Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hiroki Itô
PDF, PPTX
42,852 views
状態空間モデルの実行方法と実行環境の比較
第61回日本生態学会大会(2014年3月、広島)での発表資料。
Data & Analytics
◦
Read more
56
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 51
2
/ 51
3
/ 51
4
/ 51
5
/ 51
6
/ 51
7
/ 51
8
/ 51
9
/ 51
10
/ 51
11
/ 51
12
/ 51
13
/ 51
14
/ 51
15
/ 51
16
/ 51
17
/ 51
18
/ 51
19
/ 51
20
/ 51
21
/ 51
22
/ 51
23
/ 51
24
/ 51
25
/ 51
26
/ 51
27
/ 51
28
/ 51
29
/ 51
30
/ 51
31
/ 51
32
/ 51
33
/ 51
34
/ 51
35
/ 51
36
/ 51
37
/ 51
38
/ 51
39
/ 51
40
/ 51
41
/ 51
42
/ 51
43
/ 51
44
/ 51
45
/ 51
46
/ 51
47
/ 51
48
/ 51
49
/ 51
50
/ 51
51
/ 51
More Related Content
PDF
Rパッケージ“KFAS”を使った時系列データの解析方法
by
Hiroki Itô
PDF
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
PDF
統計的学習の基礎 5章前半(~5.6)
by
Kota Mori
PDF
Chapter9 一歩進んだ文法(前半)
by
itoyan110
PDF
階層モデルの分散パラメータの事前分布について
by
hoxo_m
PDF
[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent
by
Deep Learning JP
PDF
階層ベイズによるワンToワンマーケティング入門
by
shima o
PDF
統計的学習の基礎 第2章後半
by
Prunus 1350
Rパッケージ“KFAS”を使った時系列データの解析方法
by
Hiroki Itô
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
統計的学習の基礎 5章前半(~5.6)
by
Kota Mori
Chapter9 一歩進んだ文法(前半)
by
itoyan110
階層モデルの分散パラメータの事前分布について
by
hoxo_m
[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent
by
Deep Learning JP
階層ベイズによるワンToワンマーケティング入門
by
shima o
統計的学習の基礎 第2章後半
by
Prunus 1350
What's hot
PPTX
【読書会資料】『StanとRでベイズ統計モデリング』Chapter12:時間や空間を扱うモデル
by
Masashi Komori
PDF
Stanとdlmによる状態空間モデル
by
Hiroki Itô
PDF
Stanの便利な事後処理関数
by
daiki hojo
PDF
Stanでガウス過程
by
Hiroshi Shimizu
PDF
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
PPTX
[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...
by
Deep Learning JP
PDF
パターン認識 第10章 決定木
by
Miyoshi Yuya
PDF
統計的学習の基礎6章前半 #カステラ本
by
Akifumi Eguchi
PDF
自由エネルギー原理と視覚的意識 2019-06-08
by
Masatoshi Yoshida
PPTX
Tokyo.R #46 Cox比例ハザードモデルとその周辺
by
kikurage1001
PDF
第8章 ガウス過程回帰による異常検知
by
Chika Inoshita
PDF
Rで学ぶ回帰分析と単位根検定
by
Nagi Teramo
PDF
統計的学習理論チュートリアル: 基礎から応用まで (Ibis2012)
by
Taiji Suzuki
PPTX
PRML6.4
by
hiroki yamaoka
PDF
Autoencoderの実装と愉快な仲間との比較
by
YumaMatsuoka
PPTX
RとPythonを比較する
by
Joe Suzuki
PDF
比例ハザードモデルはとってもtricky!
by
takehikoihayashi
PPTX
分割時系列解析(ITS)の入門
by
Koichiro Gibo
PDF
記号創発ロボティクスの狙い
by
Tadahiro Taniguchi
PPTX
Deep forest
by
naoto moriyama
【読書会資料】『StanとRでベイズ統計モデリング』Chapter12:時間や空間を扱うモデル
by
Masashi Komori
Stanとdlmによる状態空間モデル
by
Hiroki Itô
Stanの便利な事後処理関数
by
daiki hojo
Stanでガウス過程
by
Hiroshi Shimizu
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...
by
Deep Learning JP
パターン認識 第10章 決定木
by
Miyoshi Yuya
統計的学習の基礎6章前半 #カステラ本
by
Akifumi Eguchi
自由エネルギー原理と視覚的意識 2019-06-08
by
Masatoshi Yoshida
Tokyo.R #46 Cox比例ハザードモデルとその周辺
by
kikurage1001
第8章 ガウス過程回帰による異常検知
by
Chika Inoshita
Rで学ぶ回帰分析と単位根検定
by
Nagi Teramo
統計的学習理論チュートリアル: 基礎から応用まで (Ibis2012)
by
Taiji Suzuki
PRML6.4
by
hiroki yamaoka
Autoencoderの実装と愉快な仲間との比較
by
YumaMatsuoka
RとPythonを比較する
by
Joe Suzuki
比例ハザードモデルはとってもtricky!
by
takehikoihayashi
分割時系列解析(ITS)の入門
by
Koichiro Gibo
記号創発ロボティクスの狙い
by
Tadahiro Taniguchi
Deep forest
by
naoto moriyama
Viewers also liked
PDF
Data assim r
by
Xiangze
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
PDF
バンディットアルゴリズム入門と実践
by
智之 村上
PDF
マルコフ連鎖モンテカルロ法入門-1
by
Nagi Teramo
PDF
分析のビジネス展開を考える―状態空間モデルを例に @TokyoWebMining #47
by
horihorio
PPTX
MCMCによる回帰分析@ベイズセミナー
by
Takashi Yamane
PDF
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
PDF
生存時間分析の書き方
by
Yasuyuki Okumura
PDF
5分でわかるかもしれないglmnet
by
Nagi Teramo
PDF
R stan導入公開版
by
考司 小杉
PDF
『予測にいかす統計モデリングの基本』の売上データの分析をトレースしてみた
by
. .
PPTX
カルマンフィルタについて
by
tiny_ak
PPT
Hidrogeología básica de la Península de Yucatán
by
Emiliano Monroy Ríos
PPT
Agitacion
by
guest6d731e
PDF
FCN-Based 6D Robotic Grasping for Arbitrary Placed Objects
by
Kusano Hitoshi
PDF
論文紹介 Combining Model-Based and Model-Free Updates for Trajectory-Centric Rein...
by
Kusano Hitoshi
PDF
機械の代わりに人間が学習入門
by
Shuyo Nakatani
ODP
Ml ch7
by
Ryo Higashigawa
Data assim r
by
Xiangze
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
バンディットアルゴリズム入門と実践
by
智之 村上
マルコフ連鎖モンテカルロ法入門-1
by
Nagi Teramo
分析のビジネス展開を考える―状態空間モデルを例に @TokyoWebMining #47
by
horihorio
MCMCによる回帰分析@ベイズセミナー
by
Takashi Yamane
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
生存時間分析の書き方
by
Yasuyuki Okumura
5分でわかるかもしれないglmnet
by
Nagi Teramo
R stan導入公開版
by
考司 小杉
『予測にいかす統計モデリングの基本』の売上データの分析をトレースしてみた
by
. .
カルマンフィルタについて
by
tiny_ak
Hidrogeología básica de la Península de Yucatán
by
Emiliano Monroy Ríos
Agitacion
by
guest6d731e
FCN-Based 6D Robotic Grasping for Arbitrary Placed Objects
by
Kusano Hitoshi
論文紹介 Combining Model-Based and Model-Free Updates for Trajectory-Centric Rein...
by
Kusano Hitoshi
機械の代わりに人間が学習入門
by
Shuyo Nakatani
Ml ch7
by
Ryo Higashigawa
Similar to 状態空間モデルの実行方法と実行環境の比較
PPTX
NagoyaStat#7 StanとRでベイズ統計モデリング(アヒル本)4章の発表資料
by
nishioka1
PDF
RStanとShinyStanによるベイズ統計モデリング入門
by
Masaki Tsuda
PDF
MCMCサンプルの使い方 ~見る・決める・探す・発生させる~
by
. .
PDF
Stanコードの書き方 中級編
by
Hiroshi Shimizu
PPTX
RとStanで分散分析
by
人斬り 抜刀斎
PDF
Yamadai.Rデモンストレーションセッション
by
考司 小杉
PDF
モンテカルロサンプリング
by
Kosei ABE
PPTX
Mplus tutorial
by
考司 小杉
PDF
みどりぼん9章前半
by
Akifumi Eguchi
PPT
R intro
by
yayamamo @ DBCLS Kashiwanoha
PDF
データ解析のための統計モデリング入門9章後半
by
Motoya Wakiyama
PPTX
MCMC and greta package社内勉強会用スライド
by
Shuma Ishigami
PDF
空間統計を使って地価分布図を描いてみる
by
Yukihiro NAKAJIMA
PDF
20140920 tokyo r43
by
Takashi Kitano
PPTX
第七回統計学勉強会@東大駒場
by
Daisuke Yoneoka
PDF
StanTutorial
by
Teito Nakagawa
PDF
R_note_01_ver1.1
by
Satoshi Kume
PDF
Tokyo r94 beginnerssession3
by
kotora_0507
PDF
SappoRo.R #2 初心者向けWS資料
by
考司 小杉
PDF
データ解析のための統計モデリング入門9章後半
by
Motoya Wakiyama
NagoyaStat#7 StanとRでベイズ統計モデリング(アヒル本)4章の発表資料
by
nishioka1
RStanとShinyStanによるベイズ統計モデリング入門
by
Masaki Tsuda
MCMCサンプルの使い方 ~見る・決める・探す・発生させる~
by
. .
Stanコードの書き方 中級編
by
Hiroshi Shimizu
RとStanで分散分析
by
人斬り 抜刀斎
Yamadai.Rデモンストレーションセッション
by
考司 小杉
モンテカルロサンプリング
by
Kosei ABE
Mplus tutorial
by
考司 小杉
みどりぼん9章前半
by
Akifumi Eguchi
R intro
by
yayamamo @ DBCLS Kashiwanoha
データ解析のための統計モデリング入門9章後半
by
Motoya Wakiyama
MCMC and greta package社内勉強会用スライド
by
Shuma Ishigami
空間統計を使って地価分布図を描いてみる
by
Yukihiro NAKAJIMA
20140920 tokyo r43
by
Takashi Kitano
第七回統計学勉強会@東大駒場
by
Daisuke Yoneoka
StanTutorial
by
Teito Nakagawa
R_note_01_ver1.1
by
Satoshi Kume
Tokyo r94 beginnerssession3
by
kotora_0507
SappoRo.R #2 初心者向けWS資料
by
考司 小杉
データ解析のための統計モデリング入門9章後半
by
Motoya Wakiyama
状態空間モデルの実行方法と実行環境の比較
1.
状態空間モデルの 実行方法と 実行環境の比較 森林総合研究所 伊東宏樹 2014年3月16日 第61回日本生態学会大会(広島) T13 生態学における状態空間モデルの利用
2.
本日とりあつかうソフトウェア • Rパッケージ • dlm •
KFAS • MCMC • BUGS言語 • Stan
3.
サンプルコードなどの置き場所 http://www001.upp.so-net.ne.jp/ito-hi/stat/2014ESJ/
4.
Statistical Software for State Space Models Commandeur
et al. (2011) Journal of Statistical Software 41(1)
5.
State Space Models in
R Petris & Petrone (2011) Journal of Statistical Software 41(4)
6.
dlm
7.
dlm • Dynamic Linear
Model (動的線形モデル) • 線形+正規分布 • カルマンフィルタ • パラメータ推定 • 最尤推定/ベイズ推定
8.
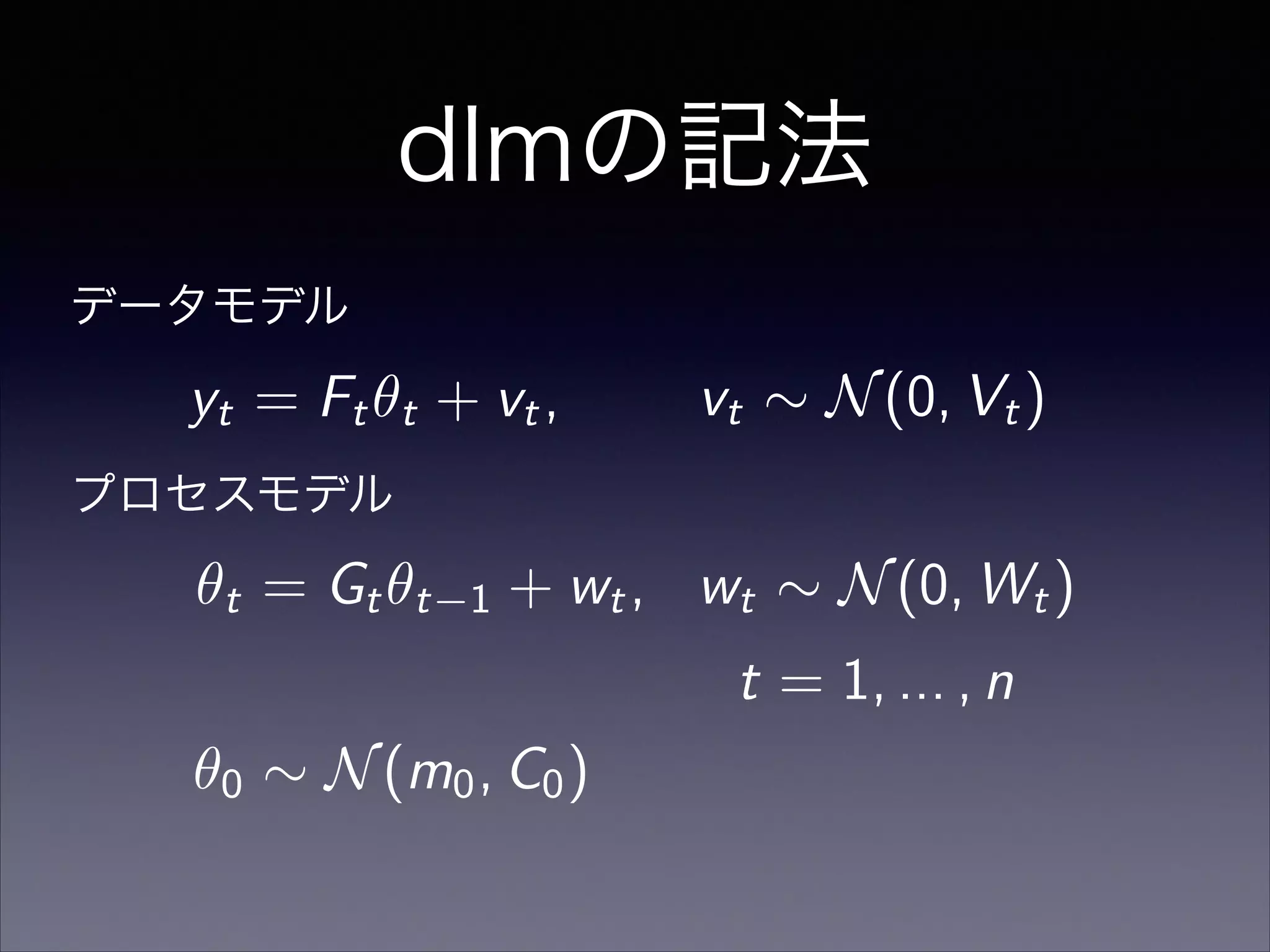
dlmの記法 ✓0 ⇠ N(m0,
C0) ✓t = Gt✓t 1 + wt, wt ⇠ N(0, Wt) t = 1, ... , n データモデル プロセスモデル yt = Ft✓t + vt, vt ⇠ N(0, Vt)
9.
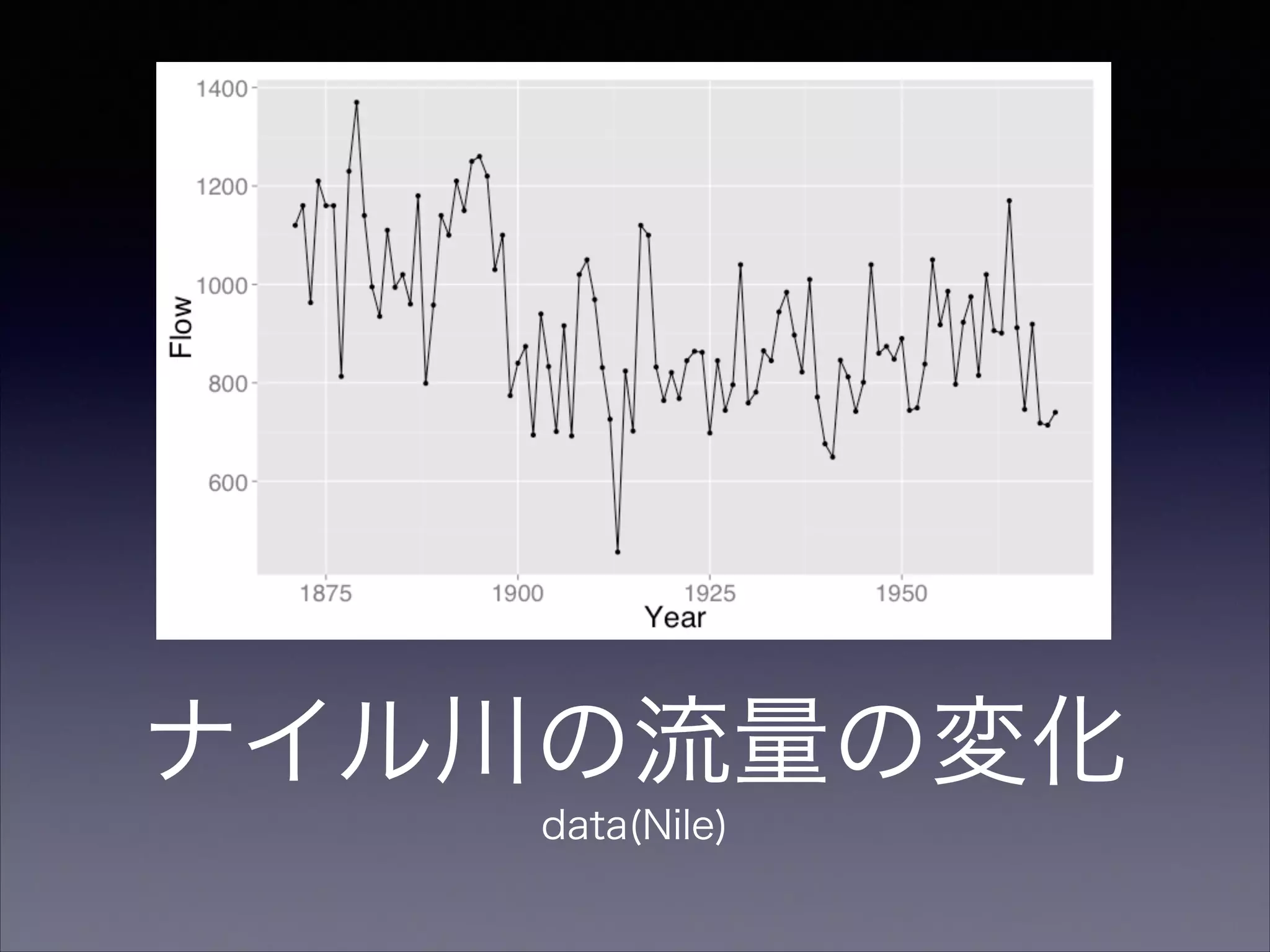
ナイル川の流量の変化 data(Nile)
10.
dlmによるLocal Level Model Petris
and Petrone (2011)より ## build functionの定義! BuildLLM <- function(theta) {! dlmModPoly(order = 1,! dV = theta[1],! dW = theta[2])! } このような関数を定義しておく。
11.
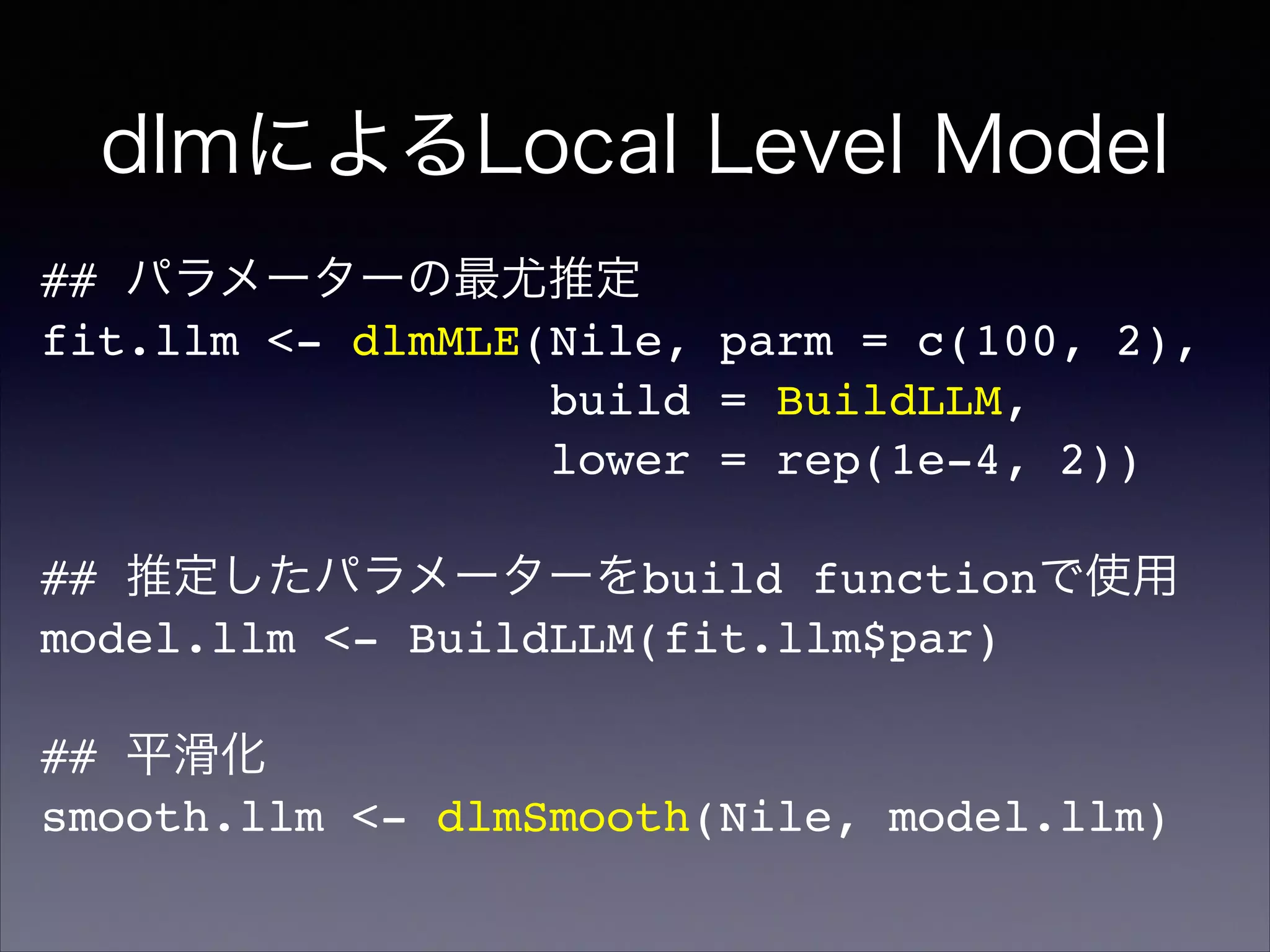
dlmによるLocal Level Model ##
パラメーターの最尤推定! fit.llm <- dlmMLE(Nile, parm = c(100, 2),! build = BuildLLM,! lower = rep(1e-4, 2))! ! ## 推定したパラメーターをbuild functionで使用! model.llm <- BuildLLM(fit.llm$par)! ! ## 平滑化! smooth.llm <- dlmSmooth(Nile, model.llm)
12.
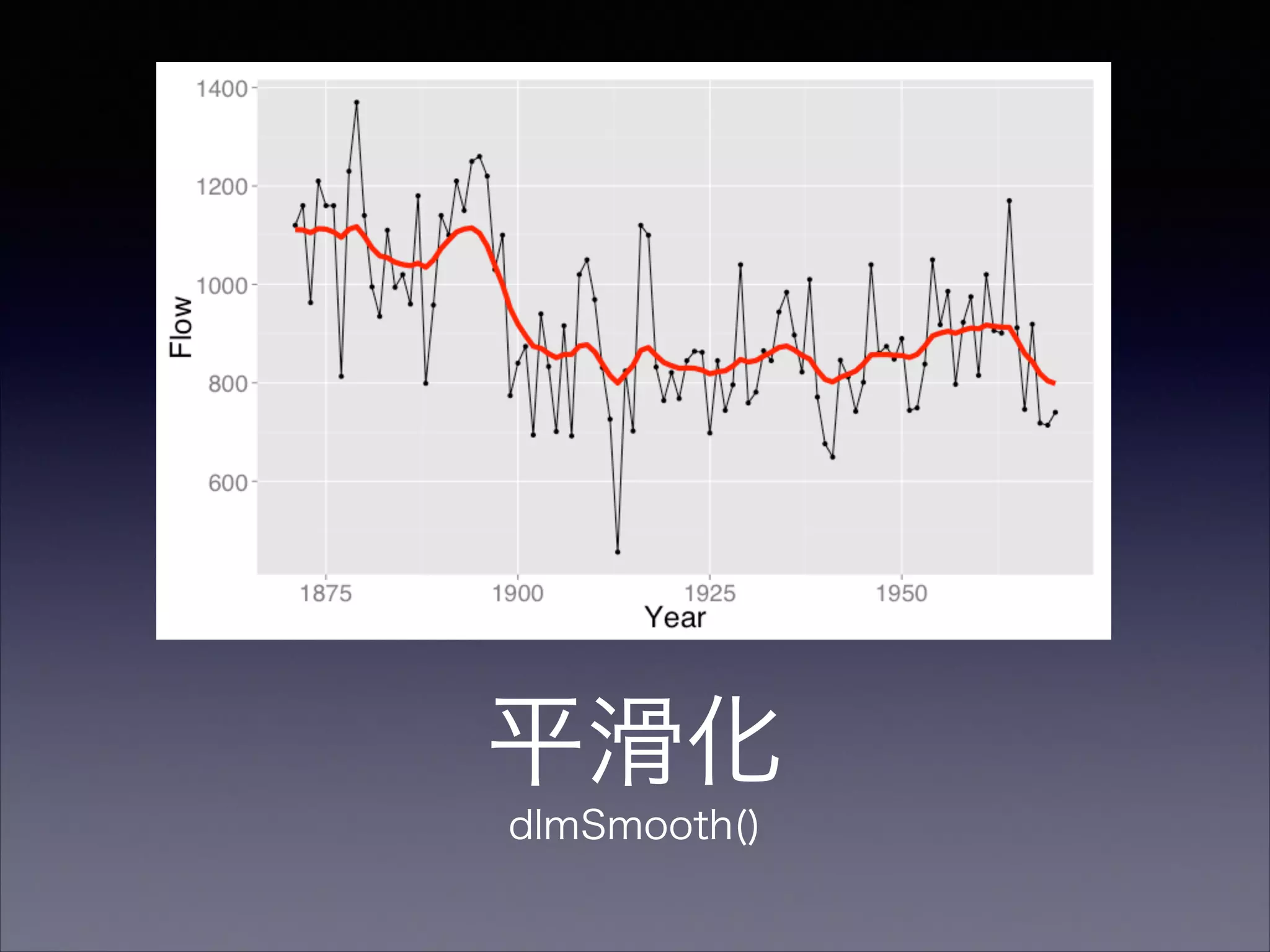
平滑化 dlmSmooth()
13.
ナイル川の流量の変化 data(Nile) アスワンダム着工
14.
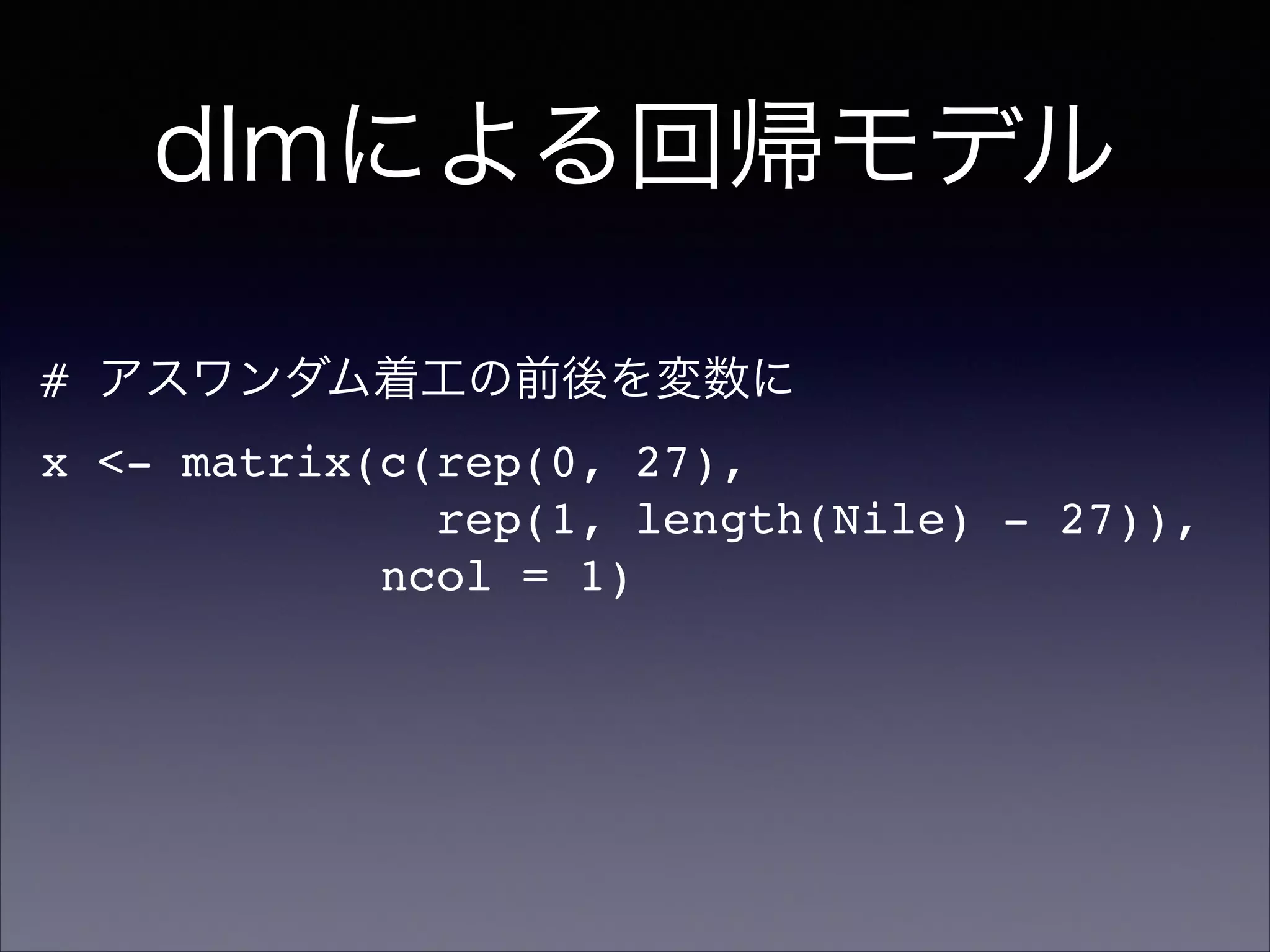
dlmによる回帰モデル # アスワンダム着工の前後を変数に! x <-
matrix(c(rep(0, 27),! rep(1, length(Nile) - 27)),! ncol = 1)
15.
dlmによる回帰モデル ## モデル定義! model.reg <-
dlmModReg(x, dW = c(1, 0))! BuildReg <- function(theta) {! V(model.reg) <- exp(theta[1])! diag(W(model.reg))[1] <- exp(theta[2])! return(model.reg)! }
16.
dlmによる回帰モデル ## 最尤推定! fit.reg <-
dlmMLE(Nile,! parm = rep(0, 2),! build = BuildReg)! model.reg <- BuildReg(fit.reg$par)! smooth.reg <- dlmSmooth(Nile,! mod = model.reg)
17.
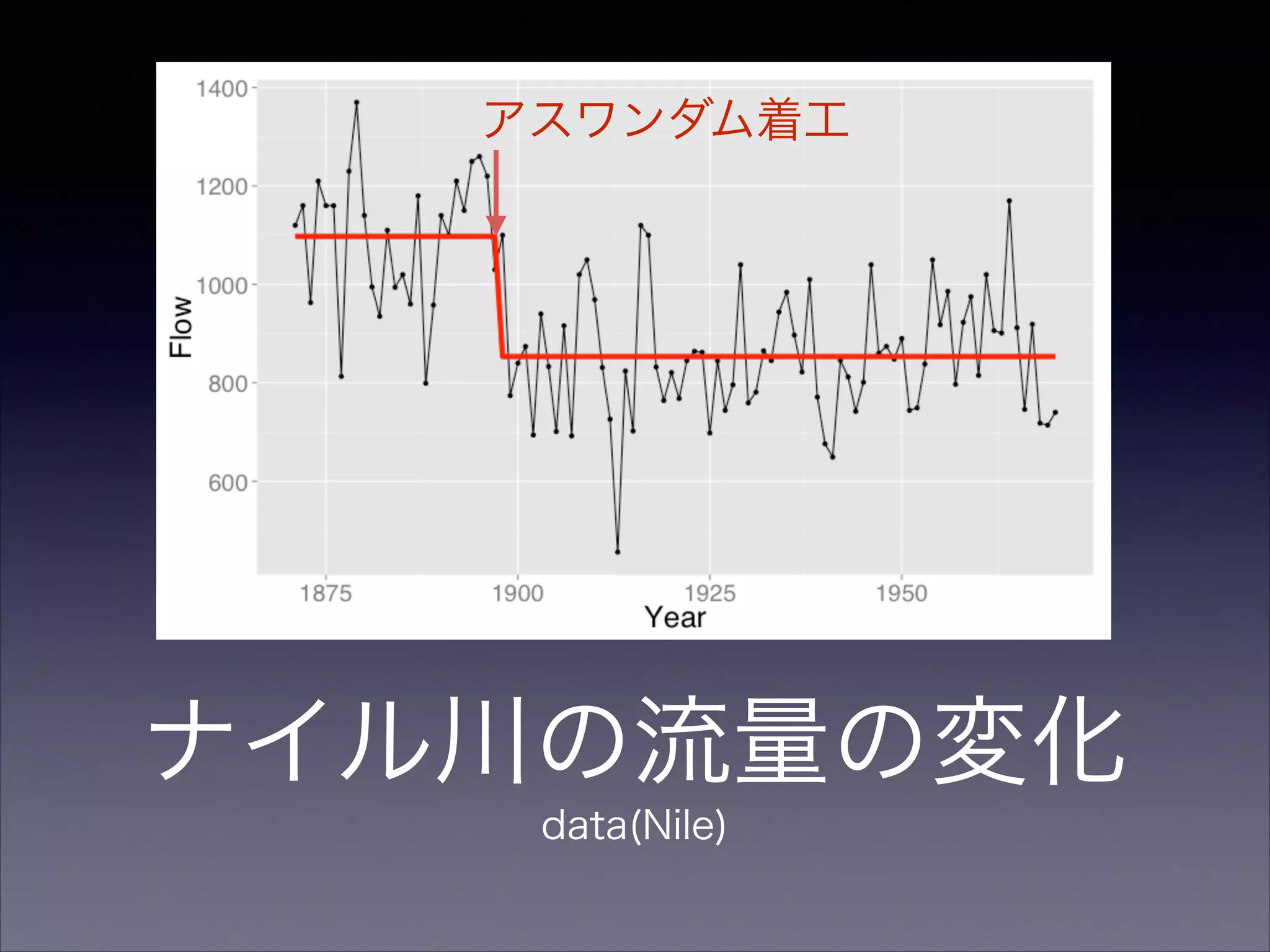
ナイル川の流量の変化 data(Nile) アスワンダム着工
18.
dlmの文献 • Petris G,
Petrone S, Campagnoli (2009) Dynamic Linear Models with R Springer • 和合肇(監訳)・萩原淳一郎(訳)(2013)「R によるベイジアン動的線形モデル」朝倉書店 • Petris G (2010) An R package for dynamic linear models. Journal of Statistical Software 36(12)
19.
KFAS
20.
KFAS • Kalman Filter
and Smoother for Exponential Family State Space Models • 正規分布以外の分布(ポアソン分布など)を扱 える • 最尤推定
21.
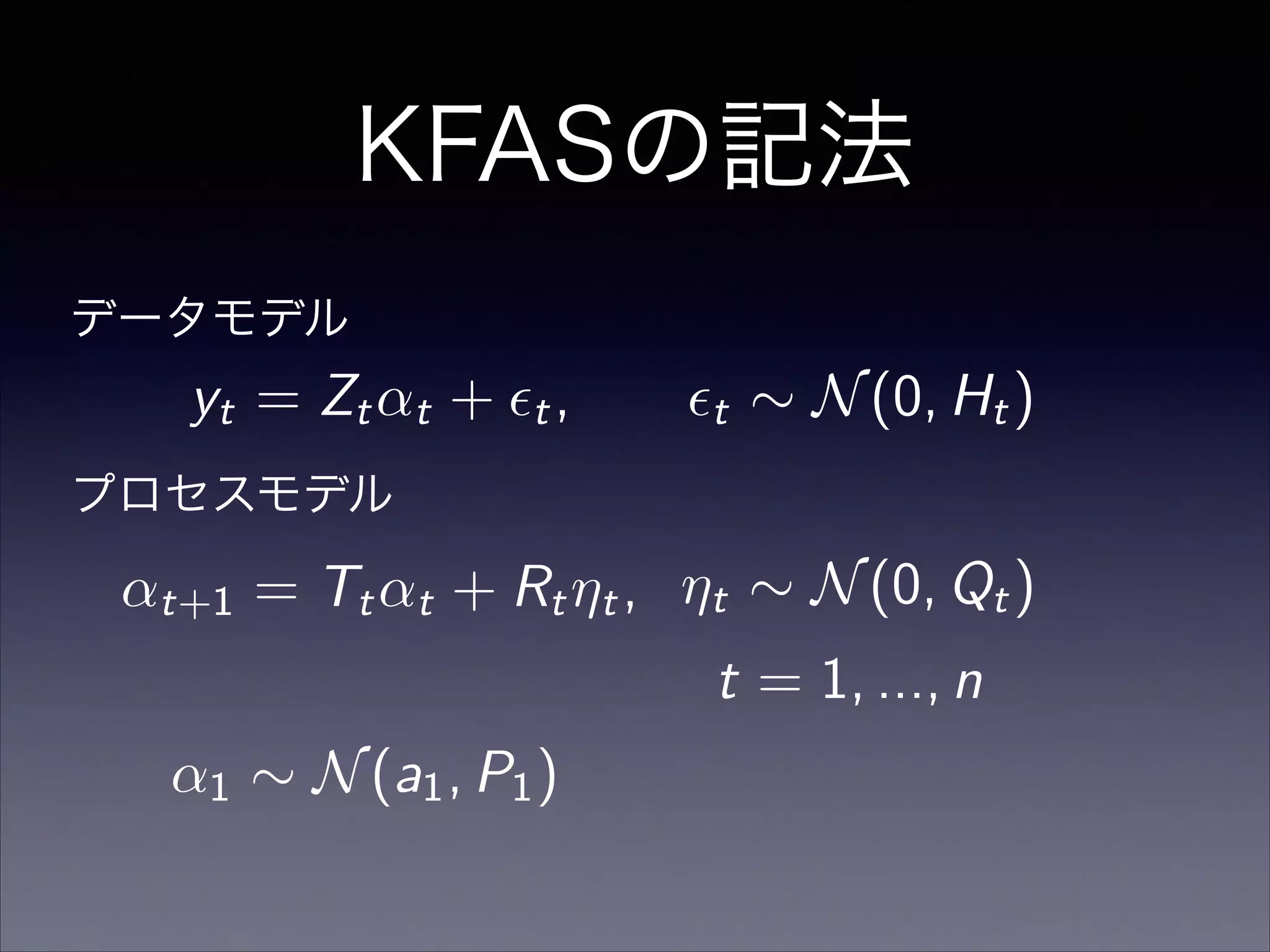
KFASの記法 t = 1,
..., n ↵1 ⇠ N(a1, P1) プロセスモデル データモデル yt = Zt↵t + ✏t, ✏t ⇠ N(0, Ht) ↵t+1 = Tt↵t + Rt⌘t, ⌘t ⇠ N(0, Qt)
22.
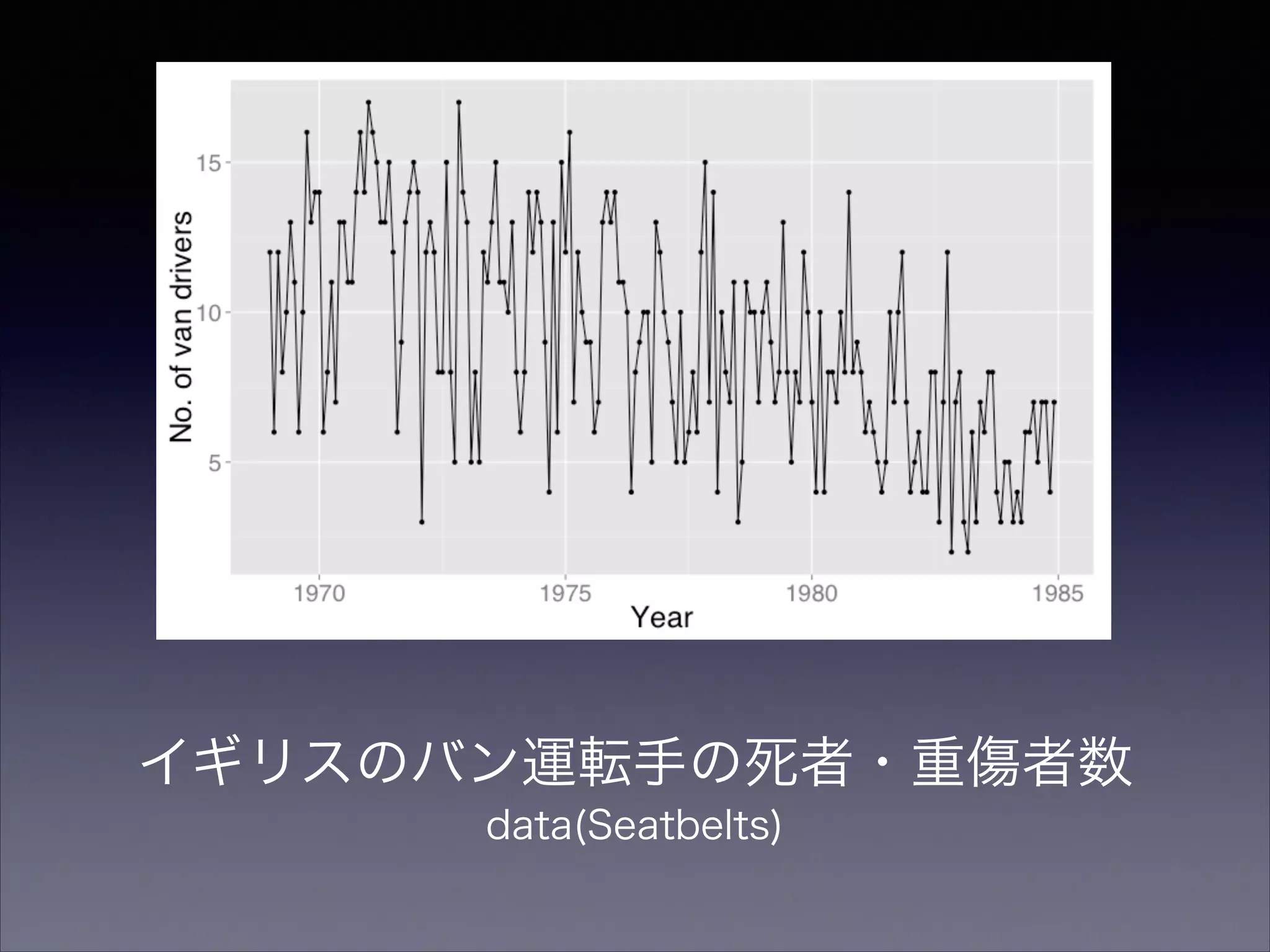
イギリスのバン運転手の死者・重傷者数 data(Seatbelts)
23.
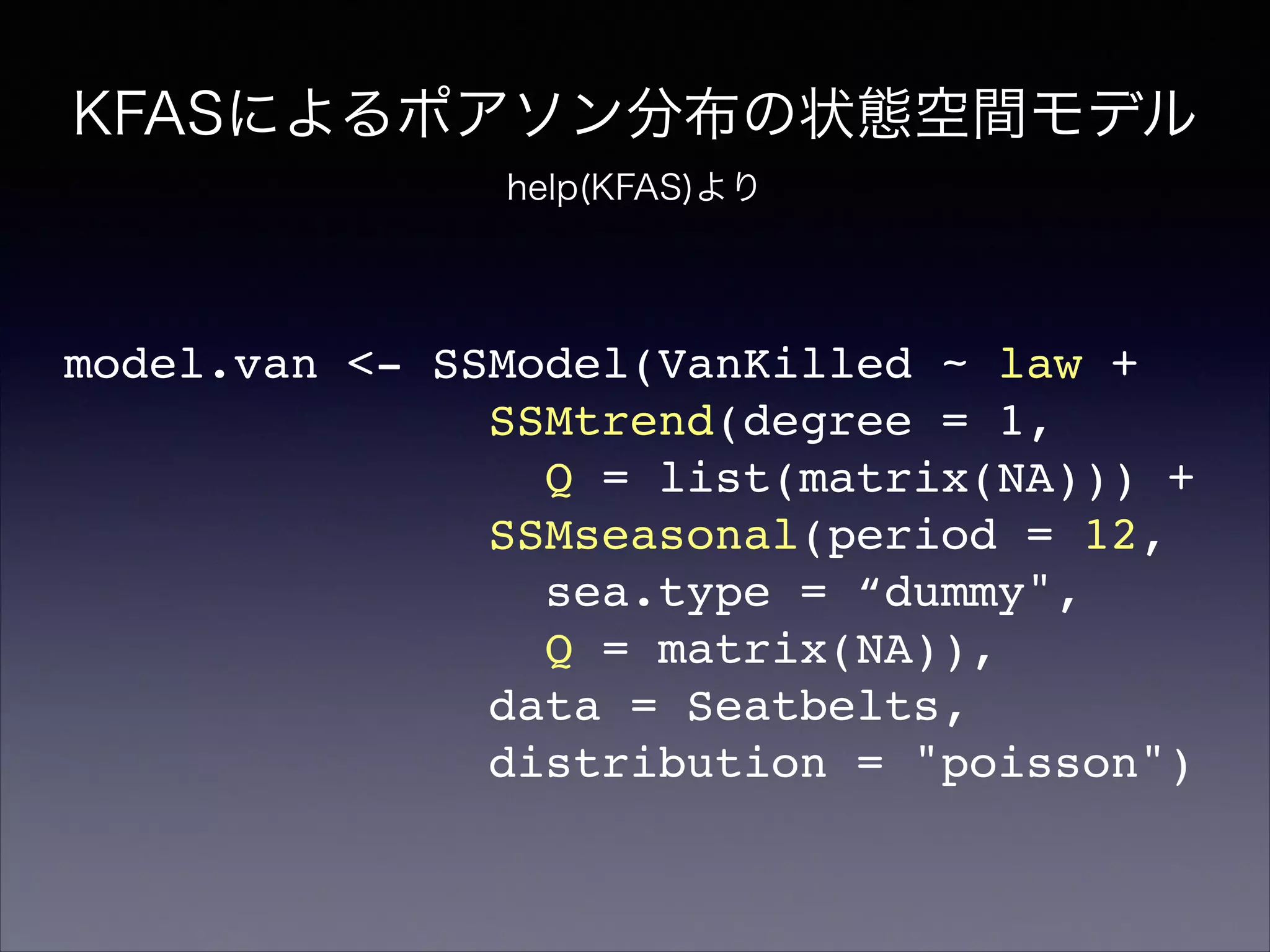
KFASによるポアソン分布の状態空間モデル help(KFAS)より model.van <- SSModel(VanKilled
~ law +! SSMtrend(degree = 1,! Q = list(matrix(NA))) +! SSMseasonal(period = 12,! sea.type = “dummy",! Q = matrix(NA)),! data = Seatbelts,! distribution = "poisson")
24.
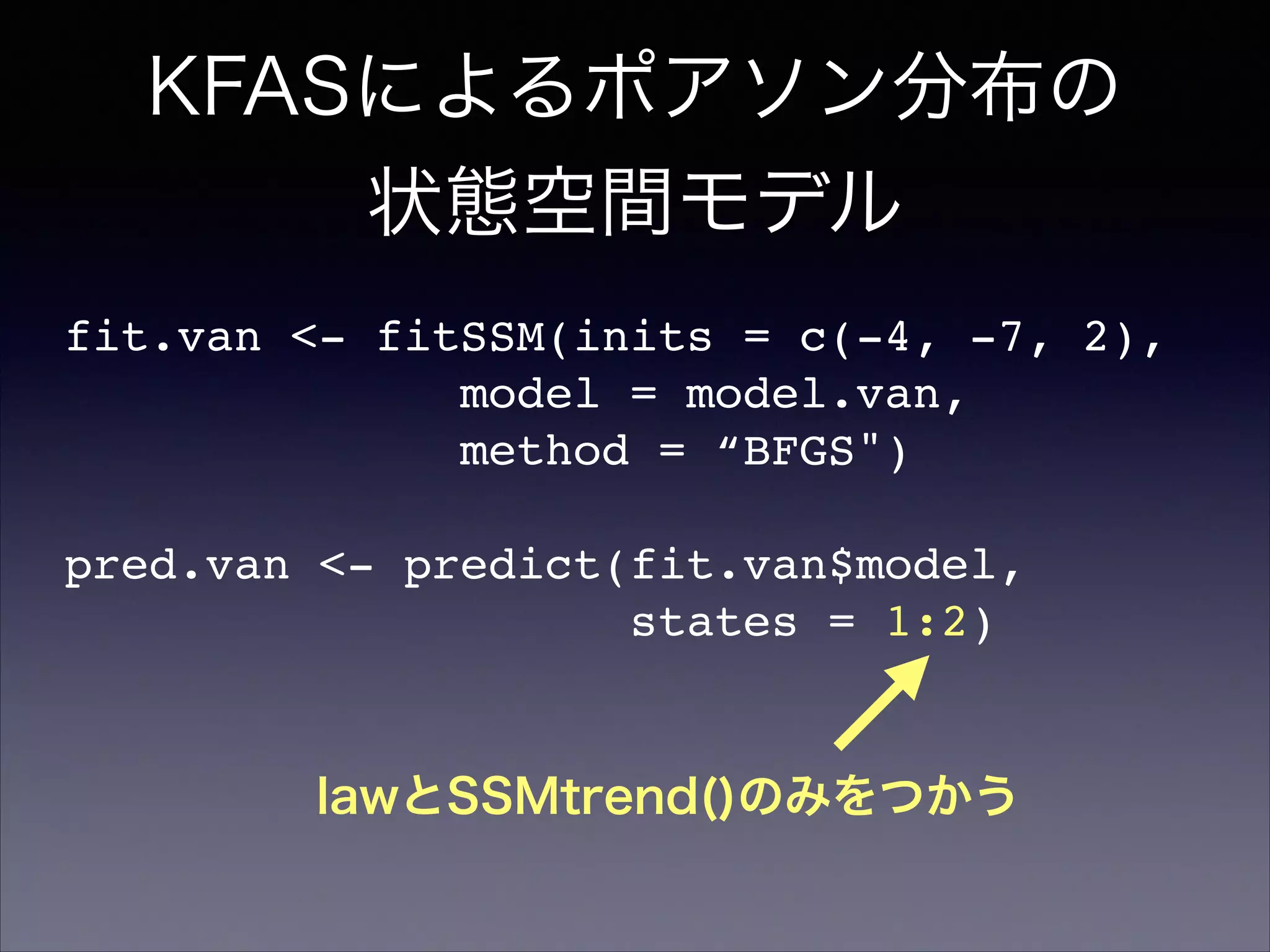
KFASによるポアソン分布の 状態空間モデル fit.van <- fitSSM(inits
= c(-4, -7, 2),! model = model.van,! method = “BFGS")! ! pred.van <- predict(fit.van$model,! states = 1:2) lawとSSMtrend()のみをつかう
25.
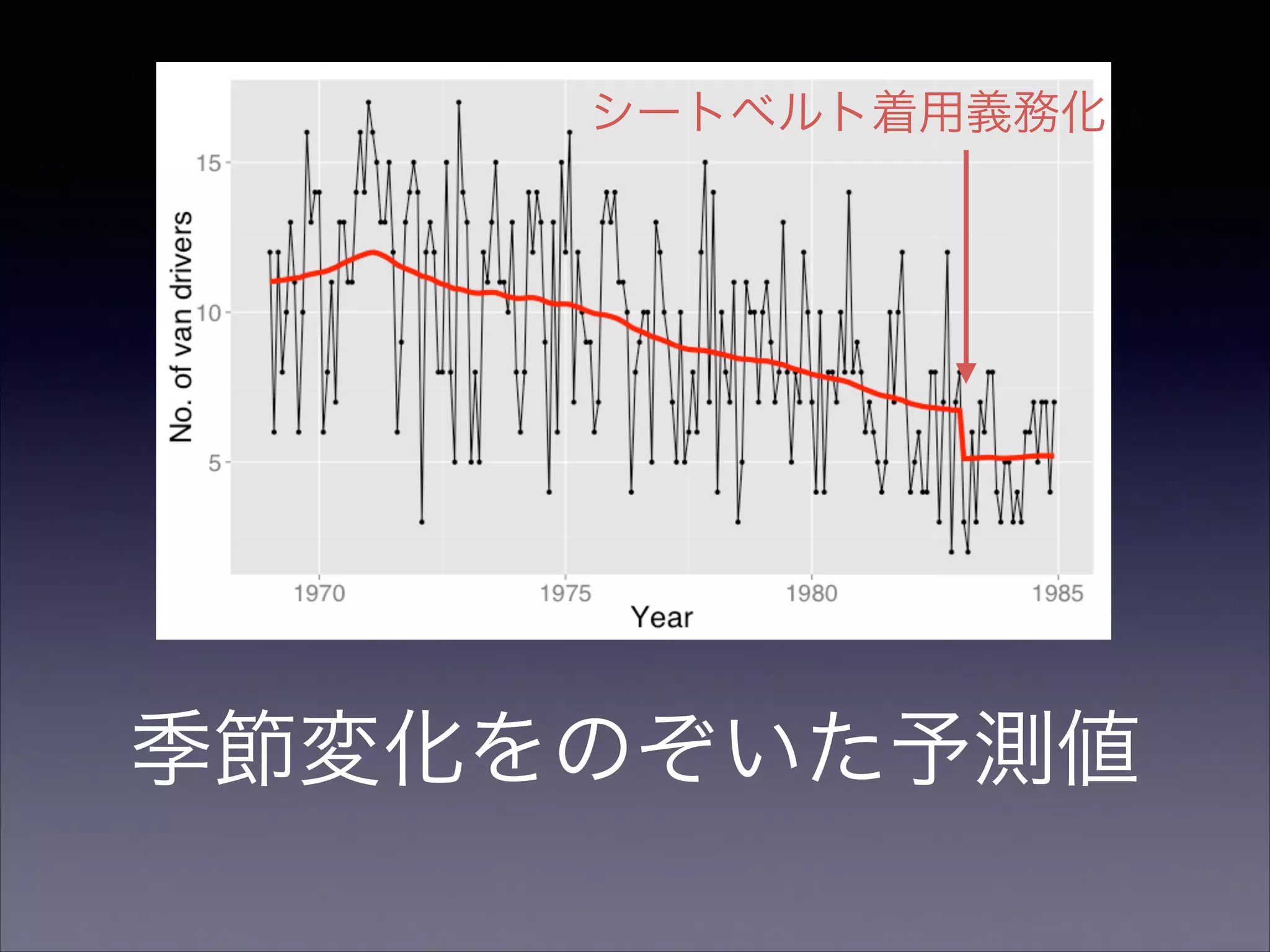
季節変化をのぞいた予測値 シートベルト着用義務化
26.
BUGS WinBUGS, OpenBUGS, JAGS
27.
BUGS • MCMCによるベイズ推定 • 柔軟なモデリング •
Rパッケージでは対応できないモデル
28.
例題 • ある生物の個体数を推定する。 • 一定の発見確率にしたがって発見される。 Kéry
& Schaub (2011) Bayesian Population Analysis using WinBUGS: A hierarchical perspective Chapter 5を参考にした。
29.
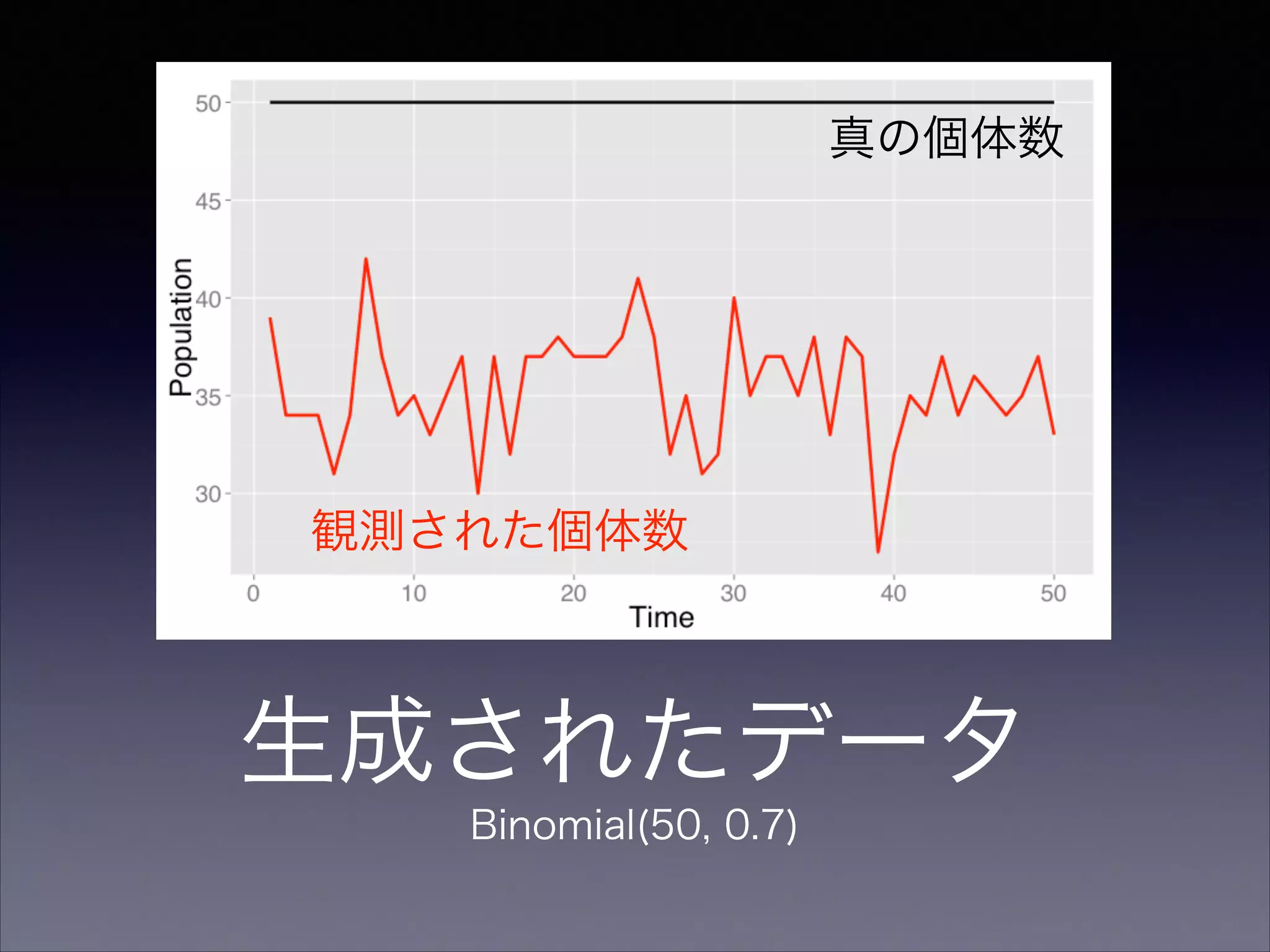
データ生成 set.seed(1234)! n.t <- 50
# 観察回数! N.lat <- rep(50, n.t) # 真の個体数! p <- 0.7 # 発見確率! N.obs <- rbinom(n.t, N.lat, p) # 観察個体数!
30.
生成されたデータ Binomial(50, 0.7) 真の個体数 観測された個体数
31.
BUGSモデル var! N, # 観察回数! y[N],
# 観察された個体数! y_hat[N], # 「真の個体数」の推定値! lambda[N], # log(y_hat)! p, # 発見確率! tau, sigma;
32.
BUGSモデル model {! ## データモデル! for
(t in 1:N) {! y[t] ~ dbin(p, y_hat[t]);! y_hat[t] <- trunc(exp(lambda[t]));! }! ## プロセスモデル! for (t in 2:N) {! lambda[t] ~ dnorm(lambda[t - 1], tau);! }! ## 事前分布! lambda[1] ~ dnorm(0, 1.0E-4);! p ~ dbeta(2, 2);! sigma ~ dunif(0, 100);! tau <- 1 / (sigma * sigma);! }
33.
JAGSによる実行 inits <- list()! inits[[1]]
<- list(p = 0.9, sigma = 1,! lambda = rep(log(max(N.obs) + 1), n.t))! inits[[2]] <- list(p = 0.7, sigma = 3,! lambda = rep(log(max(N.obs) + 1), n.t))! inits[[3]] <- list(p = 0.8, sigma = 5,! lambda = rep(log(max(N.obs) + 1), n.t))! ! model <- jags.model("ks51.bug.txt",! data = list(N = n.t, y = N.obs),! inits = inits, n.chains = 3,! n.adapt = 100000)! samp <- coda.samples(model,! variable.names = c("y_hat", “sigma",! "p"),! n.iter = 3000000, thin = 3000)!
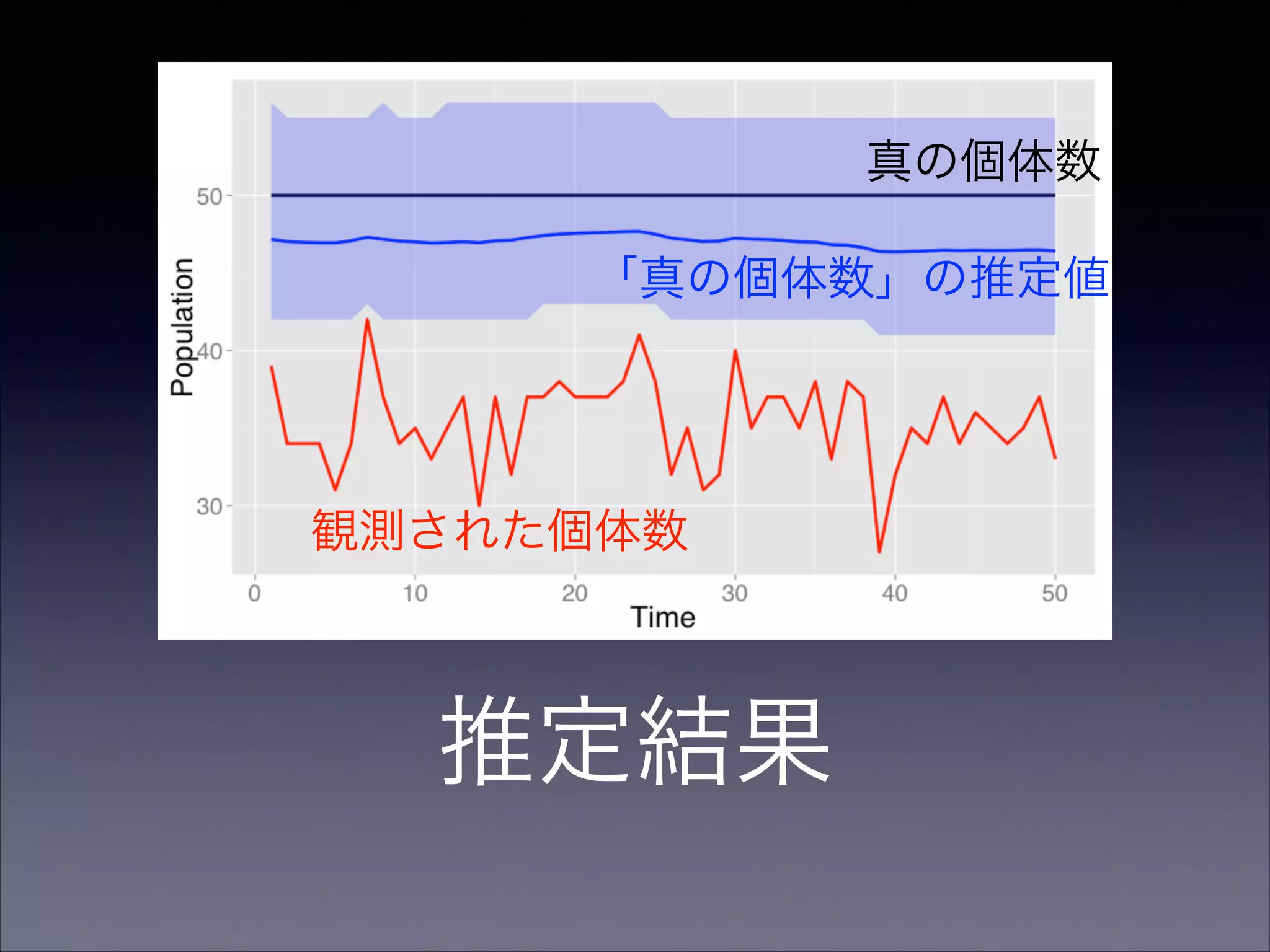
34.
推定結果 真の個体数 観測された個体数 「真の個体数」の推定値
35.
Stan
36.
http://mc-stan.org/
37.
Stan • MCMCによるベイズ推定 • Hamiltonian
Monte Carlo (HMC) • No U-Turn Sampling (NUTS) • Stan → C++ → ネイティブバイナリ
38.
Stan • CmdStan • コマンドラインから •
RStan • Rから • PyStan • Pythonから
39.
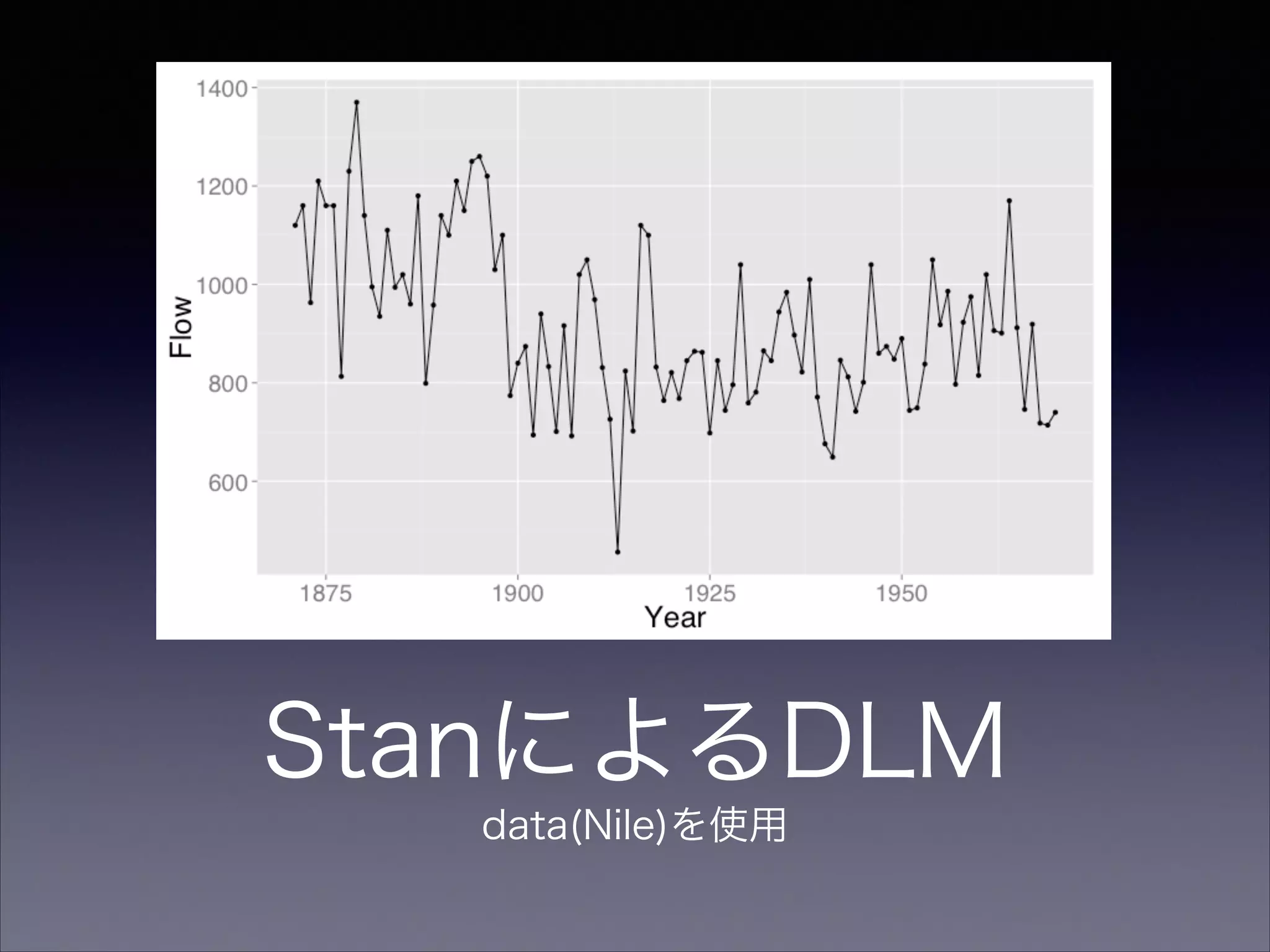
StanによるDLM data(Nile)を使用
40.
StanによるDLM data {! int<lower=0> N;! matrix[1,
N] y;! }! transformed data {! matrix[1, 1] F;! matrix[1, 1] G;! vector[1] m0;! cov_matrix[1] C0;! ! F[1, 1] <- 1;! G[1, 1] <- 1;! m0[1] <- 0;! C0[1, 1] <- 1.0e+6;! } データ dlmと同様の データを用意
41.
StanによるDLM parameters {! real<lower=0> sigma[2];! }! transformed
parameters {! vector[1] V;! cov_matrix[1] W;! ! V[1] <- sigma[1] * sigma[1];! W[1, 1] <- sigma[2] * sigma[2];! }! パラメータ dlmと同様の パラメータを 用意
42.
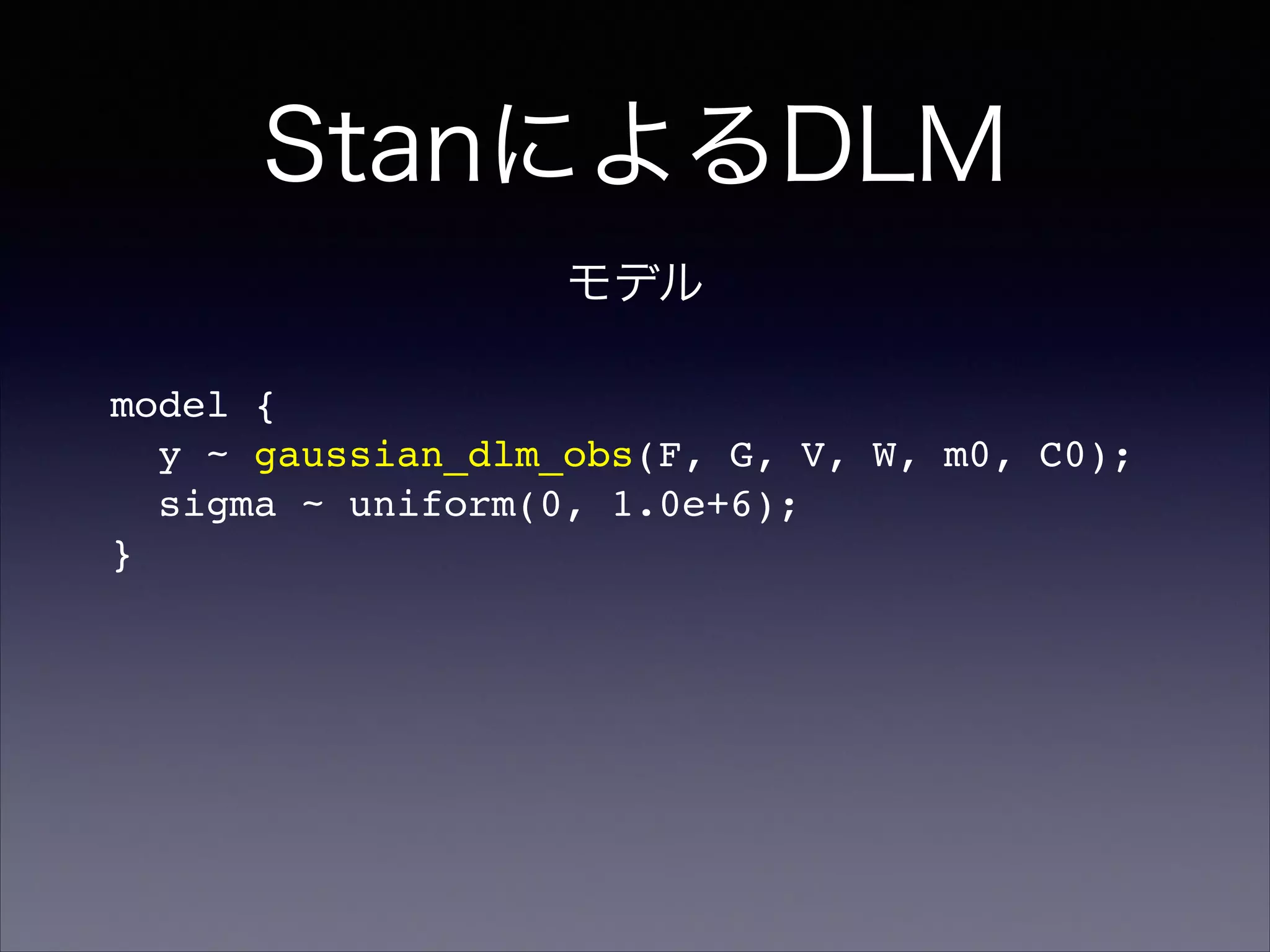
StanによるDLM model {! y ~
gaussian_dlm_obs(F, G, V, W, m0, C0);! sigma ~ uniform(0, 1.0e+6);! } モデル
43.
StanによるDLM library(rstan)! ! model <- stan("kalman.stan",! data
= list(y = matrix(c(Nile),! nrow = 1),! N = length(Nile)),! pars = c("sigma"),! chains = 3,! iter = 1500, warmup = 500,! thin = 1)
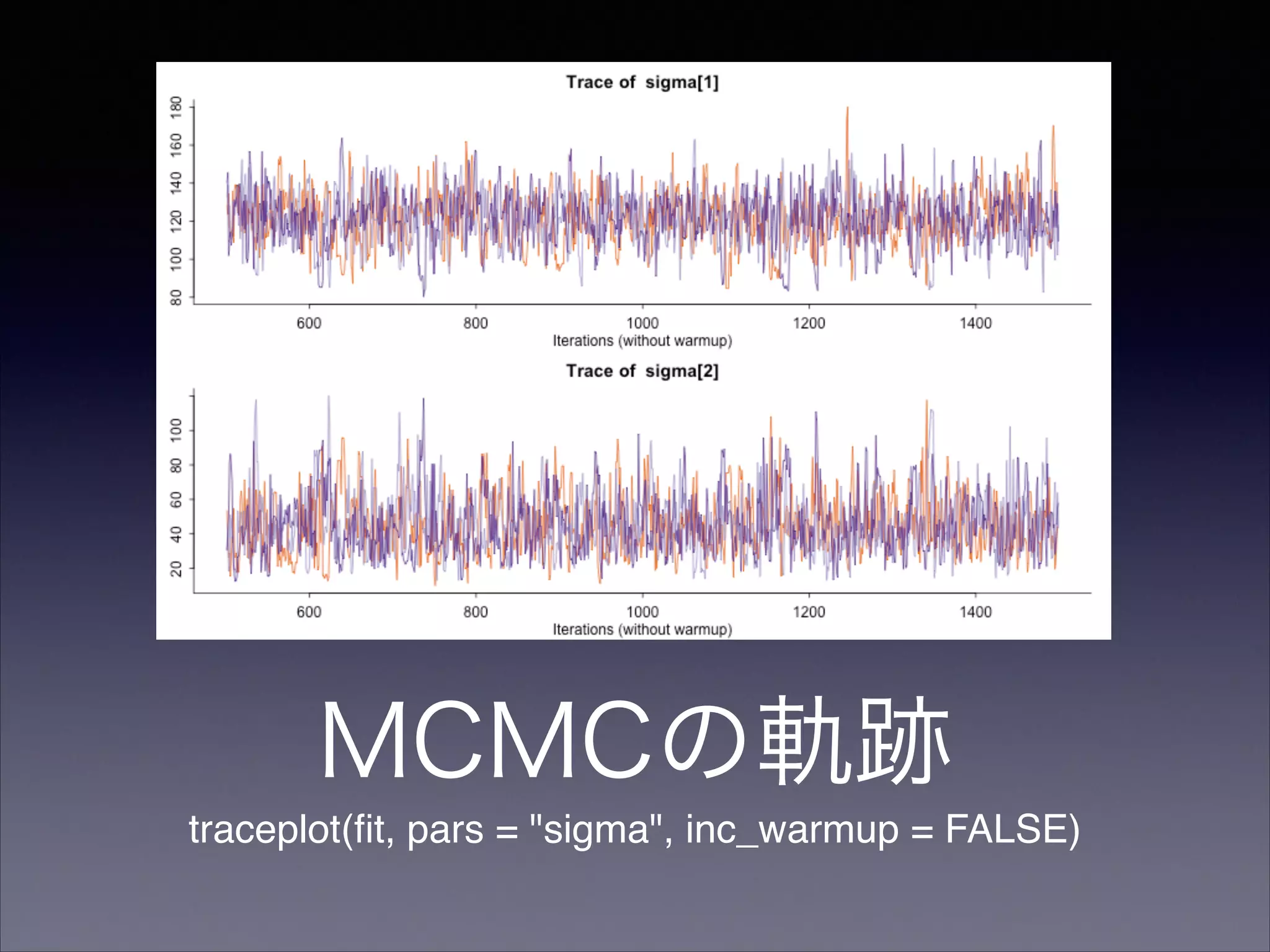
44.
MCMCの軌跡 traceplot(fit, pars =
"sigma", inc_warmup = FALSE)
45.
StanによるDLM > print(fit)! Inference for
Stan model: kalman.! 3 chains, each with iter=1500; warmup=500; thin=1; ! post-warmup draws per chain=1000, total post-warmup draws=3000.! ! mean se_mean sd 2.5% 25% 50% 75% 97.5% n_eff Rhat! sigma[1] 121.2 0.5 13.8 92.6 112.7 121.5 130.3 148.4 889 1! sigma[2] 45.5 0.6 17.6 18.3 32.7 43.2 55.7 85.2 833 1! lp__ -541.6 0.0 1.1 -544.6 -542.0 -541.3 -540.9 -540.6 904 1! ! Samples were drawn using NUTS(diag_e) at Sun Feb 9 06:06:42 2014.! For each parameter, n_eff is a crude measure of effective sample size,! and Rhat is the potential scale reduction factor on split chains (at ! convergence, Rhat=1).!
46.
StanによるDLM sigma <- apply(extract(fit,
"sigma")$sigma, 2, mean)! ! library(dlm)! ! buildNile <- function(theta) {! dlmModPoly(order = 1, dV = theta[1], dW = theta[2])! }! modNile <- buildNile(sigma^2)! smoothNile <- dlmSmooth(Nile, modNile) ベイズ推定されたパラメータをdlmで使用
47.
平滑化 Stanでベイズ推定されたパラメータをdlmで使用
48.
Stanによる状態空間モデルの解析 • gaussian_dlm_obs()でうまくいかないことも • 自分でモデルを記述することも当然可能
49.
Stanによる状態空間モデルの解析 data {! int<lower=0> N;! real
y[N];! }! parameters {! real theta[N];! real<lower=0> sigma[2];! }!
50.
Stanによる状態空間モデルの解析 model {! // データモデル! for
(t in 1:N) {! y[t] ~ normal(theta[t], sigma[1]);! }! ! // プロセスモデル! for (t in 2:N) {! theta[t] ~ normal(theta[t - 1], sigma[2]);! }! ! // 事前分布! theta[1] ~ normal(0, 1.0e+4);! sigma ~ uniform(0, 1.0e+6);! }
51.
まとめ 状態空間モデルをあつかえるソフトウェア • Rパッケージ: dlm,
KFAS • 関数に与える引数の意味を理解する。 • ベイズ推定: BUGS, Stan • 柔軟なモデリングが可能。 • 計算時間はかかる。 • 上記以外のソフトウェアもある。
Download

![dlmによるLocal Level Model
Petris and Petrone (2011)より
## build functionの定義!
BuildLLM <- function(theta) {!
dlmModPoly(order = 1,!
dV = theta[1],!
dW = theta[2])!
}
このような関数を定義しておく。](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-10-2048.jpg)

![dlmによる回帰モデル
## モデル定義!
model.reg <- dlmModReg(x, dW = c(1, 0))!
BuildReg <- function(theta) {!
V(model.reg) <- exp(theta[1])!
diag(W(model.reg))[1] <- exp(theta[2])!
return(model.reg)!
}](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-15-2048.jpg)


![BUGSモデル
var!
N, # 観察回数!
y[N], # 観察された個体数!
y_hat[N], # 「真の個体数」の推定値!
lambda[N], # log(y_hat)!
p, # 発見確率!
tau, sigma;](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-31-2048.jpg)
![BUGSモデル
model {!
## データモデル!
for (t in 1:N) {!
y[t] ~ dbin(p, y_hat[t]);!
y_hat[t] <- trunc(exp(lambda[t]));!
}!
## プロセスモデル!
for (t in 2:N) {!
lambda[t] ~ dnorm(lambda[t - 1], tau);!
}!
## 事前分布!
lambda[1] ~ dnorm(0, 1.0E-4);!
p ~ dbeta(2, 2);!
sigma ~ dunif(0, 100);!
tau <- 1 / (sigma * sigma);!
}](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-32-2048.jpg)
![JAGSによる実行
inits <- list()!
inits[[1]] <- list(p = 0.9, sigma = 1,!
lambda = rep(log(max(N.obs) + 1), n.t))!
inits[[2]] <- list(p = 0.7, sigma = 3,!
lambda = rep(log(max(N.obs) + 1), n.t))!
inits[[3]] <- list(p = 0.8, sigma = 5,!
lambda = rep(log(max(N.obs) + 1), n.t))!
!
model <- jags.model("ks51.bug.txt",!
data = list(N = n.t, y = N.obs),!
inits = inits, n.chains = 3,!
n.adapt = 100000)!
samp <- coda.samples(model,!
variable.names = c("y_hat", “sigma",!
"p"),!
n.iter = 3000000, thin = 3000)!](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-33-2048.jpg)
![StanによるDLM
data {!
int<lower=0> N;!
matrix[1, N] y;!
}!
transformed data {!
matrix[1, 1] F;!
matrix[1, 1] G;!
vector[1] m0;!
cov_matrix[1] C0;!
!
F[1, 1] <- 1;!
G[1, 1] <- 1;!
m0[1] <- 0;!
C0[1, 1] <- 1.0e+6;!
}
データ
dlmと同様の
データを用意](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-40-2048.jpg)
![StanによるDLM
parameters {!
real<lower=0> sigma[2];!
}!
transformed parameters {!
vector[1] V;!
cov_matrix[1] W;!
!
V[1] <- sigma[1] * sigma[1];!
W[1, 1] <- sigma[2] * sigma[2];!
}!
パラメータ
dlmと同様の
パラメータを
用意](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-41-2048.jpg)
![StanによるDLM
> print(fit)!
Inference for Stan model: kalman.!
3 chains, each with iter=1500; warmup=500; thin=1; !
post-warmup draws per chain=1000, total post-warmup draws=3000.!
!
mean se_mean sd 2.5% 25% 50% 75% 97.5% n_eff Rhat!
sigma[1] 121.2 0.5 13.8 92.6 112.7 121.5 130.3 148.4 889 1!
sigma[2] 45.5 0.6 17.6 18.3 32.7 43.2 55.7 85.2 833 1!
lp__ -541.6 0.0 1.1 -544.6 -542.0 -541.3 -540.9 -540.6 904 1!
!
Samples were drawn using NUTS(diag_e) at Sun Feb 9 06:06:42 2014.!
For each parameter, n_eff is a crude measure of effective sample size,!
and Rhat is the potential scale reduction factor on split chains (at !
convergence, Rhat=1).!](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-45-2048.jpg)
![StanによるDLM
sigma <- apply(extract(fit, "sigma")$sigma, 2, mean)!
!
library(dlm)!
!
buildNile <- function(theta) {!
dlmModPoly(order = 1, dV = theta[1], dW = theta[2])!
}!
modNile <- buildNile(sigma^2)!
smoothNile <- dlmSmooth(Nile, modNile)
ベイズ推定されたパラメータをdlmで使用](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-46-2048.jpg)

![Stanによる状態空間モデルの解析
data {!
int<lower=0> N;!
real y[N];!
}!
parameters {!
real theta[N];!
real<lower=0> sigma[2];!
}!](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-49-2048.jpg)
![Stanによる状態空間モデルの解析
model {!
// データモデル!
for (t in 1:N) {!
y[t] ~ normal(theta[t], sigma[1]);!
}!
!
// プロセスモデル!
for (t in 2:N) {!
theta[t] ~ normal(theta[t - 1], sigma[2]);!
}!
!
// 事前分布!
theta[1] ~ normal(0, 1.0e+4);!
sigma ~ uniform(0, 1.0e+6);!
}](https://image.slidesharecdn.com/2014esj-140318154914-phpapp02/75/slide-50-2048.jpg)

![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent](https://cdn.slidesharecdn.com/ss_thumbnails/20171106dl2-171108033614-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...](https://cdn.slidesharecdn.com/ss_thumbnails/20181214clebschgordanmizuta-181214051939-thumbnail.jpg?width=640&height=640&fit=bounds)



















































