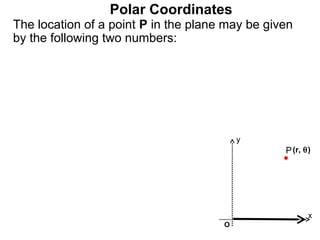
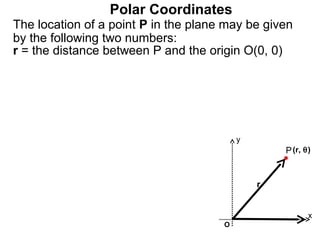
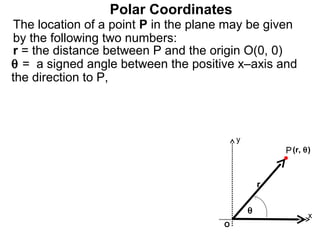
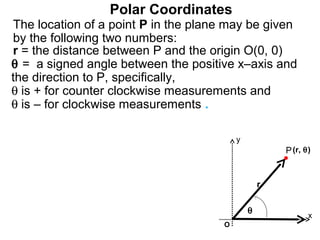
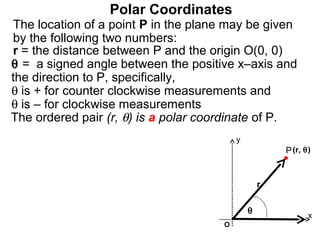
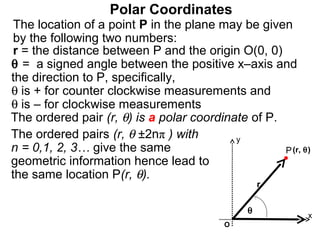
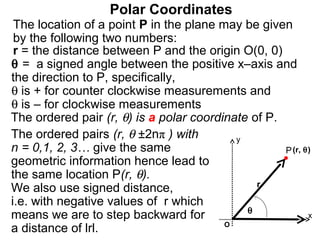
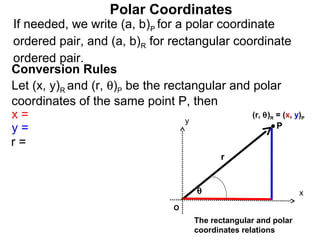
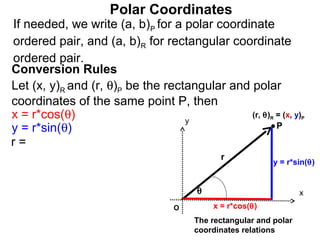
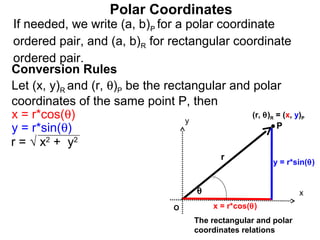
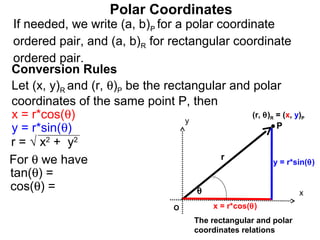
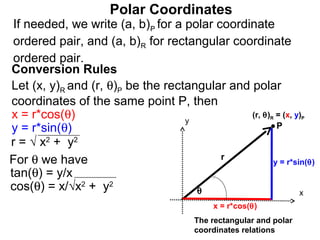
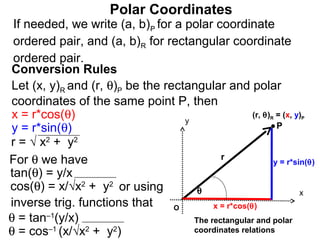
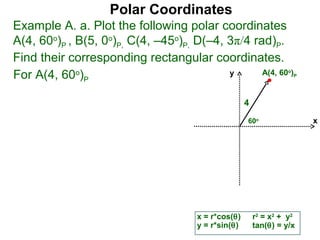
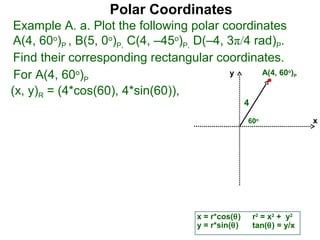
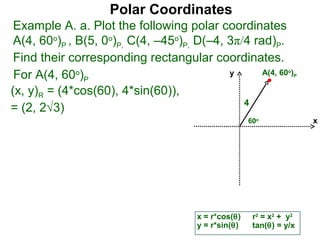
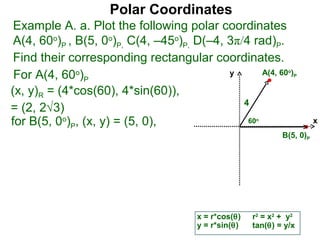
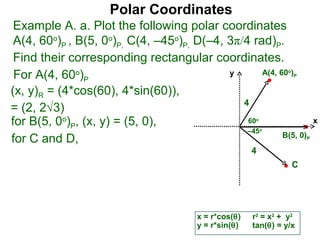
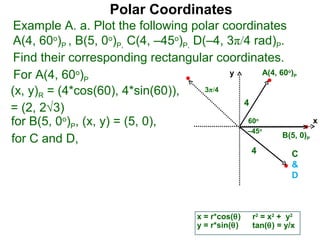
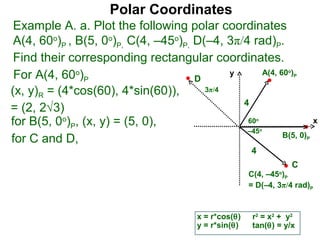
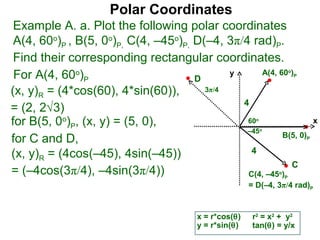
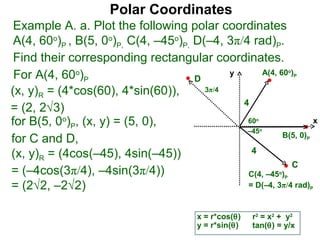
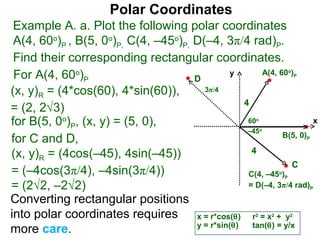
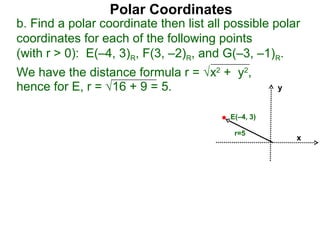
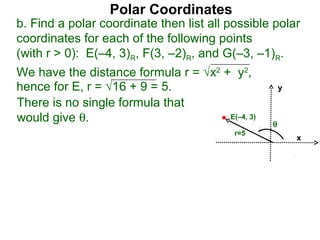
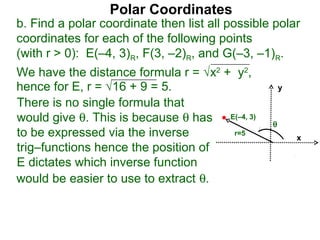
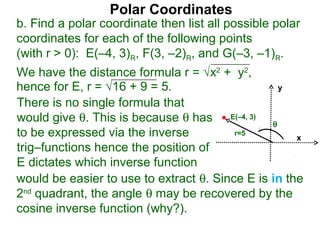
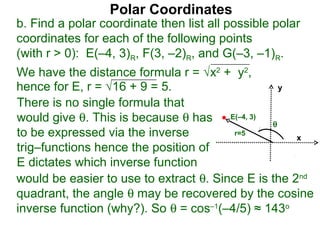
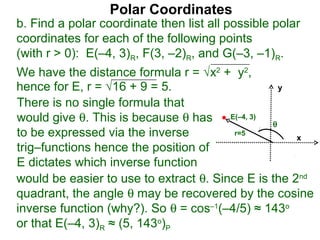
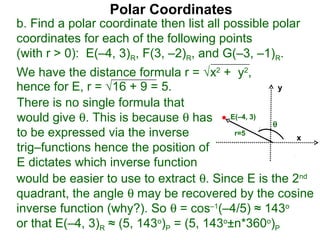
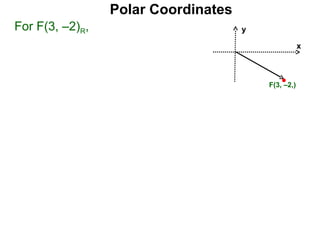
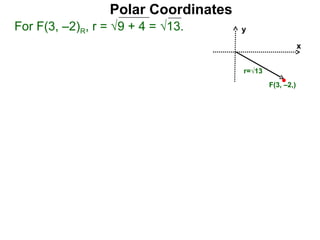
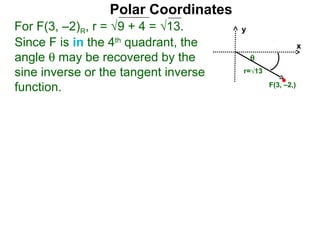
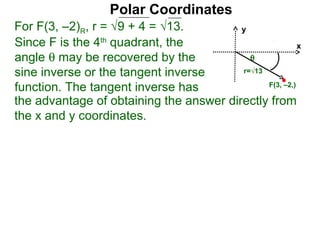
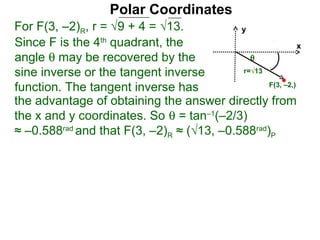
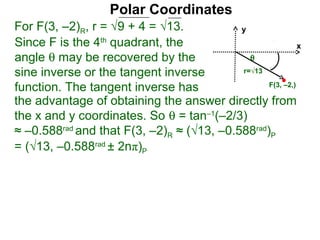
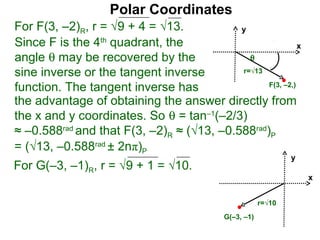
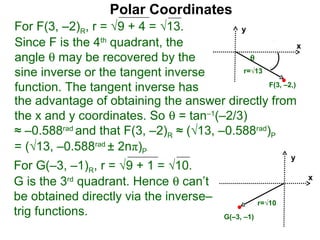
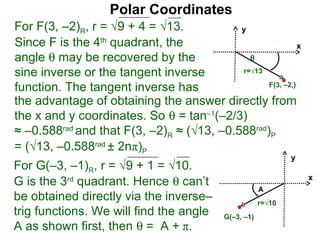
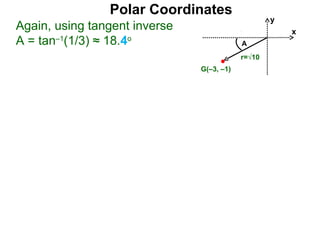
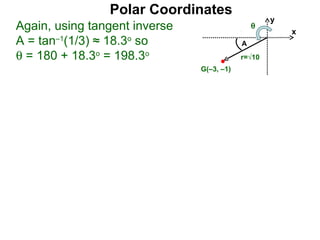
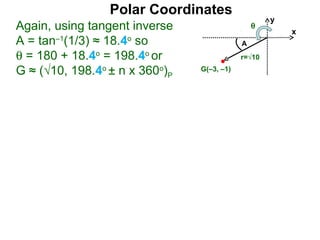
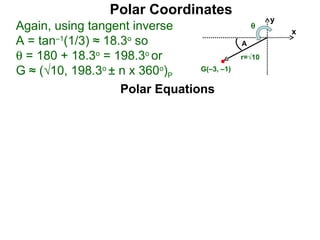
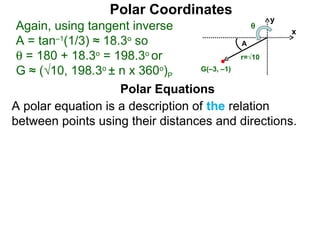
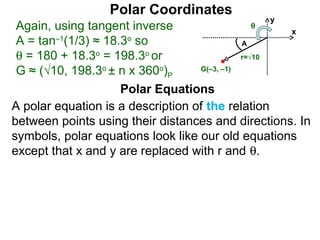
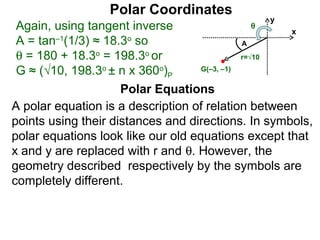
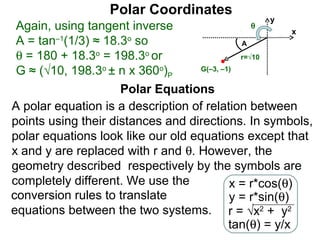
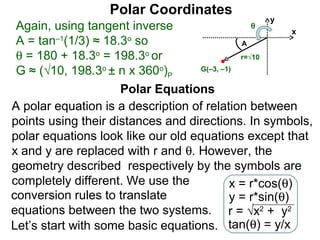
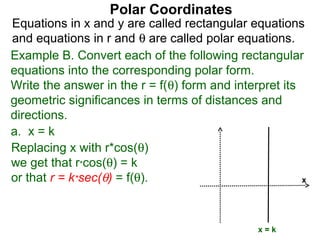
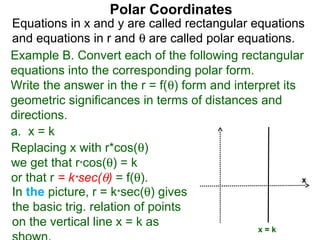
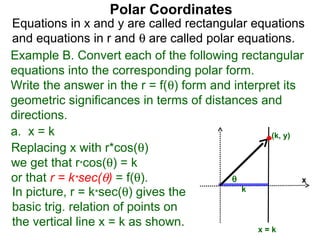
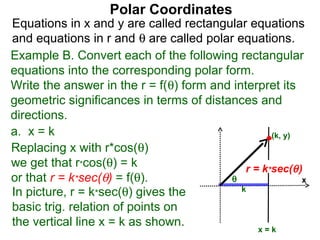
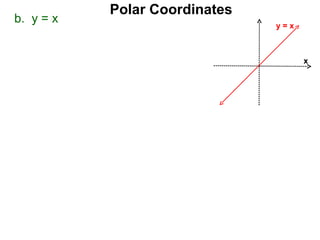
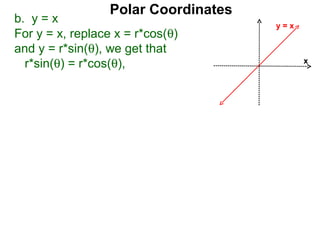
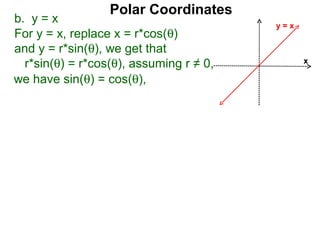
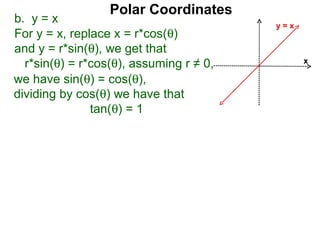
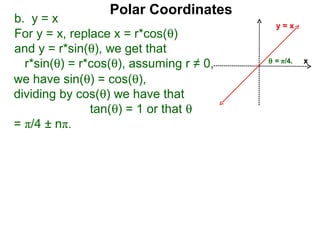
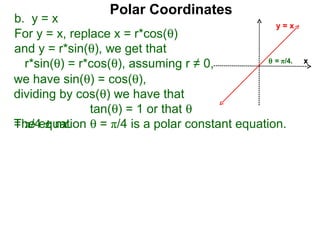
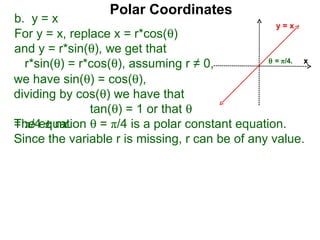
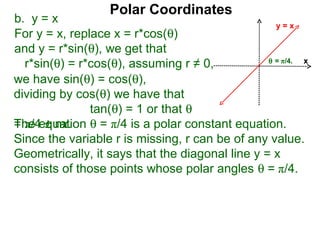
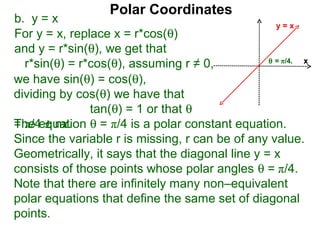
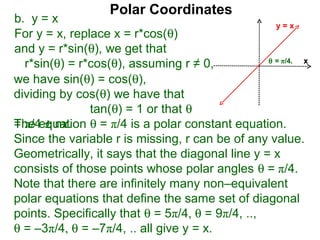
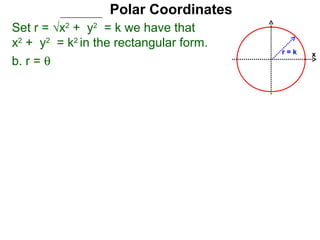
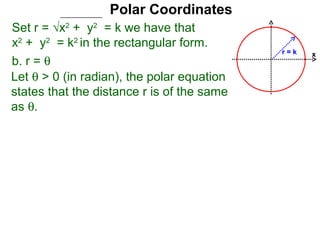
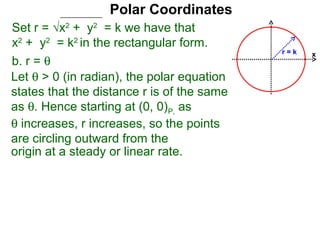
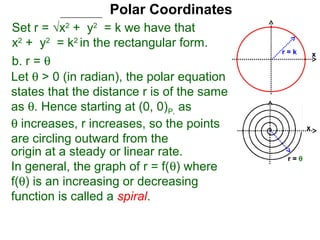
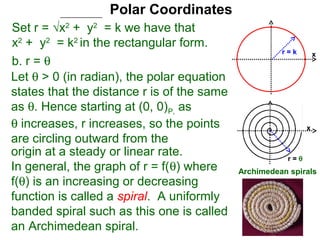
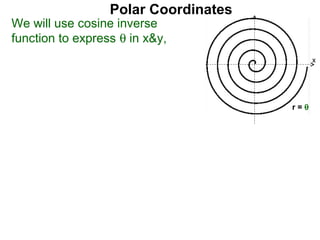
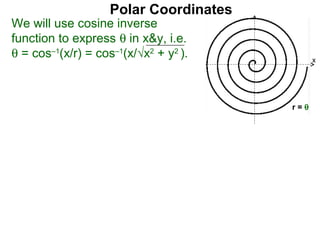
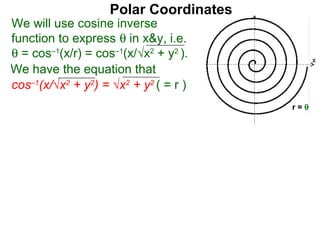
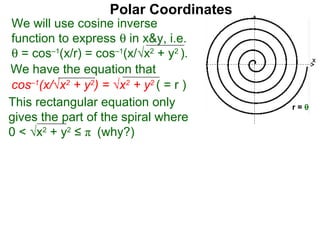
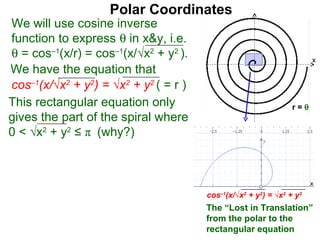
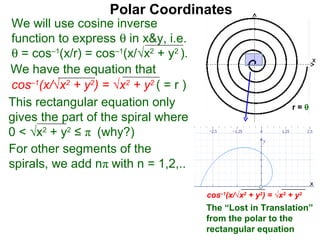
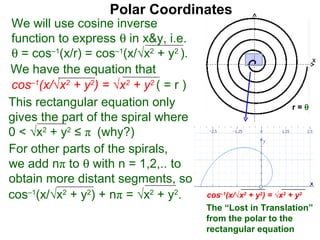
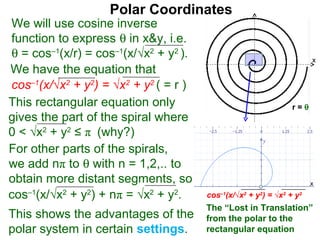
The document describes polar coordinates, which represent the location of a point P in a plane using two numbers: r, the distance from P to the origin O, and θ, the angle between the positive x-axis and the line from O to P. θ is positive for counter-clockwise angles and negative for clockwise angles. The polar coordinate (r, θ) uniquely identifies P's location. The document also provides the conversion formulas between polar coordinates (r, θ) and rectangular coordinates (x, y).