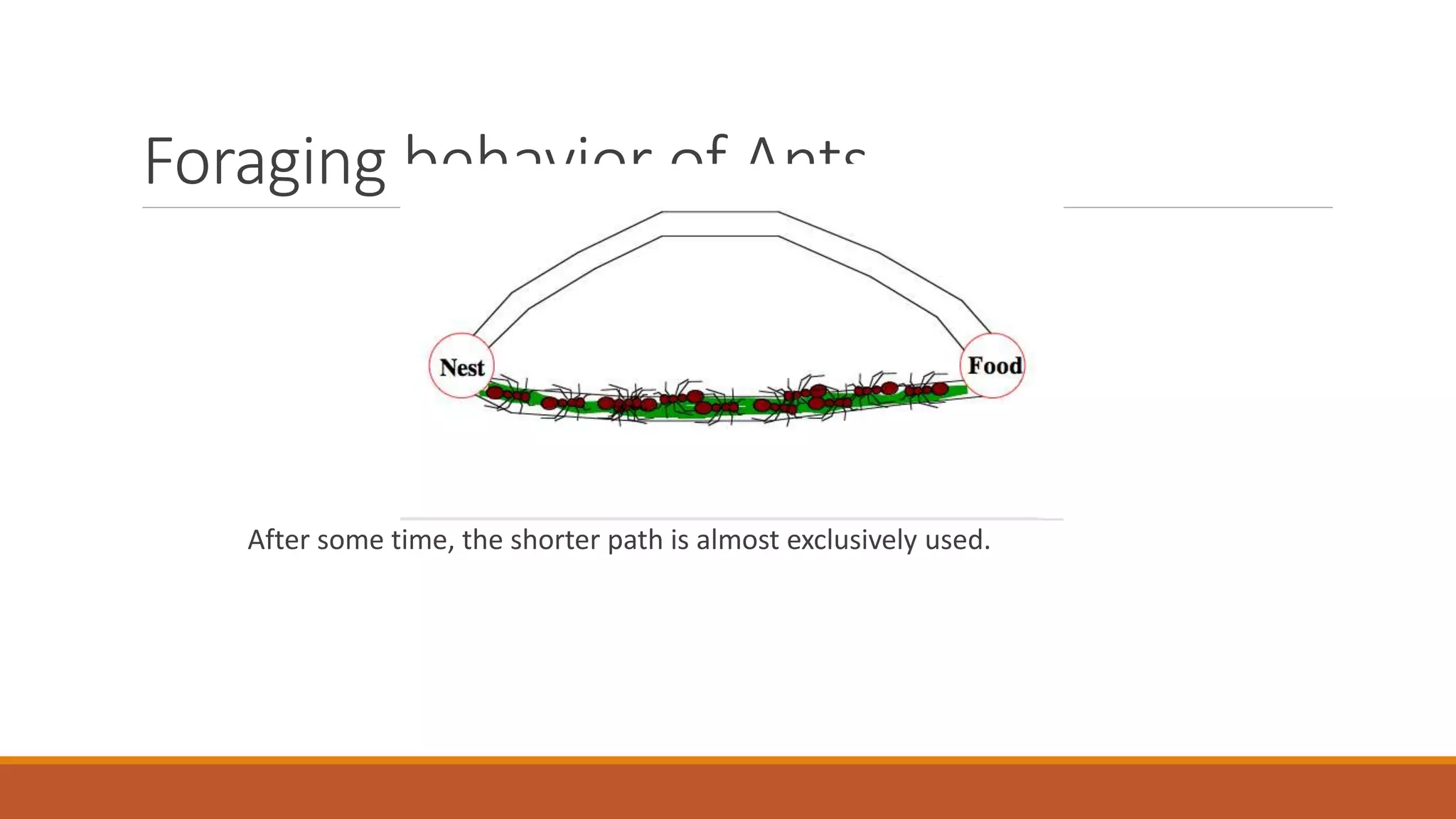
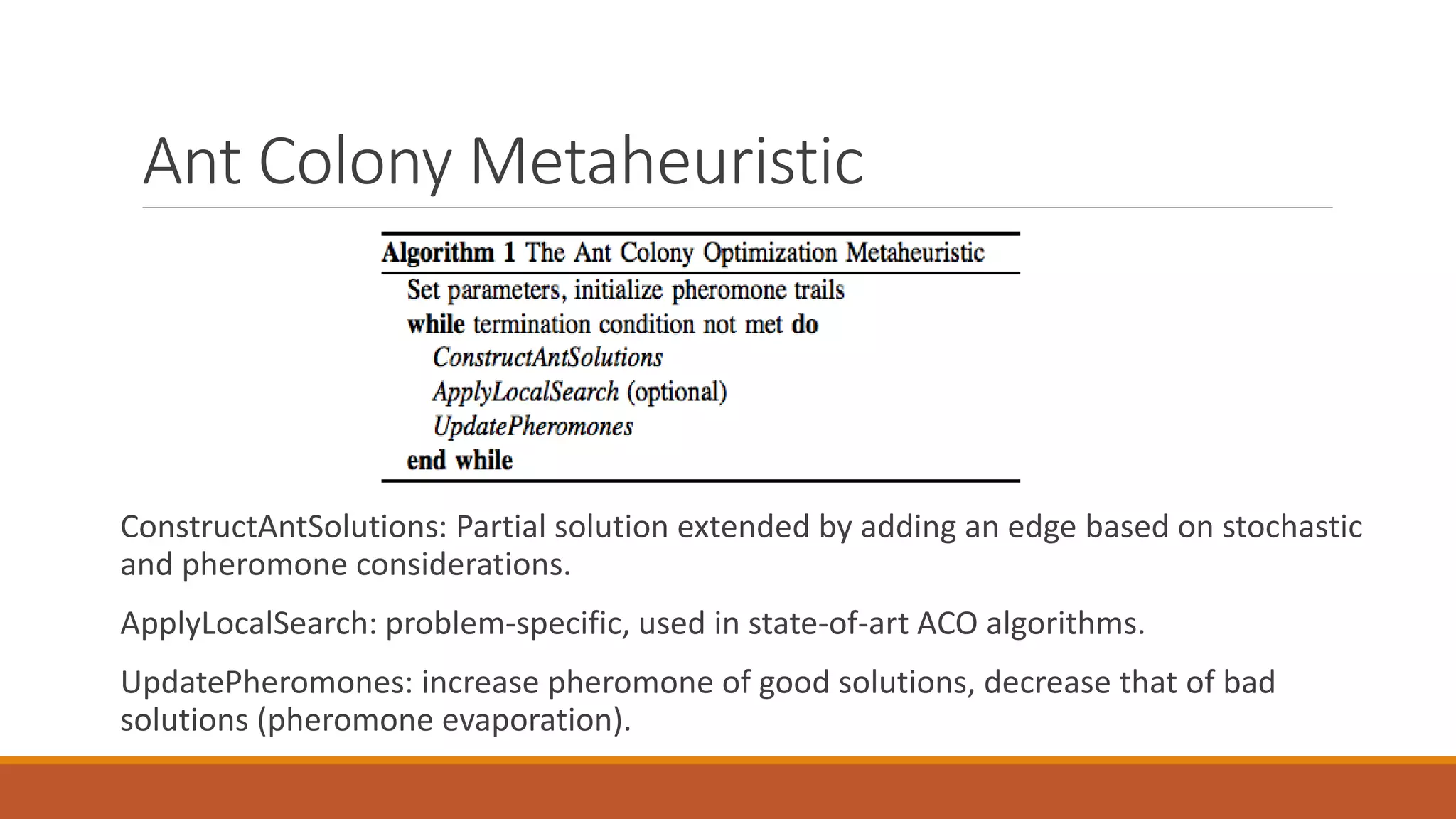
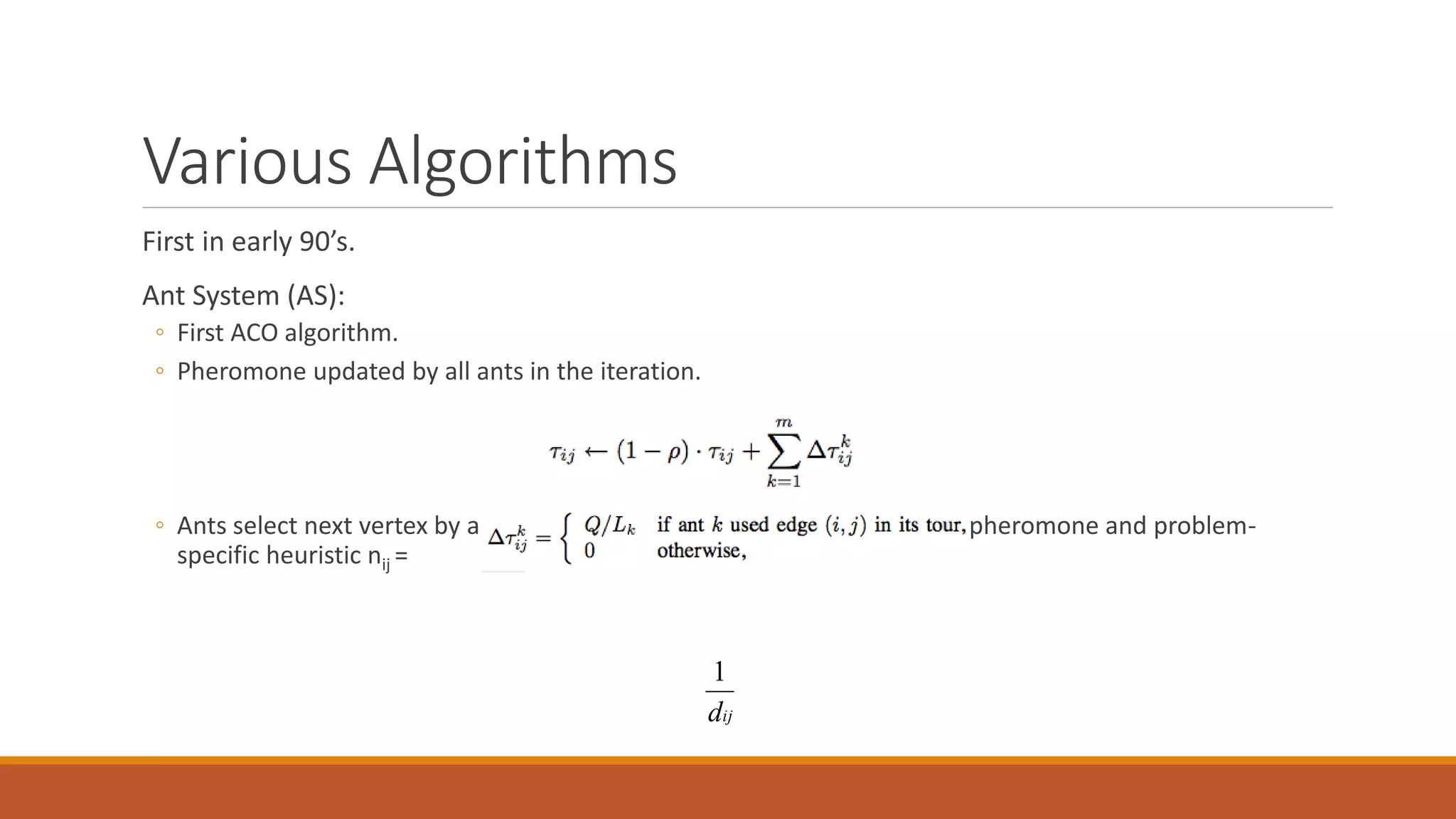
Swarm intelligence is a biologically inspired field that studies how social behaviors emerge from the interactions between individuals in a decentralized system. It draws inspiration from natural systems like bird flocking and ant colonies. Particle swarm optimization and ant colony optimization are two popular swarm intelligence algorithms. PSO mimics bird flocking by having particles update their velocities based on their own experience and the swarm's experience. ACO mimics ant foraging behavior by having artificial ants deposit and follow pheromone trails to iteratively find optimal solutions. Both algorithms have been applied to problems like optimization and routing.

![Swarm Intelligence - Definition
“any attempt to design algorithms or distributed problem-solving devices inspired by the
collective behavior of social insect colonies and other animal societies”
[Bonabeau, Dorigo, Theraulaz: Swarm Intelligence]
Solves optimization problems](https://image.slidesharecdn.com/bio-inspiredcomputingalgorithms-230312102603-3d68213a/75/Bio-inspired-computing-Algorithms-pptx-16-2048.jpg)