Downloaded 77 times





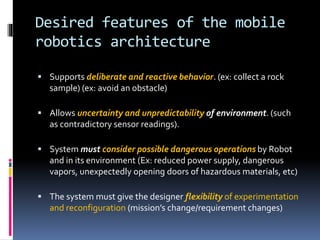






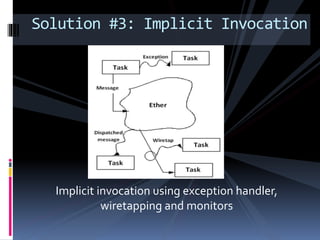




The document discusses various architectures for mobile robotics systems. It describes four solutions: 1) A control loop that initiates actions and monitors consequences to adjust plans. 2) A layered architecture with control routines, sensor analysis, world modeling, navigation, and planning layers. 3) An implicit invocation task control architecture using exceptions, wiretapping, and monitors. 4) A blackboard architecture with components interacting via a shared repository to resolve uncertainties.











































![Blue_Futuristic_Technology_Presentation_(3)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/bluefuturistictechnologypresentation31-250520171656-4912de65-thumbnail.jpg?width=640&height=640&fit=bounds)





















