 2020 ライブ配信】
by
DeNA
仕様起因の手戻りを減らして開発効率アップを目指すチャレンジ 【DeNA TechCon 2020 ライブ配信】
by
DeNA
DeNA データプラットフォームにおける 自由と統制のバランス【DeNA TechCon 2020 ライブ配信】
by
DeNA
リアルタイムリモートデバッグ環境によるゲーム開発イテレーションの高速化【DeNA TechCon 2020 ライブ配信】
by
DeNA
MOV の機械学習システムを支える MLOps 実践【DeNA TechCon 2020 ライブ配信】
by
DeNA
コンピュータビジョン技術の実応用〜DRIVE CHARTにおける脇見・車間距離不足検知〜【DeNA TechCon 2020 ライブ配信】
by
DeNA
DeNA の Slack 導入と活用の事例紹介
by
DeNA
タクシーxAIを支えるKubernetesとAIデータパイプラインの信頼性の取り組みについて [SRE NEXT 2020]
by
DeNA
オートモーティブ領域における 位置情報関連アルゴリズムあれこれ
by
DeNA
後部座席タブレットにおけるMaaS時代を見据えた半歩先のUX設計」 [MOBILITY:dev]
by
DeNA
MOVで実践したサーバーAPI実装の超最適化について [MOBILITY:dev]
by
DeNA
MOV お客さま探索ナビの GCP ML開発フローについて
by
DeNA
課題ドリブン、フルスタックAI開発術 [MOBILITY:dev]
by
DeNA
DeNA の AWS アカウント管理とセキュリティ監査自動化
by
DeNA
DeNAのQCTマネジメント IaaS利用のベストプラクティス [AWS Summit Tokyo 2019]
by
DeNA
知っててもいいかもしれない知財のこと(抜粋版)
by
DeNA
ドライブレコーダ映像からの3次元空間認識 [MOBILITY:dev]
1.
ドライブレコーダ映像からの 3次元空間認識 宮澤一之 AI本部AIシステム部AI研究開発第二G 株式会社ディー・エヌ・エー
2.
自己紹介 2 @kzykmyzw 宮澤 一之 AI本部AIシステム部AI研究開発第二G 株式会社ディー・エヌ・エー 2007〜2010年 東北大学博士課程 2010〜2019年
電機メーカ研究所 2019年〜 DeNA 生体認証やステレオビジョンの研究に従事 日本学術振興会特別研究員(DC1) 映像符号化、標準化活動 車載・監視カメラ物体認識、外観検査 AI研究開発エンジニア(コンピュータビジョン技術)
3.
目次 3 次世代交通における地図 映像からの3次元空間認識技術 性能評価実験 1 3 まとめ4 2
4.
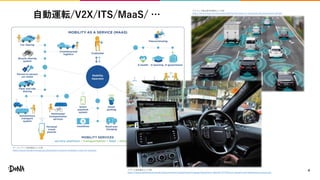
自動運転/V2X/ITS/MaaS/ … 4イギリス政府資料より引用 https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/737778/ccav-research-and-development-projects.pdf オーストラリア政府資料より引用 https://future.transport.nsw.gov.au/plans/future-transport-strategy/a-vision-for-transport アルゴンヌ国立研究所資料より引用 https://www.anl.gov/es/article/demystifying-the-future-of-connected-and-autonomous-vehicles
5.
次世代の地図 • 高度な交通社会の実現に向け、高精細な情報をリアルタイムに地図に反映 させることが求められている • 特殊なセンサを搭載した計測専用車両や人海戦術による地図の作成・メン テナンスだけではコストがかかりすぎる
5 首都高技術株式会社資料より引用 https://www.infradoctor.jp/details/detail20190313.pdf ©️OpenStreetMap contributors 動的情報 準動的情報 準静的情報 静的情報 Google LLC資料より引用 https://www.google.com/streetview/explore/
6.
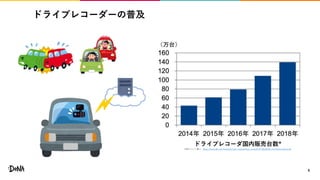
ドライブレコーダーの普及 6 ドライブレコーダ国内販売台数* *GfKジャパン調べ https://www.gfk.com/fileadmin/user_upload/dyna_content/JP/20190328_drivinngrecorders.pdf
7.
ドライブレコーダ映像からわかること 7
8.
ドライブレコーダ映像からわかること 8
9.
ドライブレコーダ映像からわかること 9
10.
ドライブレコーダ映像からわかること 10
11.
ドライブレコーダ映像からわかること 11
12.
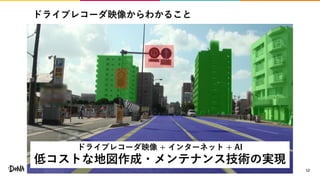
ドライブレコーダ映像からわかること 12 ドライブレコーダ映像 + インターネット
+ AI 低コストな地図作成・メンテナンス技術の実現
13.
コンピュータビジョン技術の急速な進化 13 R-FCN: Object Detection
via Region-based Fully Convolutional Networks https://arxiv.org/pdf/1605.06409v2.pdf OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields https://arxiv.org/pdf/1812.08008.pdf Panoptic Segmentation https://arxiv.org/pdf/1801.00868.pdf
14.
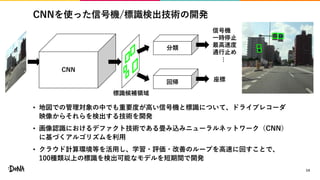
CNNを使った信号機/標識検出技術の開発 • 地図での管理対象の中でも重要度が高い信号機と標識について、ドライブレコーダ 映像からそれらを検出する技術を開発 • 画像認識におけるデファクト技術である畳み込みニューラルネットワーク(CNN) に基づくアルゴリズムを利用 •
クラウド計算環境等を活用し、学習・評価・改善のループを高速に回すことで、 100種類以上の標識を検出可能なモデルを短期間で開発 14 分類 回帰 信号機 一時停止 最高速度 通行止め 座標 … CNN 標識候補領域
15.
検出結果例 15
16.
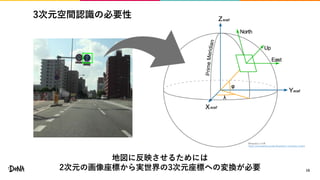
3次元空間認識の必要性 16 Wikipediaより引用 https://en.wikipedia.org/wiki/Geographic_coordinate_system 地図に反映させるためには 2次元の画像座標から実世界の3次元座標への変換が必要
17.
複数画像からの3次元復元 17 ワシントン大学資料より引用 https://grail.cs.washington.edu/rome/dubrovnik.avi
18.
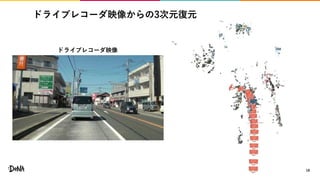
ドライブレコーダ映像からの3次元復元 18 ドライブレコーダ映像
19.
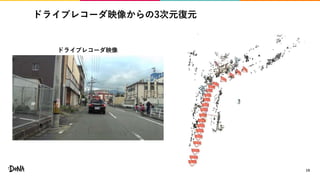
ドライブレコーダ映像からの3次元復元 19 ドライブレコーダ映像
20.
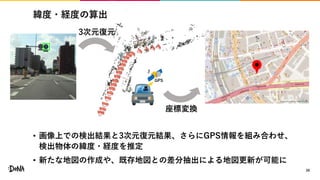
緯度・経度の算出 • 画像上での検出結果と3次元復元結果、さらにGPS情報を組み合わせ、 検出物体の緯度・経度を推定 • 新たな地図の作成や、既存地図との差分抽出による地図更新が可能に 20 ©️OpenStreetMap
contributors 3次元復元 座標変換 GPS
21.
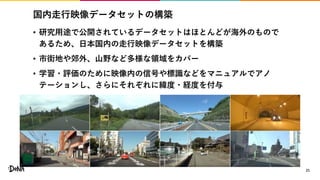
国内走行映像データセットの構築 • 研究用途で公開されているデータセットはほとんどが海外のもので あるため、日本国内の走行映像データセットを構築 • 市街地や郊外、山野など多様な領域をカバー •
学習・評価のために映像内の信号や標識などをマニュアルでアノ テーションし、さらにそれぞれに緯度・経度を付与 21
22.
緯度・経度の推定精度評価 22 推定したカメラ位置 推定した標識位置 実際の標識位置(真値) 誤差約0.2m ©️OpenStreetMap contributors ドライブレコーダ映像 精度評価結果 車両進行方向
23.
緯度・経度の推定精度評価 23 推定したカメラ位置 推定した標識位置 実際の標識位置(真値) 誤差約1.25m ©️OpenStreetMap contributors ドライブレコーダ映像 精度評価結果 車両進行方向
24.
緯度・経度の推定精度評価 24 推定したカメラ位置 推定した標識位置 実際の標識位置(真値) 誤差約13m ©️OpenStreetMap contributors ドライブレコーダ映像 精度評価結果 車両進行方向
25.
まとめ • 次世代の交通システムにおいては地図の正確性、リアルタイム性が重要となるが、 特殊車両や人海戦術による地図の作成・メンテナンスには限界がある • 急速に装着率が高まっているドライブレコーダの映像には、地図に必要な情報が 多く含まれており、近年大きな進歩が得られているコンピュータビジョン技術を 活用すればそれらの抽出が可能 •
3次元空間認識によりドライブレコーダ映像に写った物体の緯度・経度を求める技 術を自社で研究開発 • 評価用データセットを構築し、緯度・経度の高精度な推定が可能なことを確認 25 ドライブレコーダ映像 + インターネット + AI 低コストな地図作成・メンテナンス技術の実現
Editor's Notes
#3
まず簡単に自己紹介させていただきますが、私、宮澤と申します。 実はDeNAには入ってまだ半年でして、その前は電機メーカでR&Dをしておりました。 学生時代から画像を使ったコンピュータビジョン関連の研究をずっとやっておりまして、今おりますDeNAでもコンピュータビジョン関連のAI研究開発エンジニアをやっております。
#4
本日の発表ですが、まず背景として少し次世代の地図における課題をお話しします。 そして、その課題を解決するために我々が開発している技術と、その性能評価実験についてお話しします。 最後にまとめです。
#5
さて、伊藤先生のご講演でもありましたように、モビリティ業界では100年に一度の変革期などと言われておりますが、MaaSやV2X、自動運転など、次世代の交通社会を実現するための様々な技術やサービスが次々と出てきております。
#6
それらのコアとなる技術は多種多様ですが、地図というのも非常に重要なコンポーネントです。 従来の地図よりもさらに高精細で、リアルタイム性の高いHDマップやダイナミックマップなどと呼ばれる次世代の地図が必要と言われております。 こちらはダイナミックマップの例ですが、次世代の地図ではこのように従来の静的な地図に加えて、渋滞や工事情報、さらには人や車の動きなど、よりリアルタイム性の高い情報も扱えるようになる、と言われております。 これまで、地図の作成やメンテナンスには例えばレーザなどの計測器を搭載した特殊車両や、あるいは多数の調査員を使った人海戦術などが用いられてきましたが、こうした次世代の地図に対応していくためにはそうしたやり方だけでは時間やコストの観点から限界があります。
#7
そこで我々は、一般に急速に普及しつつあるドライブレコーダに着目しております。 現在、ドライブレコーダと保険を組み合わせたようなサービスは非常に多くありますし、我々DeNAでもドライブレコーダを使った安全運転支援のためのサービスなどを展開しております。 したがって今後もドライブレコーダを搭載した車というのはどんどん増えていくと考えられます。
#8
こちらは、実際のドライブレコーダの映像のフレームを切り出したものです。 これを見てみると、
#9
交通標識や、
#10
走行可能な道路領域、
#11
そこに書かれた区画線や、
#12
また周囲の建築物の情報など、地図の作成やメンテナンスに必要な情報が非常に豊富に含まれていることがわかります。
#13
つまり、たくさんの車に取り付けられたドライブレコーダの映像をインターネットを通して集め、そこから必要な情報を抽出すれば、地図の作成やメンテナンスを非常に低コストに行えるのではないかと考えております。 そこで重要となってくるのが、映像から情報を抽出するためのAI技術、特にコンピュータビジョンと呼ばれる技術となります。
#14
みなさんもご存知のとおり、ディープラーニングが登場したことによって、映像や画像を解析するコンピュータビジョン技術はこれまでにないレベルで急速に発展しています。 画像から特定の物体を検出するというタスクではすでに人間を上回ったとも言われておりますし、それだけでなくこのように多数の人が写っているシーンでそれぞれの人の姿勢を認識したり、画像中に写っている一つ一つの物体を画素単位で認識することも可能となっております。
#15
そこで我々はまず、地図で管理されている対象の中でもモビリティ観点で特に重要となる信号機や交通標識をドライブレコーダの映像から検出する技術の開発に着手しました。 ここでは、先ほども説明したディープラーニング、特に、画像認識でデファクトスタンダードとなっている畳み込みニューラルネットワーク、CNNと呼ばれる技術を使っています。 CNNの学習や評価、パラメータ調整には非常に大きなマシンパワーが必要になりますが、我々はクラウド計算環境を効率的に運用し、学習、評価、改善のループを高速に回す仕組みを作っています。 これにより、日本の標識100種類以上を認識可能なモデルを短期間で開発することができました。
#16
実際にドライブレコーダの映像から我々の検出モデルが標識や信号を検出する様子をご覧ください。 画像中の標識の位置はもちろん、その種類まで正しく識別できています。
#17
さて、これで画像中に写った対象物体を2次元の画像の中で検出することはできるようになったわけですが、これではまだ不十分です。 というのも、あくまでも画像からの検出で得られるのは、物体の画像中の位置に過ぎず、我々がいる実世界の座標とはなんの関係もありません。 画像から得られた2次元の情報を地図に反映させるためには、我々がいる3次元の世界に変換してやる必要があります。 2次元の画像に写っているのは、3次元の世界から投影されたものですが、それを再び3次元に戻すのは容易ではありません。基本的に、1枚の画像だけではその問題を解くことができません。 しかし、たくさんの画像を使うことによって、2次元の画像から3次元の情報を復元することが可能となります。
#18
こちらは、その非常に大規模な例ですが、写真共有サイトからダウンロードできる膨大な枚数の画像を使って、ヨーロッパの街並み全体を3次元復元した例になります。 黒で示されている四角錐ひとつひとつがカメラの位置と姿勢を表していて、周囲に雲のように存在しているのが、復元された街並みの3次元点になります。 このように、多数のカメラの画像さえあれば、街全体のような3次元復元も可能になります。 実は、ドライブレコーダ映像というのは、たくさんの静止画の連続ですから、車が動いていれば、その動きに従ってたくさんの位置からたくさんの静止画を撮影したものと考えることができます。 つまり、これと同様の技術を使うことで、ドライブレコーダ映像からの3次元復元ができるということになります。
#19
そこで我々は実際に、ドライブレコーダ映像からの3次元復元技術にトライしました。 こちら入力している映像です。最後に車両が左方向に曲がっていきます。 この映像から、3次元復元した結果がこちらになります。赤の四角錐がカメラの位置で、これが車の動きに相当します。 こちらの映像と見比べてわかるように、車の3次元的な動きを正しく求められていることがわかります。 周囲の3次元点についてはスパースにしか得られていませんが、我々の目的は街全体を3次元復元することではなく、地図の作成やメンテナンスに必要な対象物体の3次元情報を抽出することなので、これで十分な結果です。
#20
こちらはまた別の例です。
#21
このようにドライブレコーダ映像から3次元復元を行い、その結果から対象物体の緯度経度を算出します。 ここでは、ドライブレコーダなどに内蔵されているGPSの情報を使い、すでに求めた物体の3次元座標の変換を行います。 このようにすることで、映像から検出した物体を地図上で扱うことが可能となり、新しい地図を作成したり、すでに持っている地図と比較することでメンテナンスが必要な箇所を特定することができるようになります。
#22
さて、これまでご紹介したような技術の開発や評価を行うためには、当然ながらデータセットが必要になります。現在、研究用途で多くのデータセットが公開されていますが、ほとんどが海外の企業や大学により集められたものであり、日本の映像を集めたデータセットはほとんどありません。そこで我々は国内の道路を走行した映像を集めてデータセットを構築し、アノテーションをして自社内での研究開発に利用しています。
#23
このデータセットを使って、我々が開発した映像からの物体検出と緯度経度の推定精度を評価しました。 その一部をご紹介します。まずこちらが入力映像で、途中に現れるこの止まれ標識が対象物体です。 この標識を映像から検出し、緯度経度を求めて地図に表すと、このようになります。 我々のデータセットでは、それぞれの物体に緯度経度を付与していますので、それを真値として推定結果との誤差を求めると約20cmと、非常に正確に推定できていることがわかります。 20191001_01/08_7-112-1858-236-19860027_1
#24
またこちらは別の例です。こちらは、この標識が対象です。 こちらの推定精度は1.25mとなっています。 20191001_01/02_7-112-1851-236-19729609_1/
#25
場合によっては、誤差がやや大きくなるケースもあります。この例では、誤差が10mを超えてしまっています。 今回ご紹介した方法では、最後の緯度経度への変換をGPSに頼っているため、GPS誤差に大きな影響を受けてしまいます。 GPSの単独測位の精度が10〜20mですから、この誤差10mというのもそれほど悪くない精度であると考えています。 今後、GPSの誤差を補正するような技術についても、引き続き開発していく必要があると考えています。 20191001_01/01_7-112-1852-241-15730391_2
#26
以上、我々が現在開発している、ドライブレコーダ映像からの物体検出と3次元復元に基づく地図の作成やメンテナンスに向けた技術をご紹介しました。急速に進展しているコンピュータビジョン技術を取り入れることで、高コストなセンサなどを用いなくても、ドライブレコーダ映像だけで地図に必要な情報を高精度に抽出可能であることが確認できています。しかしまだ実用化に向けて多くの課題が残っておりますので、引き続き研究開発を続け、低コストな地図作成・メンテナンス技術の実現を目指していきたいと思います。
Download
























![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)

























![タクシーxAIを支えるKubernetesとAIデータパイプラインの信頼性の取り組みについて [SRE NEXT 2020]](https://cdn.slidesharecdn.com/ss_thumbnails/202001srenext-200125032719-thumbnail.jpg?width=640&height=640&fit=bounds)

![後部座席タブレットにおけるMaaS時代を見据えた半歩先のUX設計」 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevyoneyama-191031085554-thumbnail.jpg?width=640&height=640&fit=bounds)
![MOVで実践したサーバーAPI実装の超最適化について [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevera-191031084650-thumbnail.jpg?width=640&height=640&fit=bounds)

![課題ドリブン、フルスタックAI開発術 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevkuzuoka-191031073741-thumbnail.jpg?width=640&height=640&fit=bounds)

![DeNAのQCTマネジメント IaaS利用のベストプラクティス [AWS Summit Tokyo 2019]](https://cdn.slidesharecdn.com/ss_thumbnails/aws-summit-tokyo-2019-kei-190617011042-thumbnail.jpg?width=640&height=640&fit=bounds)
