Download as PDF, PPTX

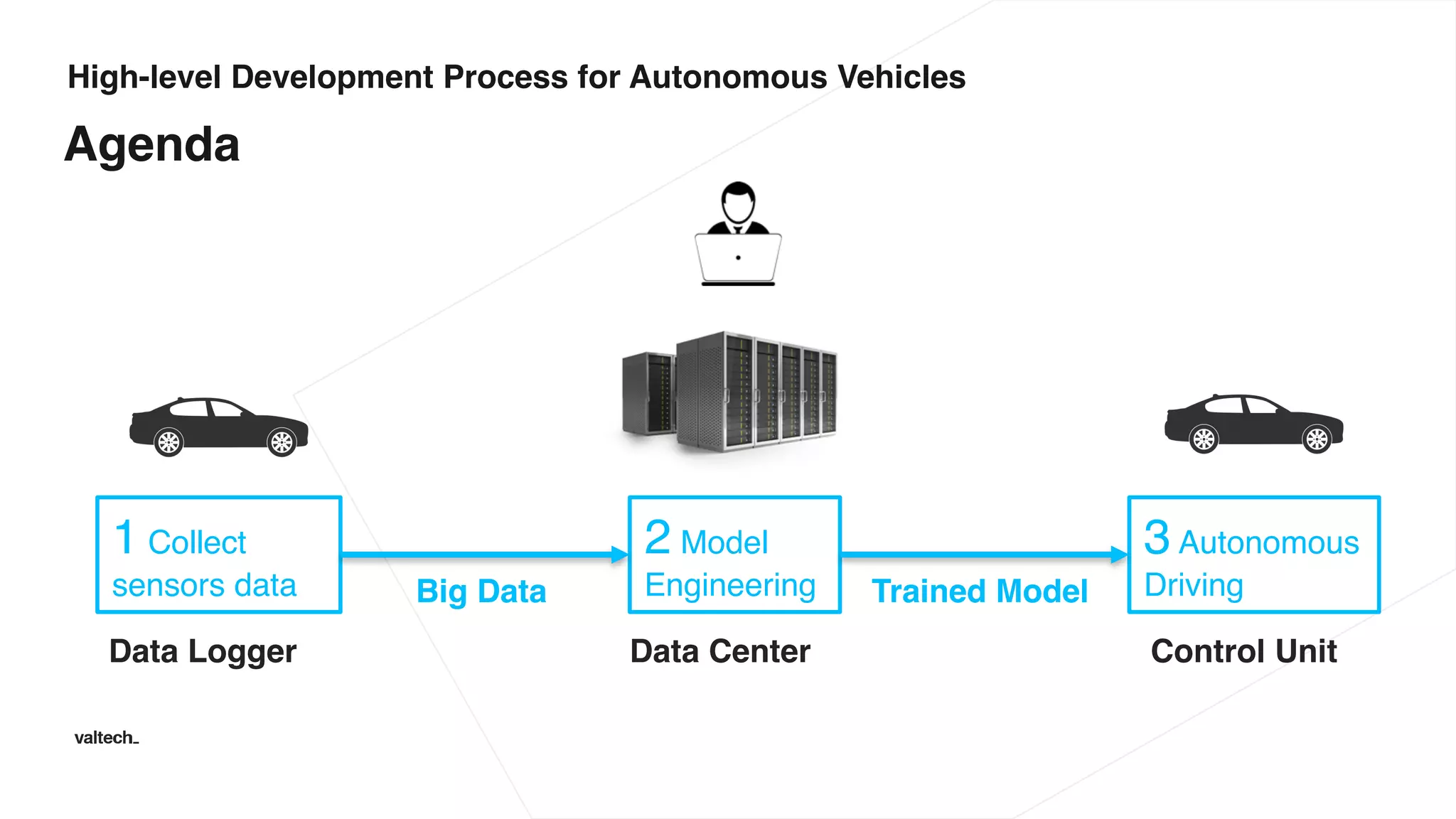
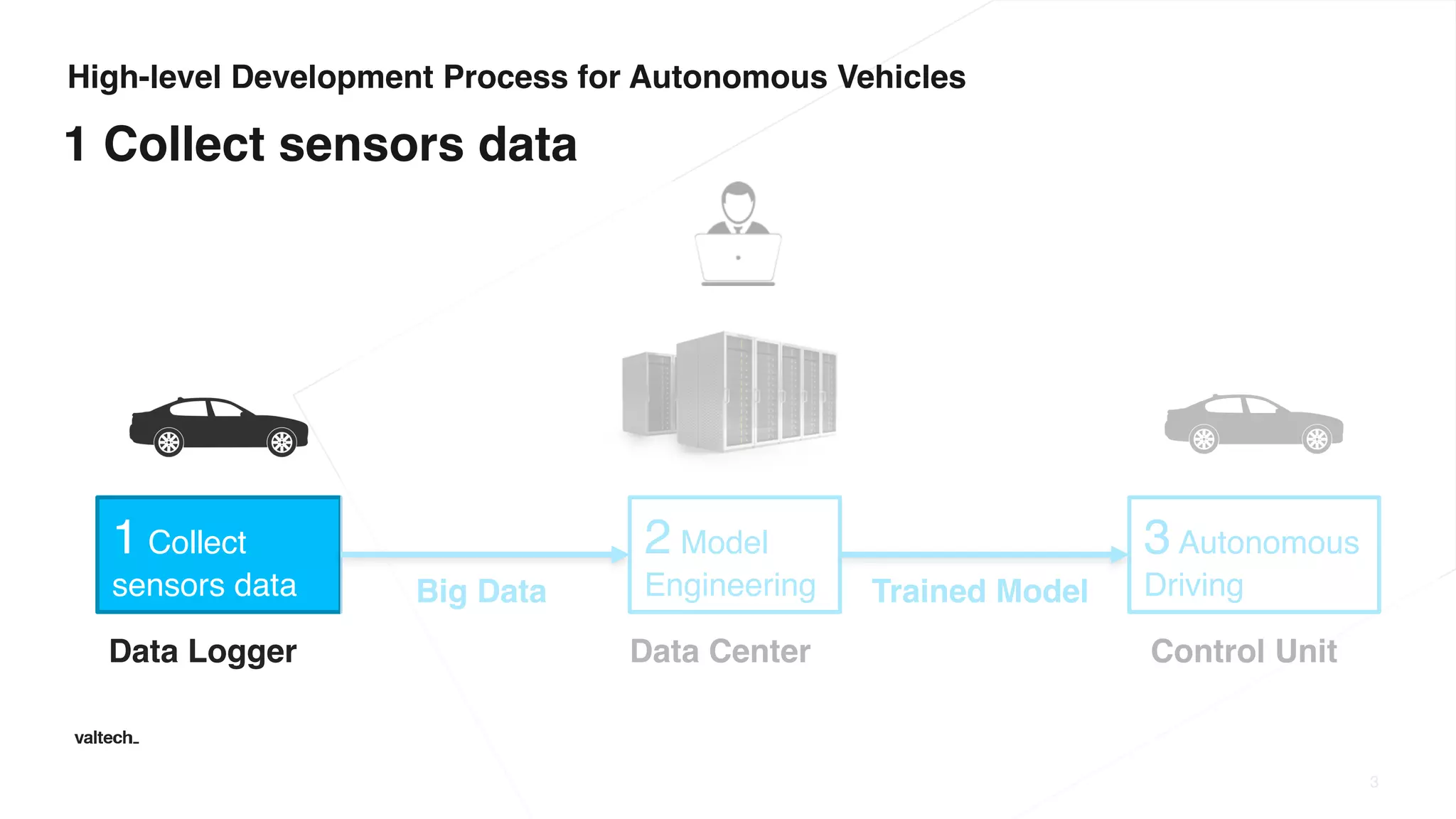

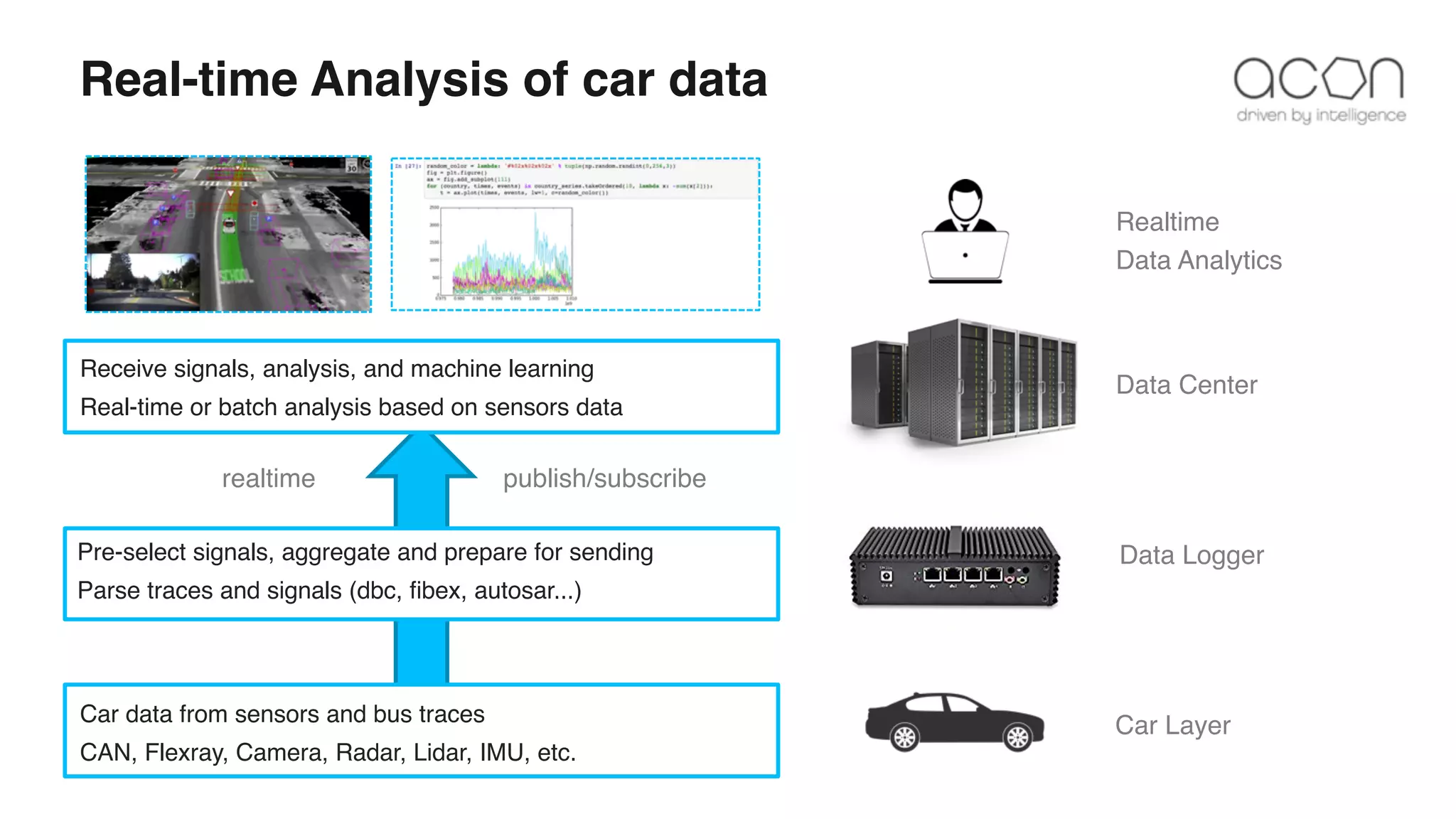
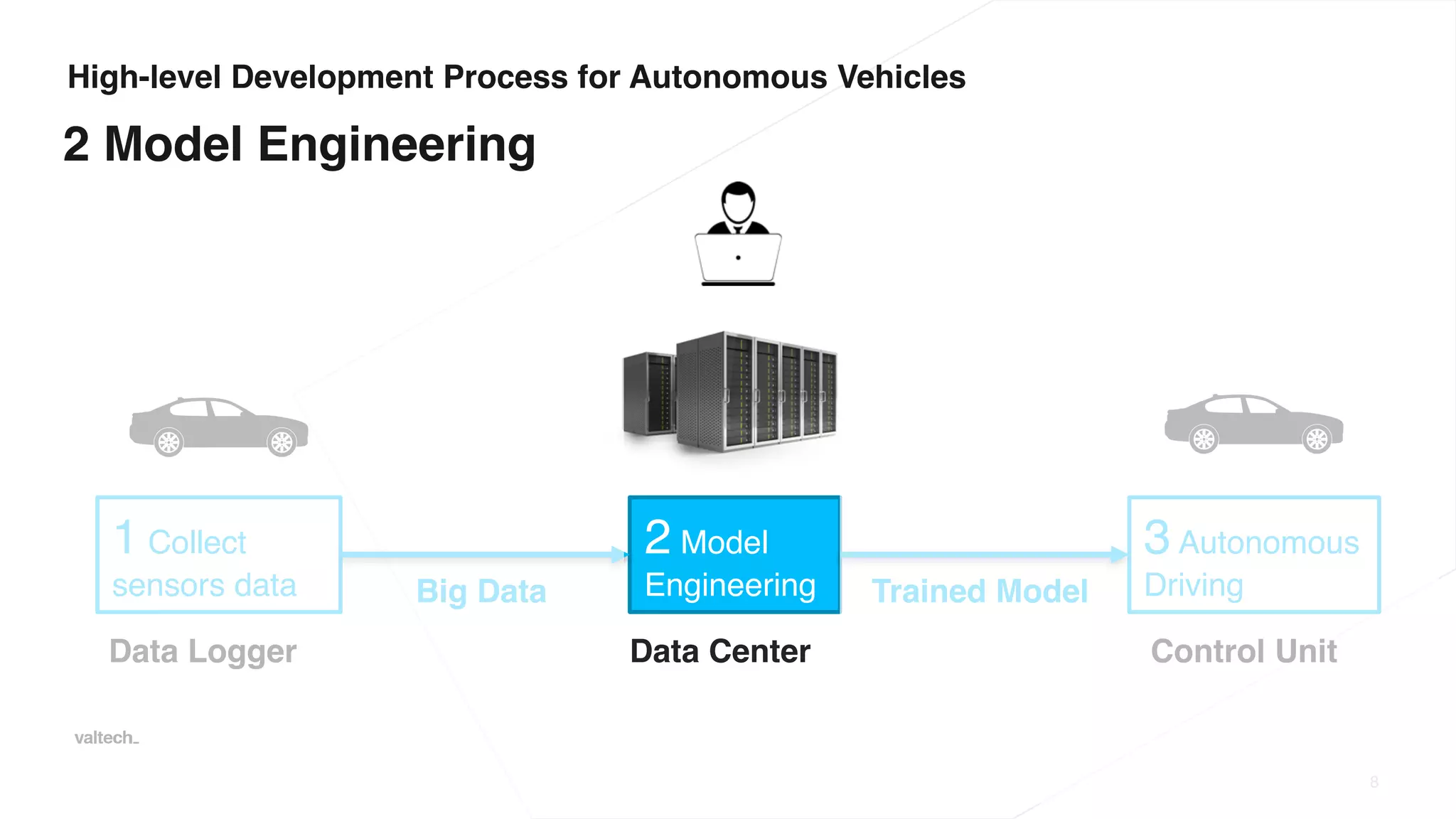
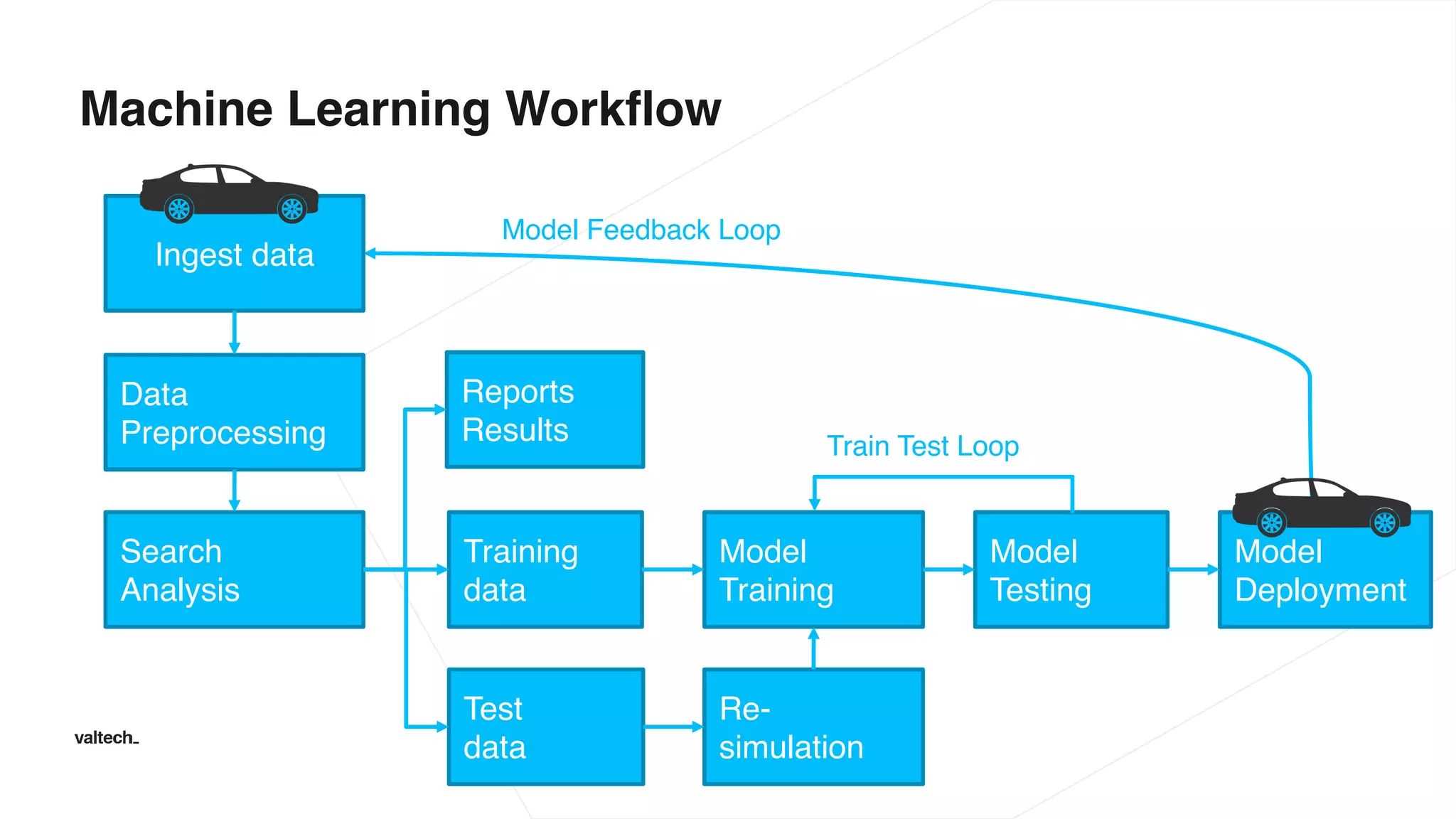
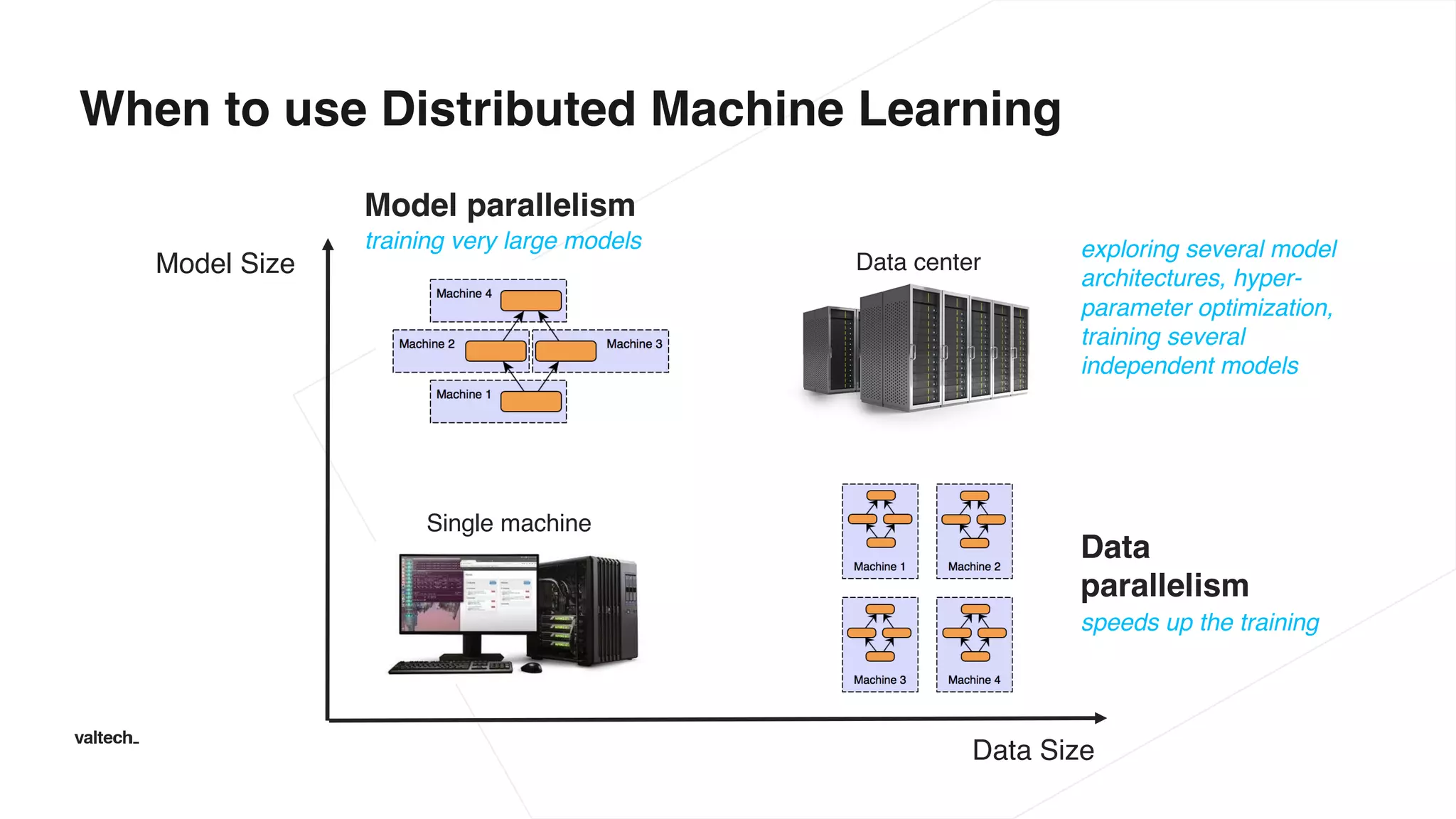
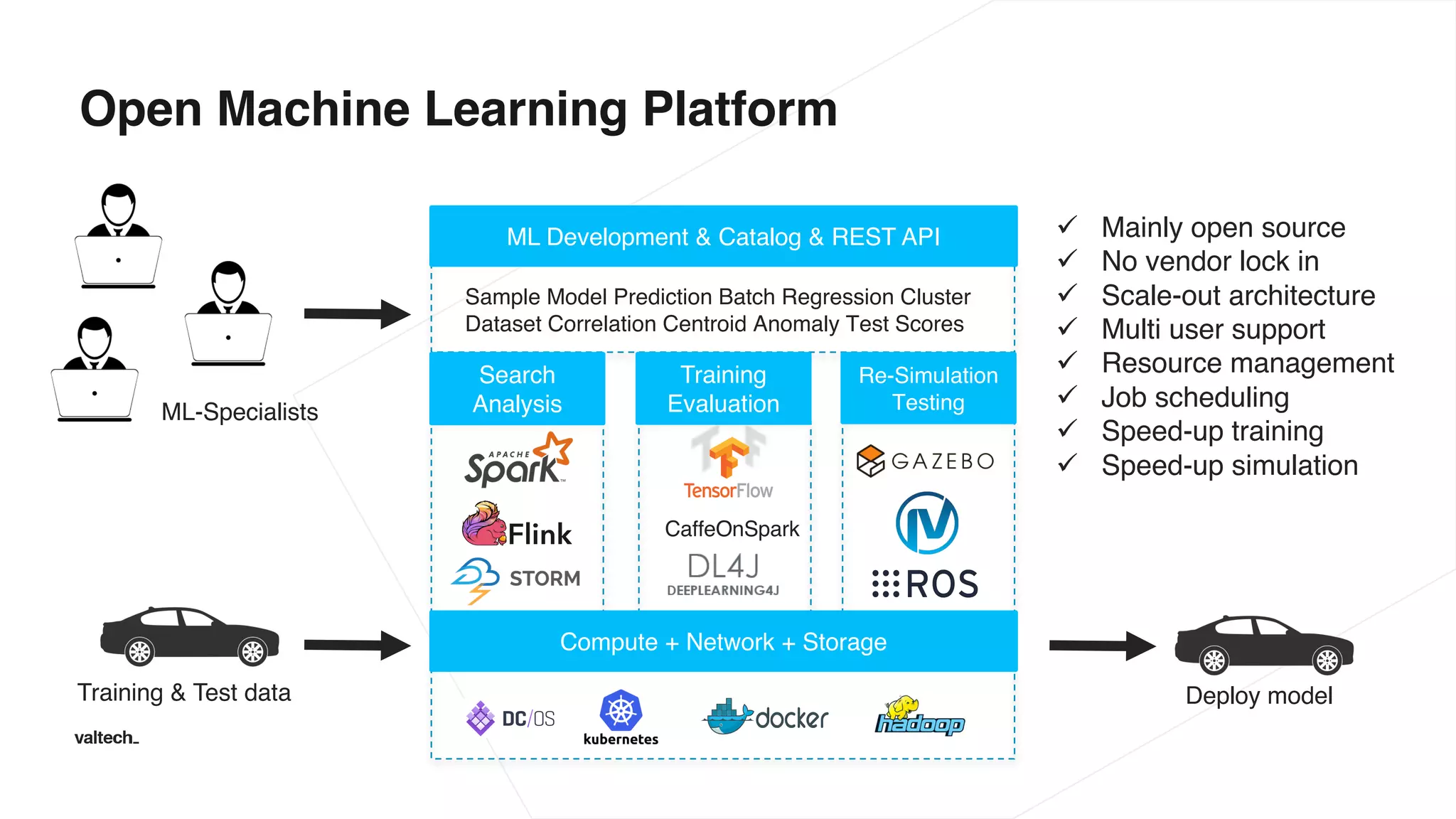
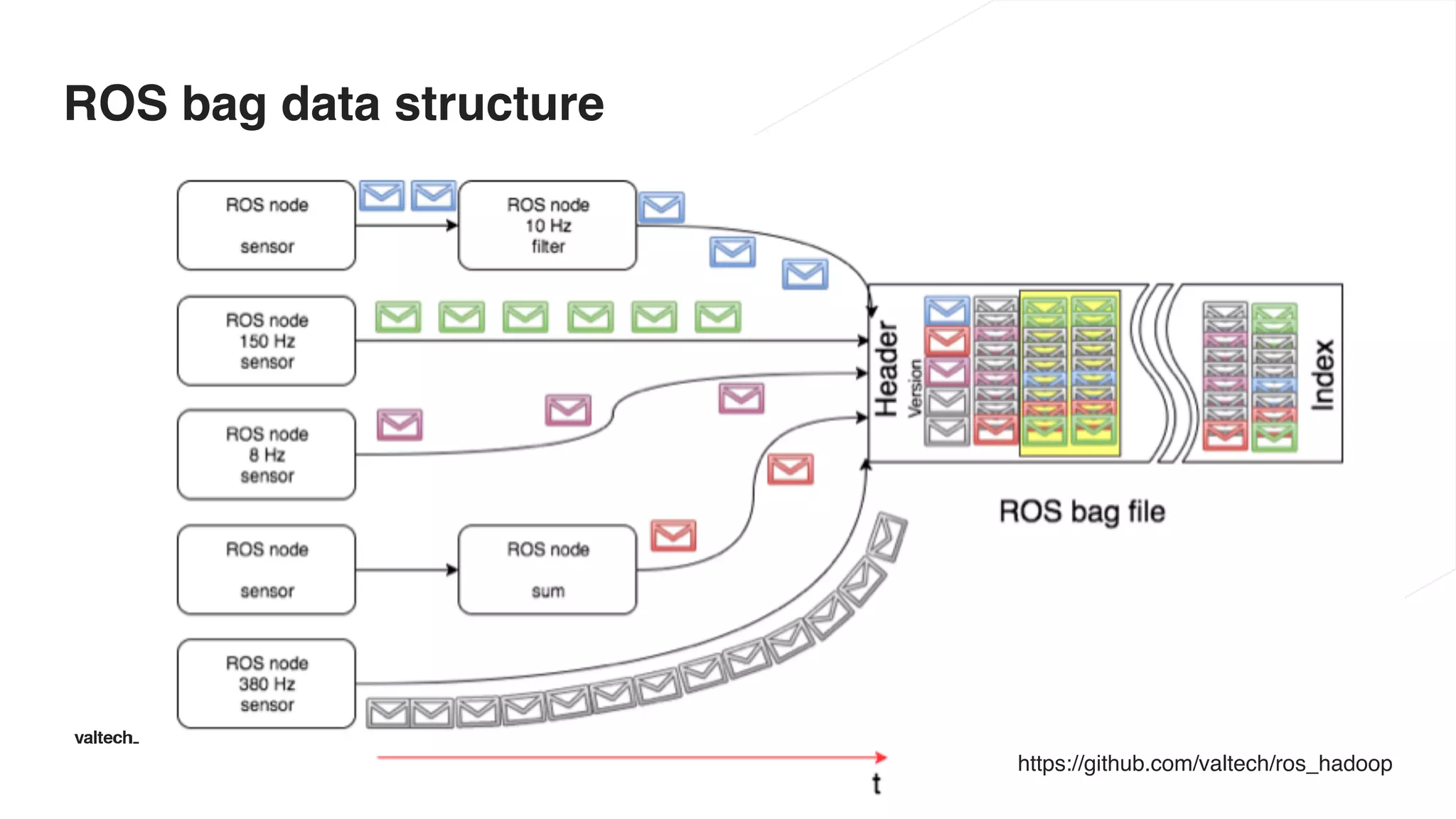
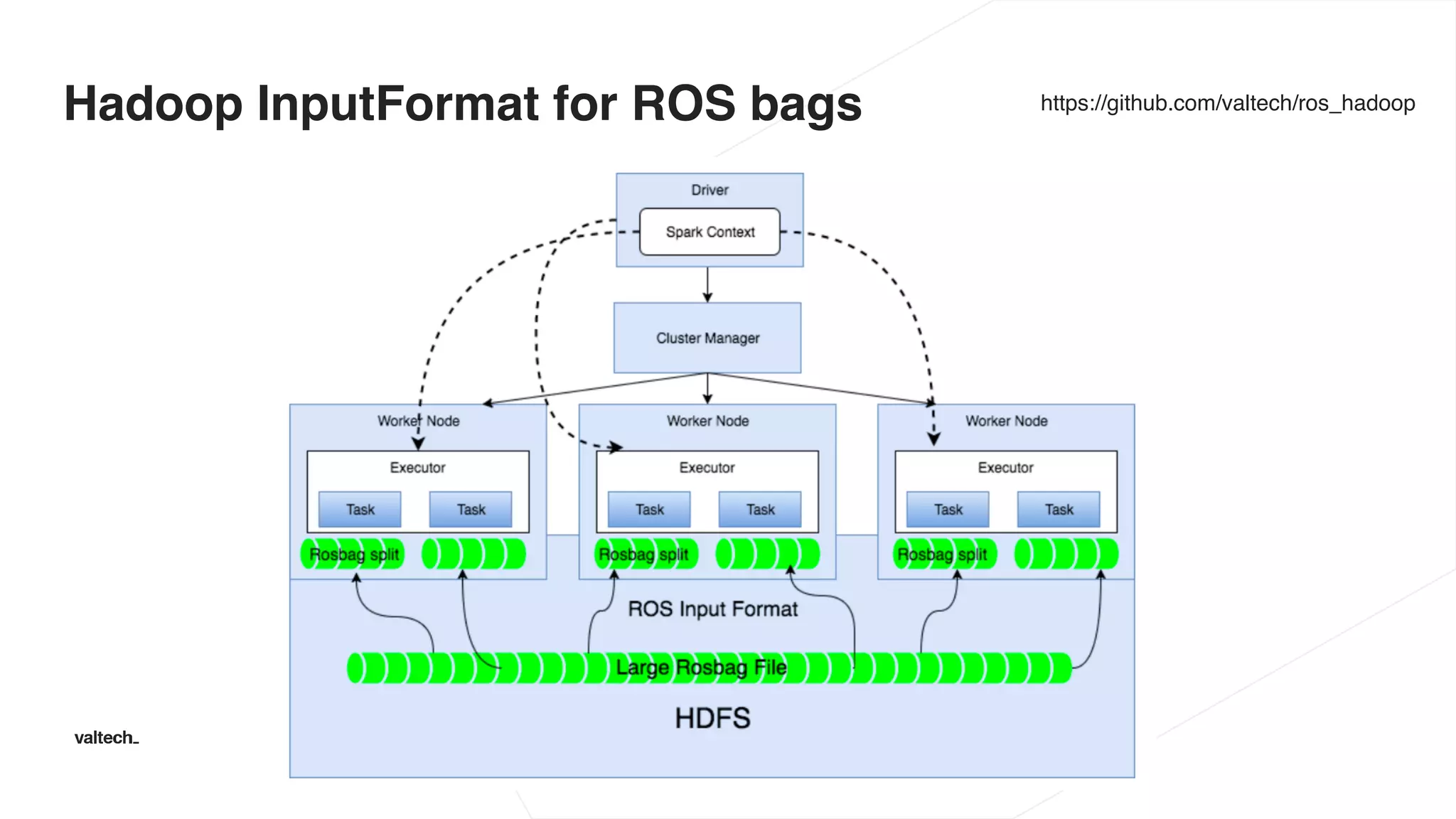
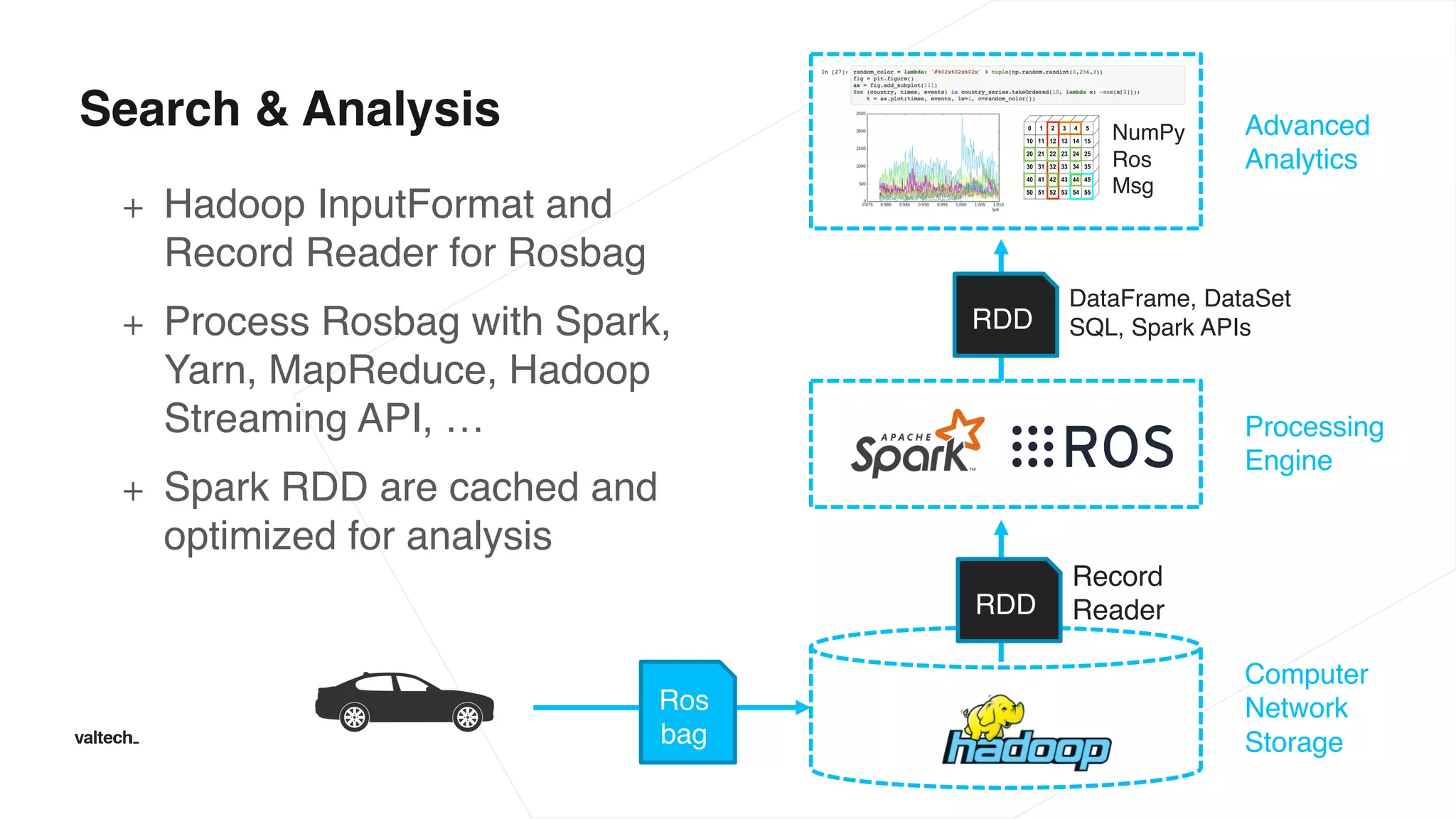
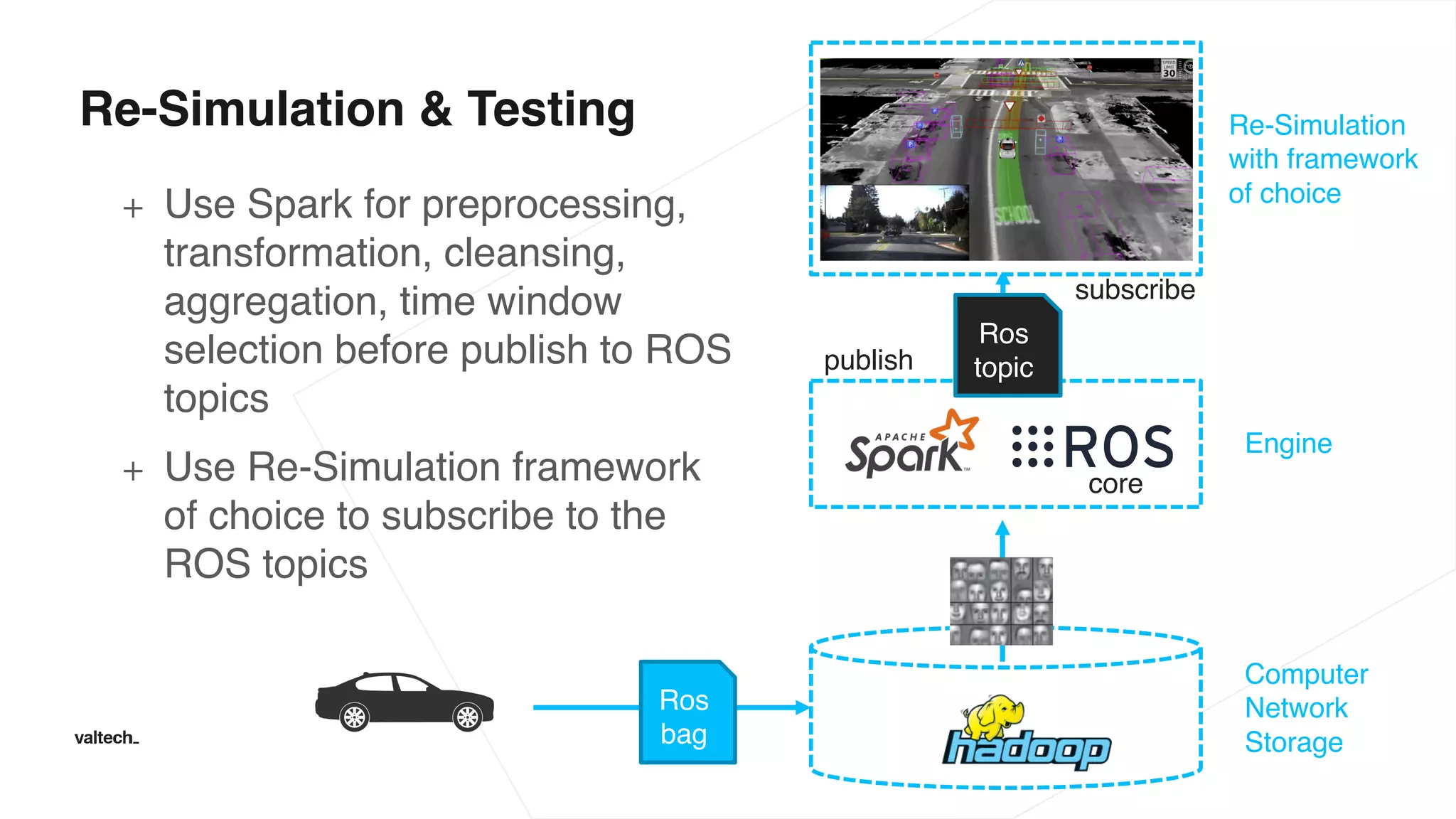

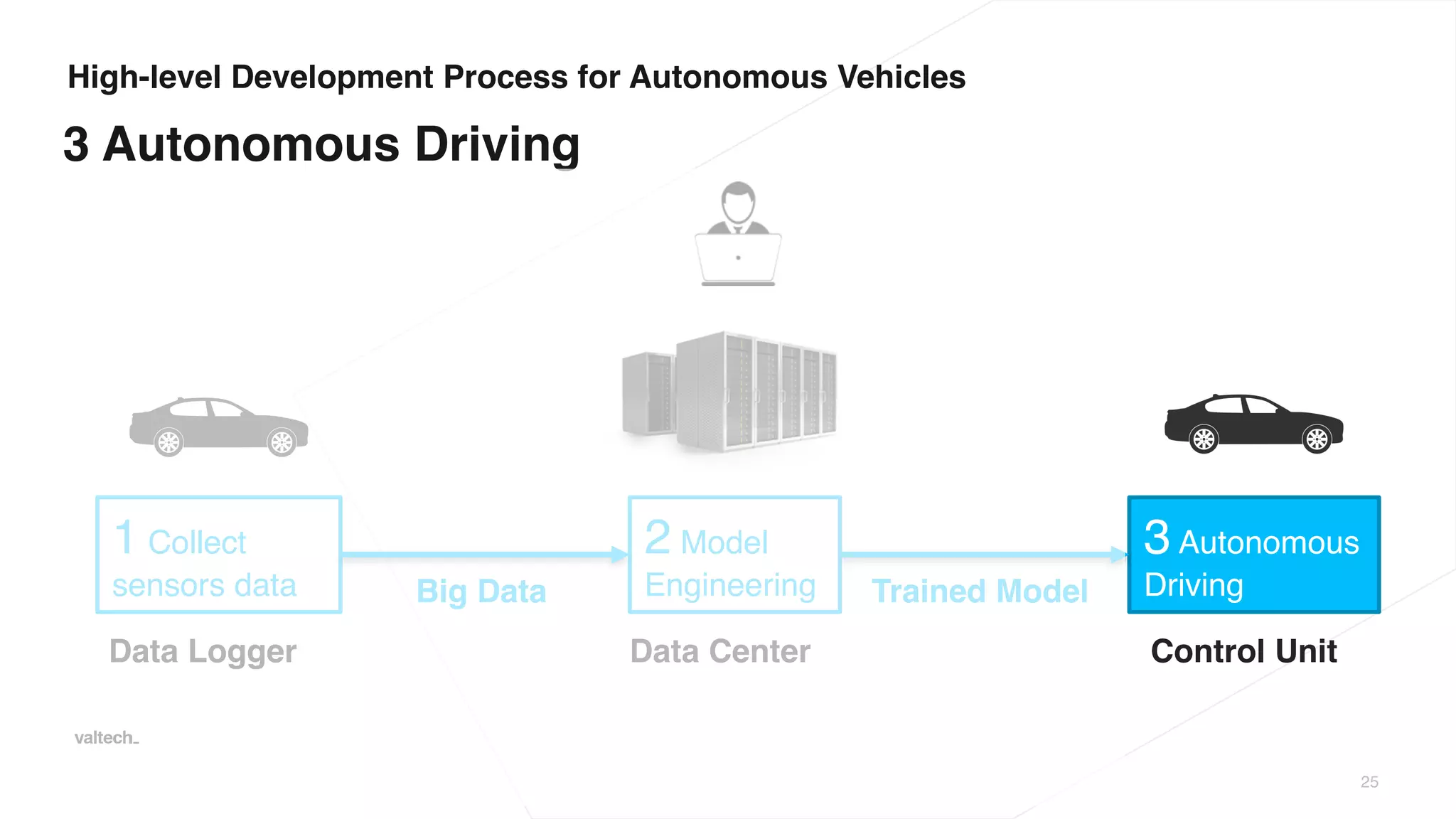


1. Sensors on autonomous vehicles collect terabytes of data per day that is stored and processed using distributed systems like Hadoop and Spark for machine learning tasks. 2. The collected data is used to train models for tasks like sensor fusion, localization, and trajectory planning using machine learning algorithms. These models are evaluated on large test data sets. 3. The trained models are deployed back on the vehicles to enable autonomous driving capabilities like obstacle detection and navigation without human intervention.










































































