強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
復元力は
ら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
m
= kx + F cos ωt dt2 −期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ2014年度秋学期 A. Asano, Kansai Univ.
81.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
ら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
復元力は
強制力は
d2x
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://d2x
m
= kx + F cos ωt dt2 −期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ2014年度秋学期 A. Asano, Kansai Univ.
82.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
運動方程式は
d2x
= kx + F cos ωt dt2 −応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://復元力は
強制力は
m
d2x
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://2014年度秋学期 A. Asano, Kansai Univ.
83.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
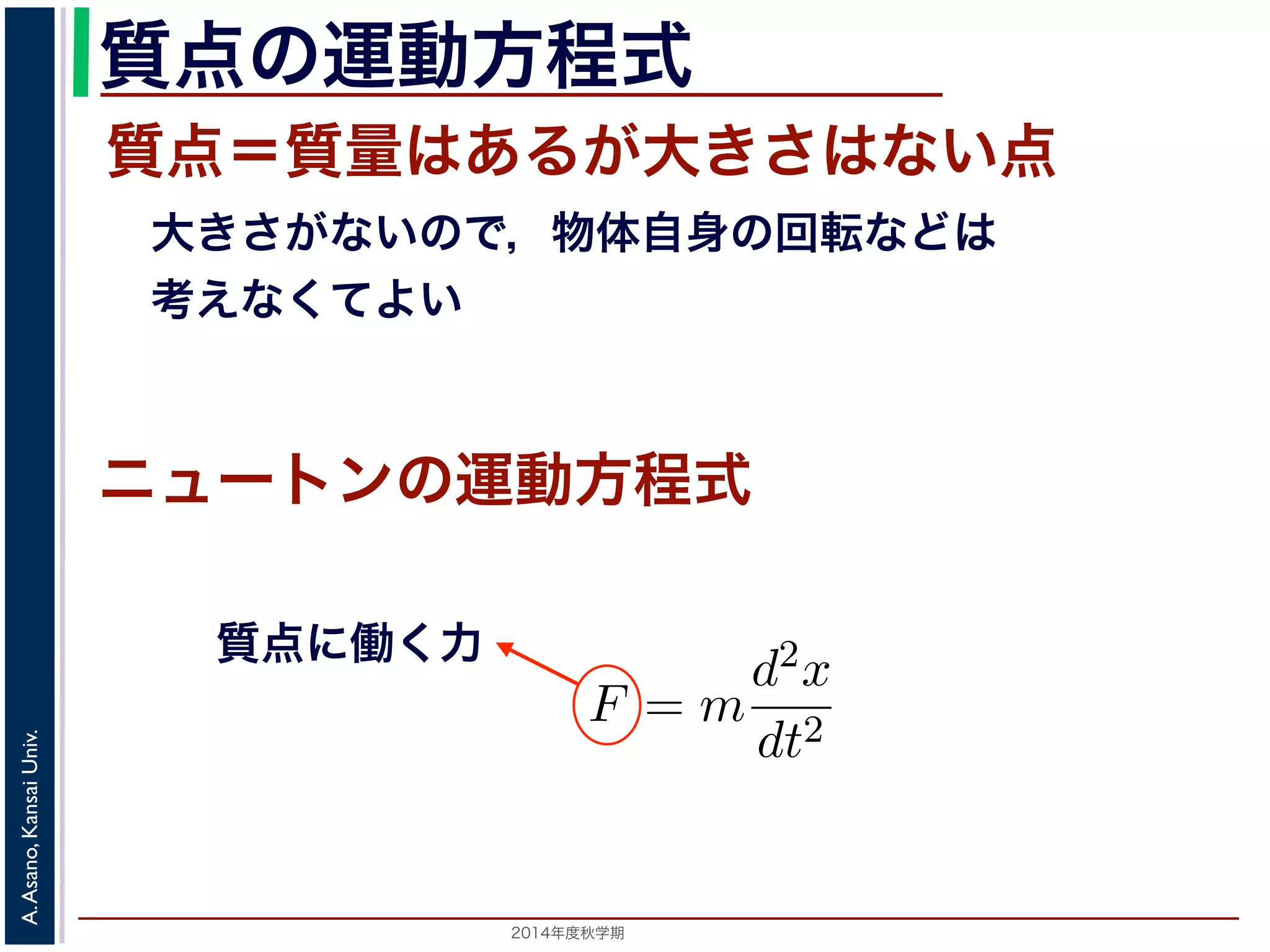
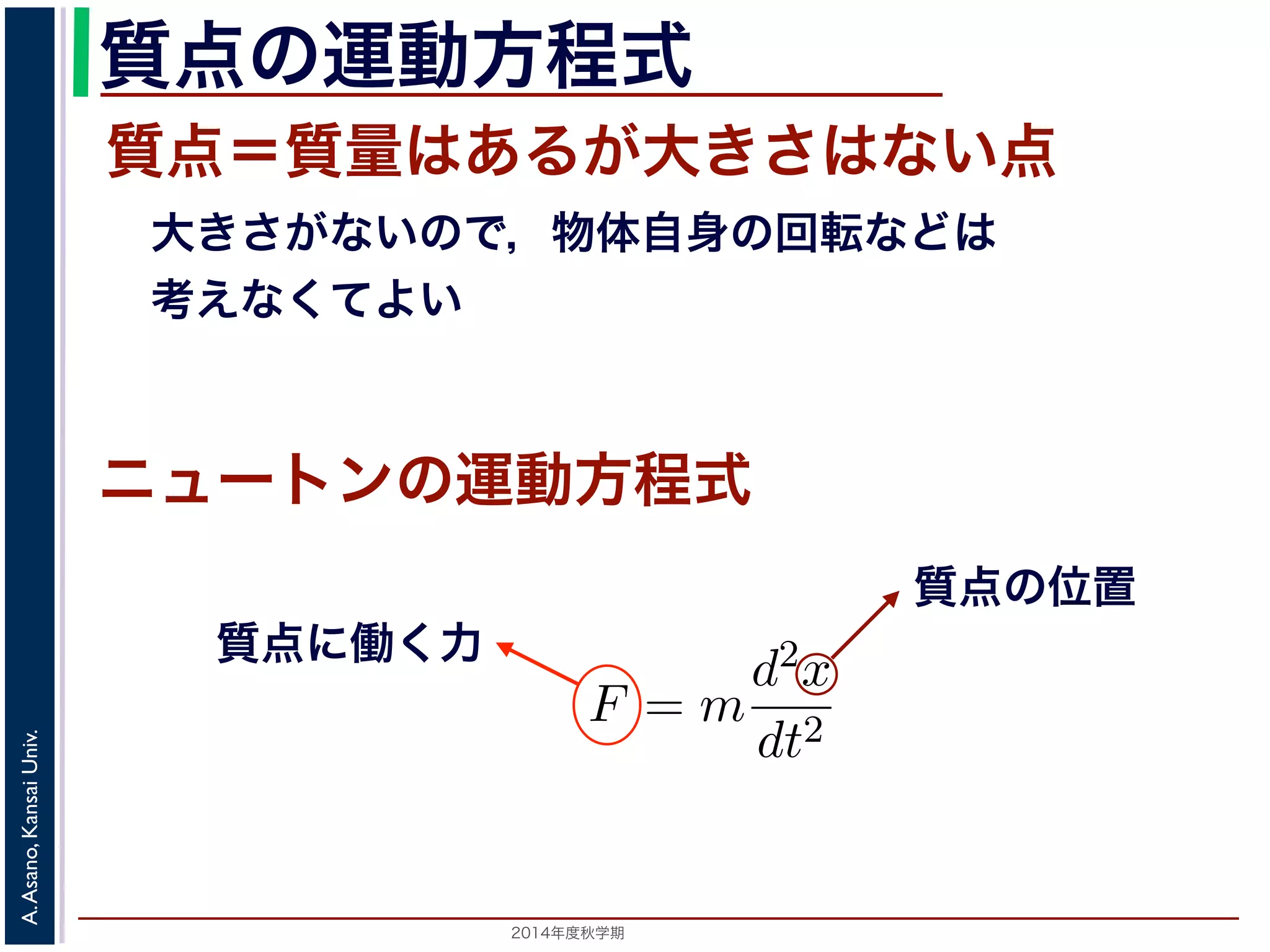
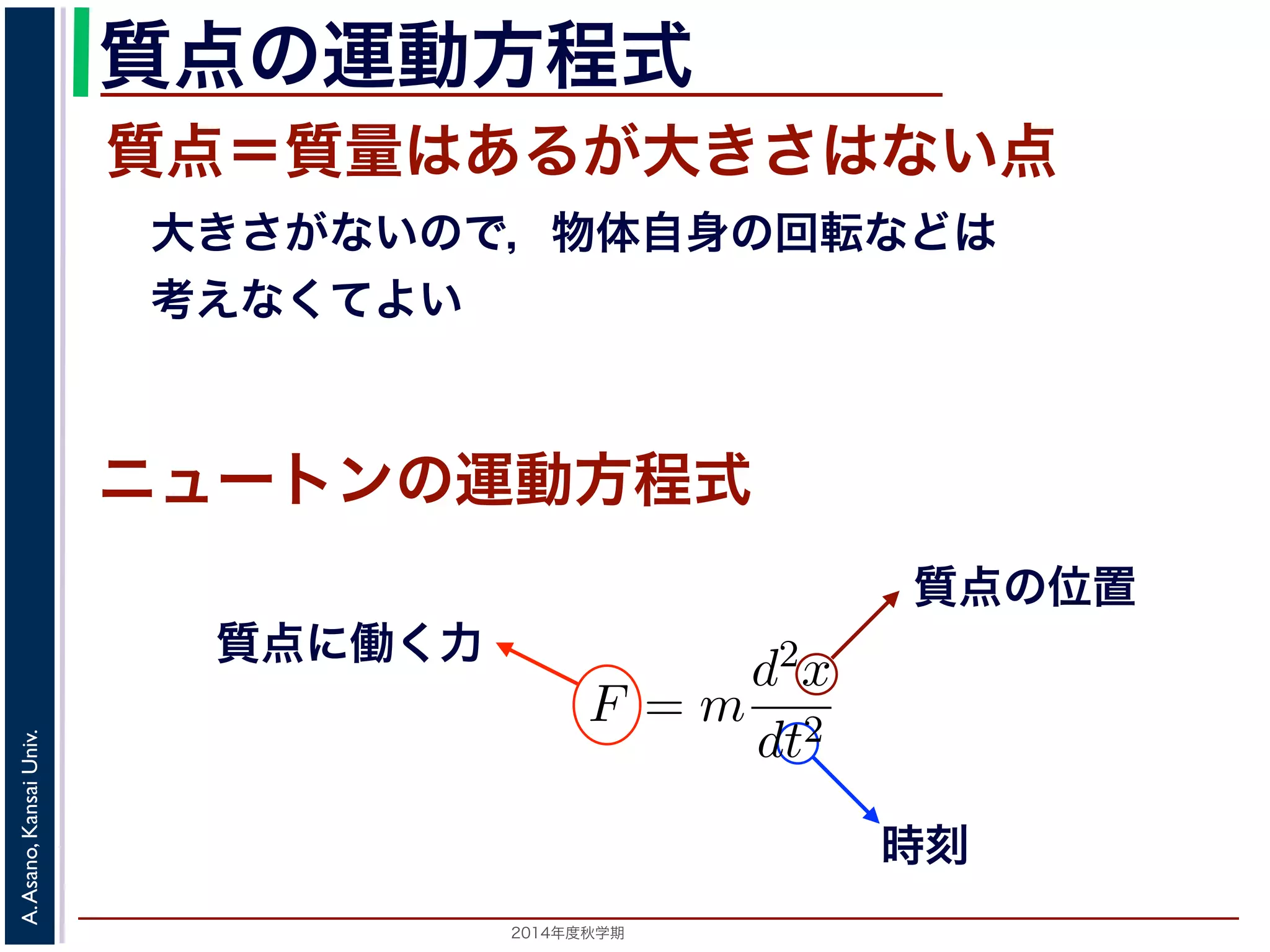
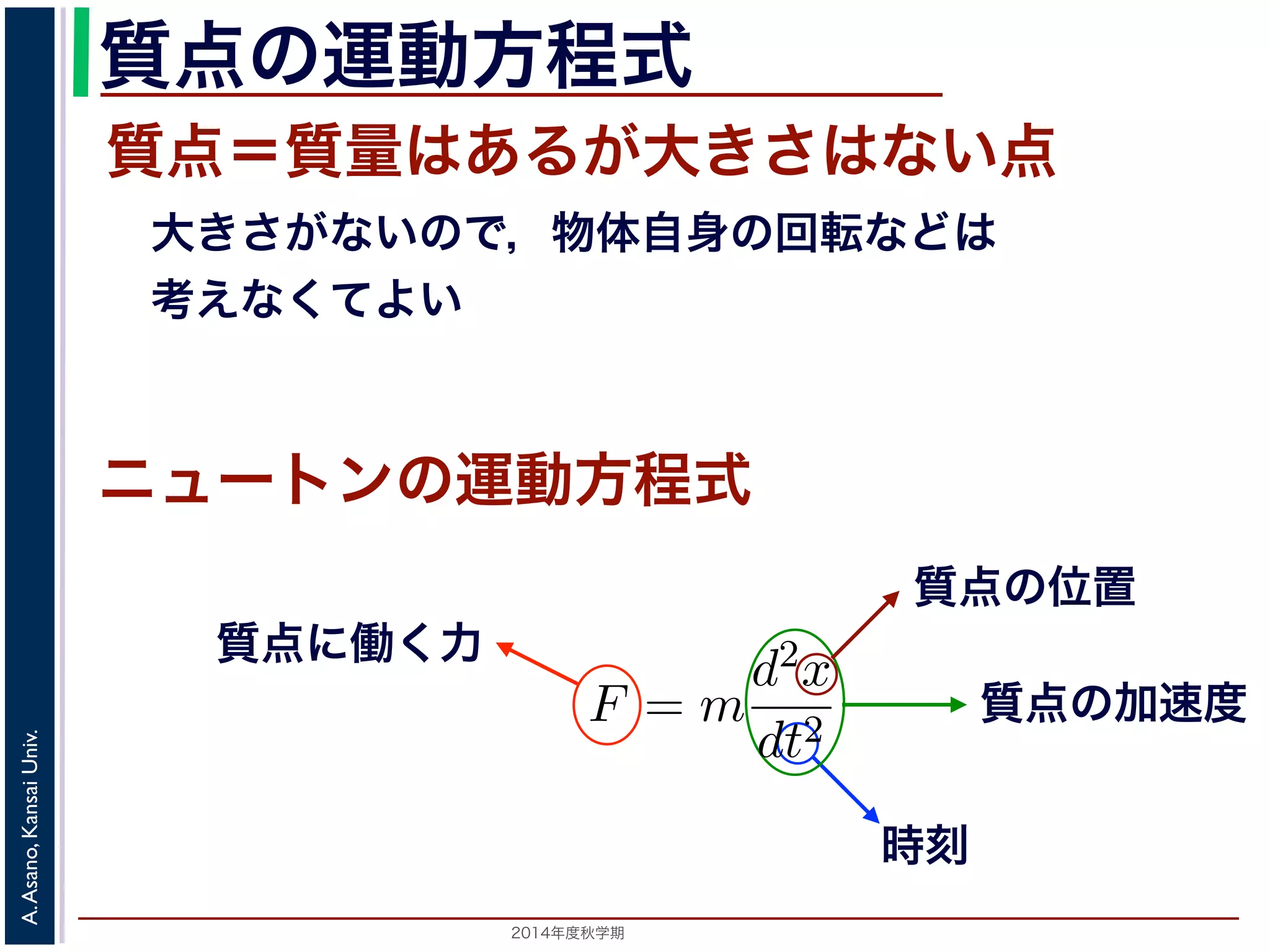
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://2014年度秋学期 A. Asano, Kansai Univ.
d2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
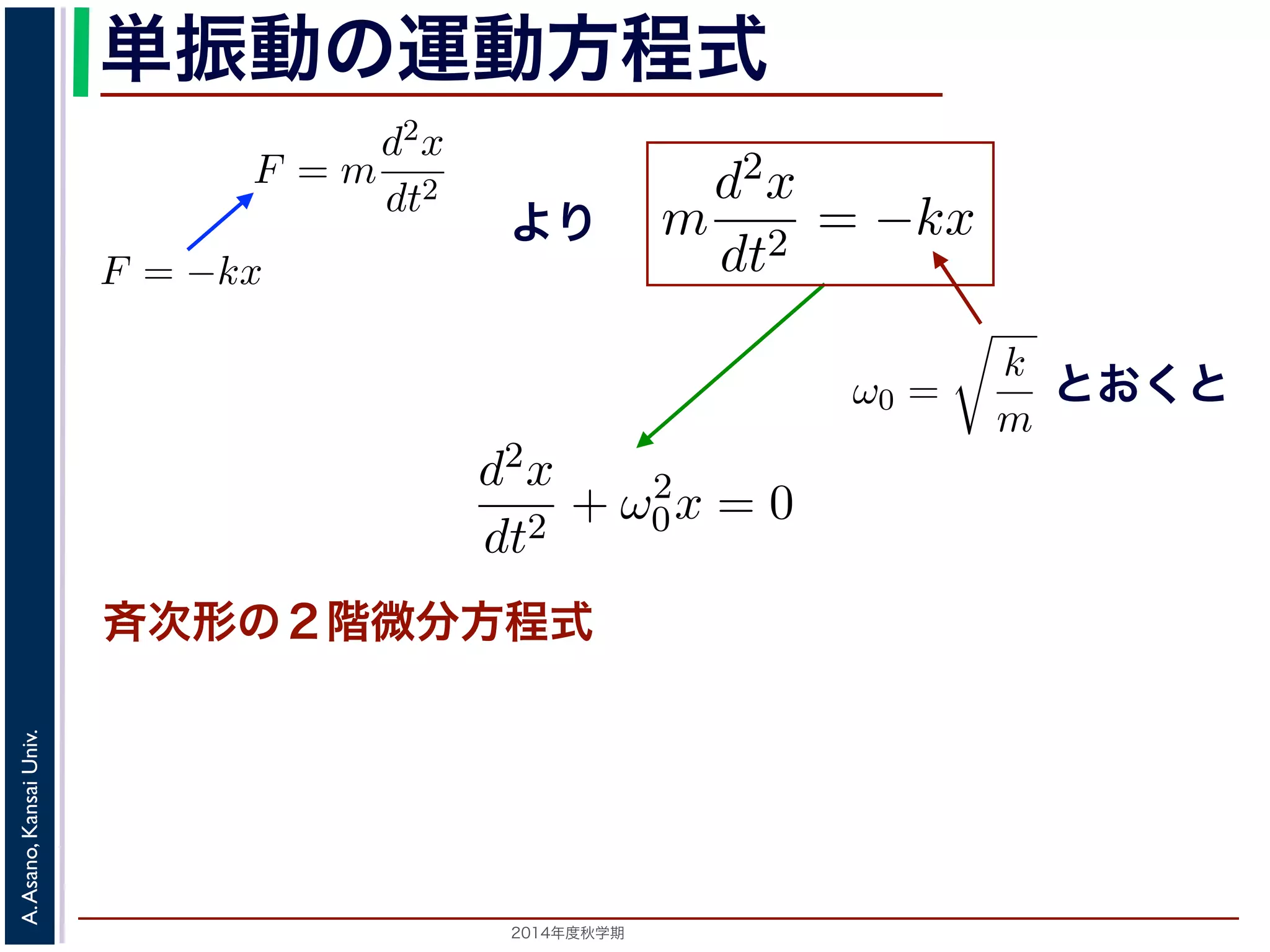
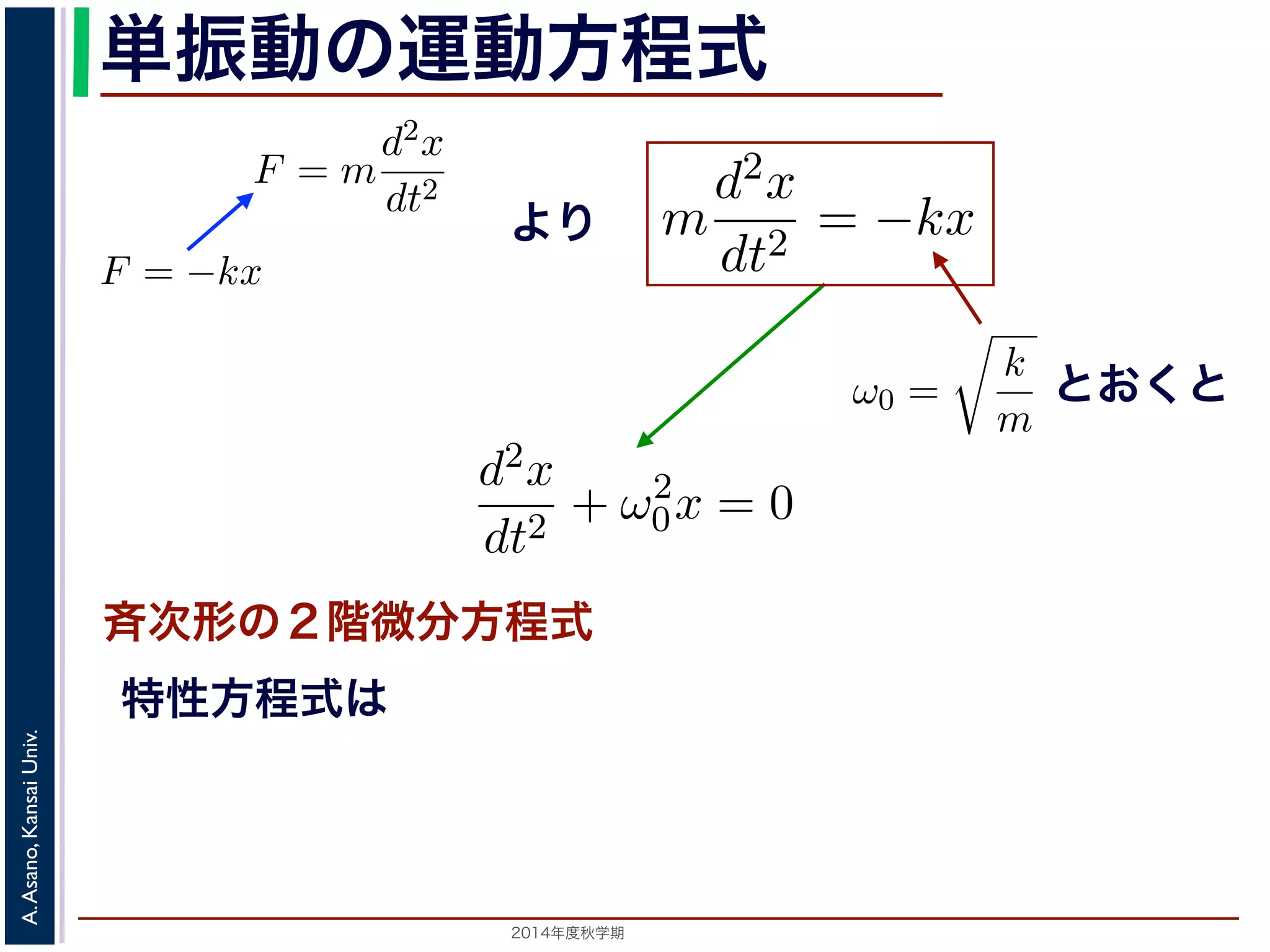
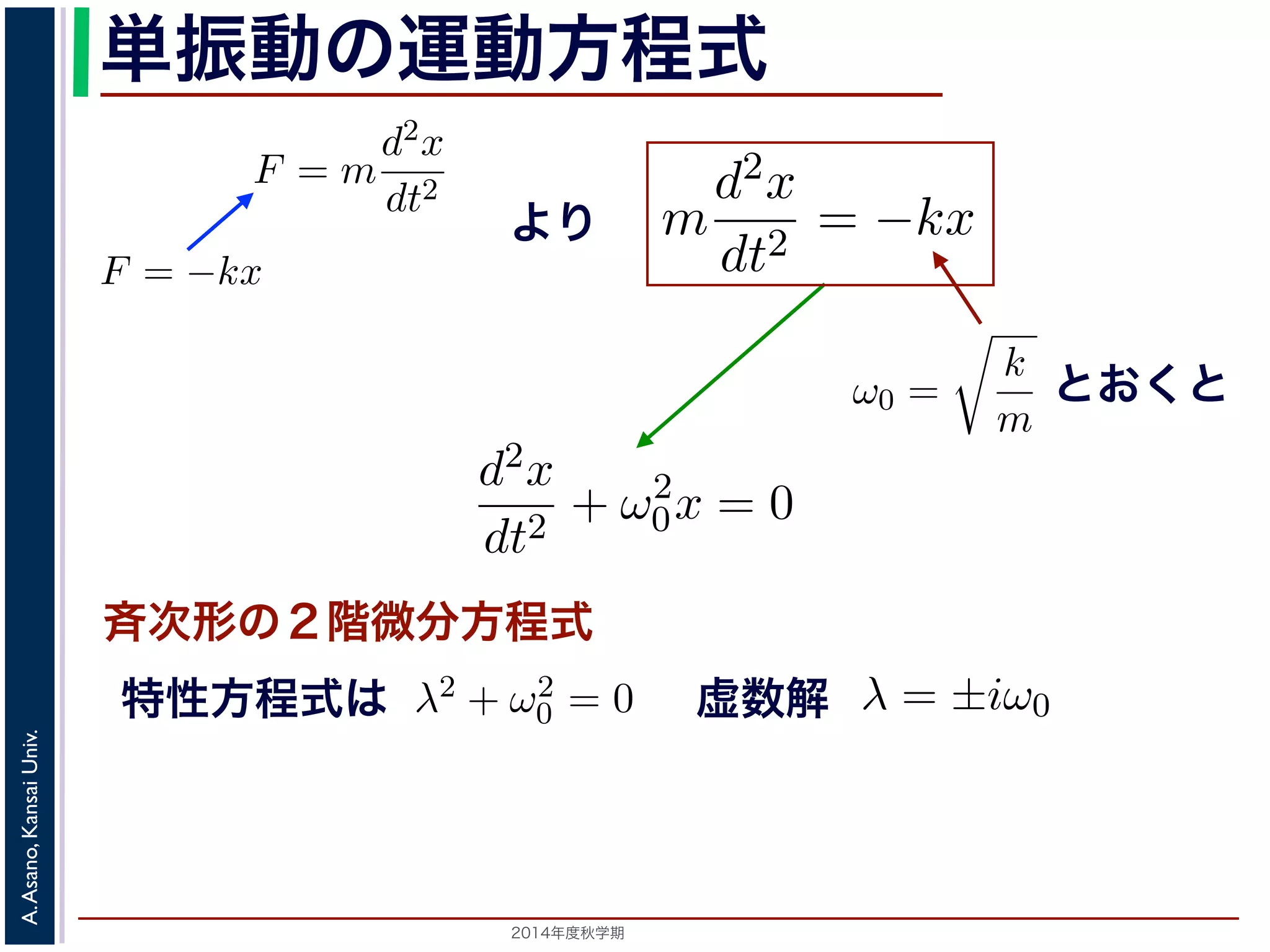
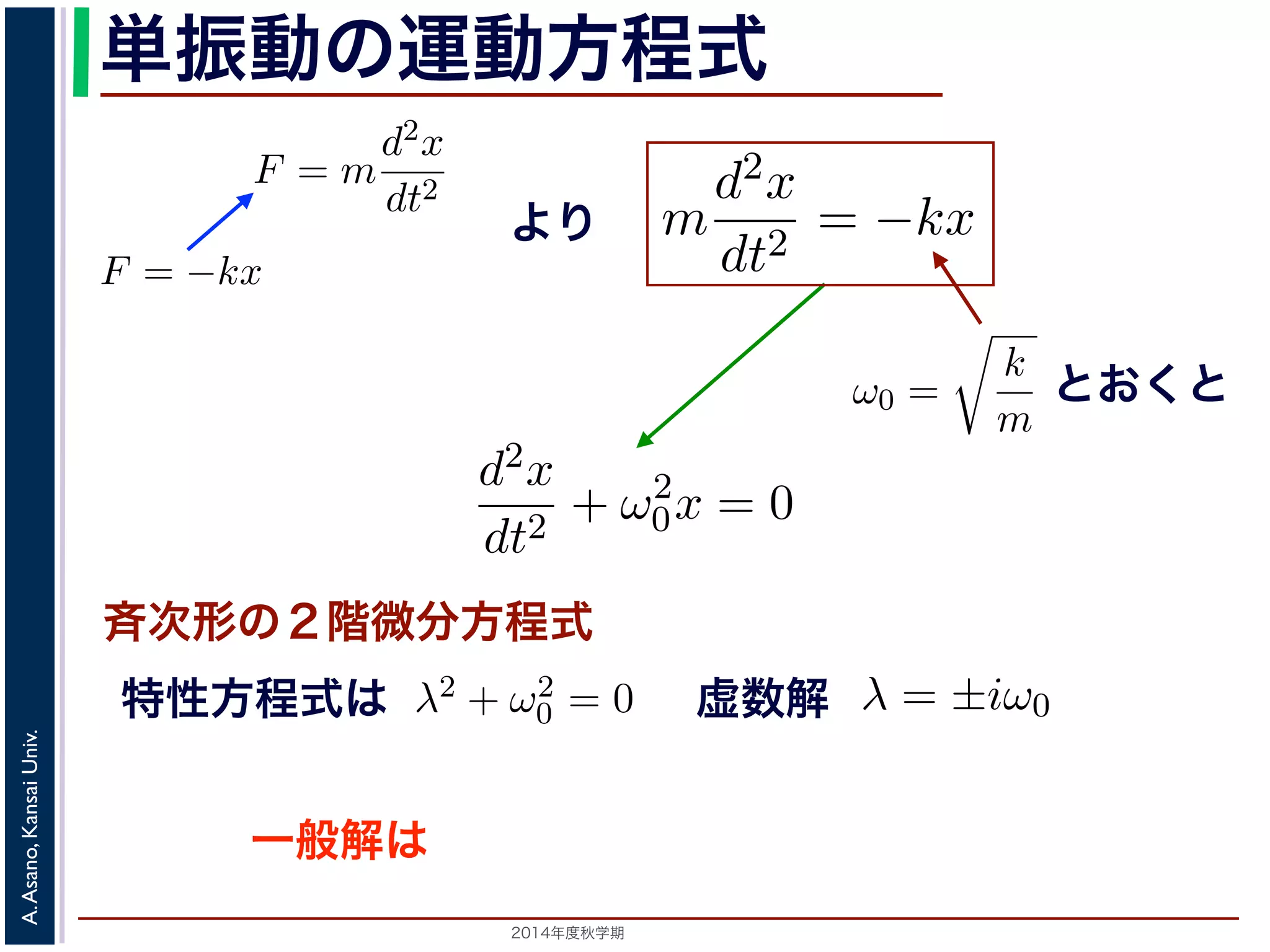
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
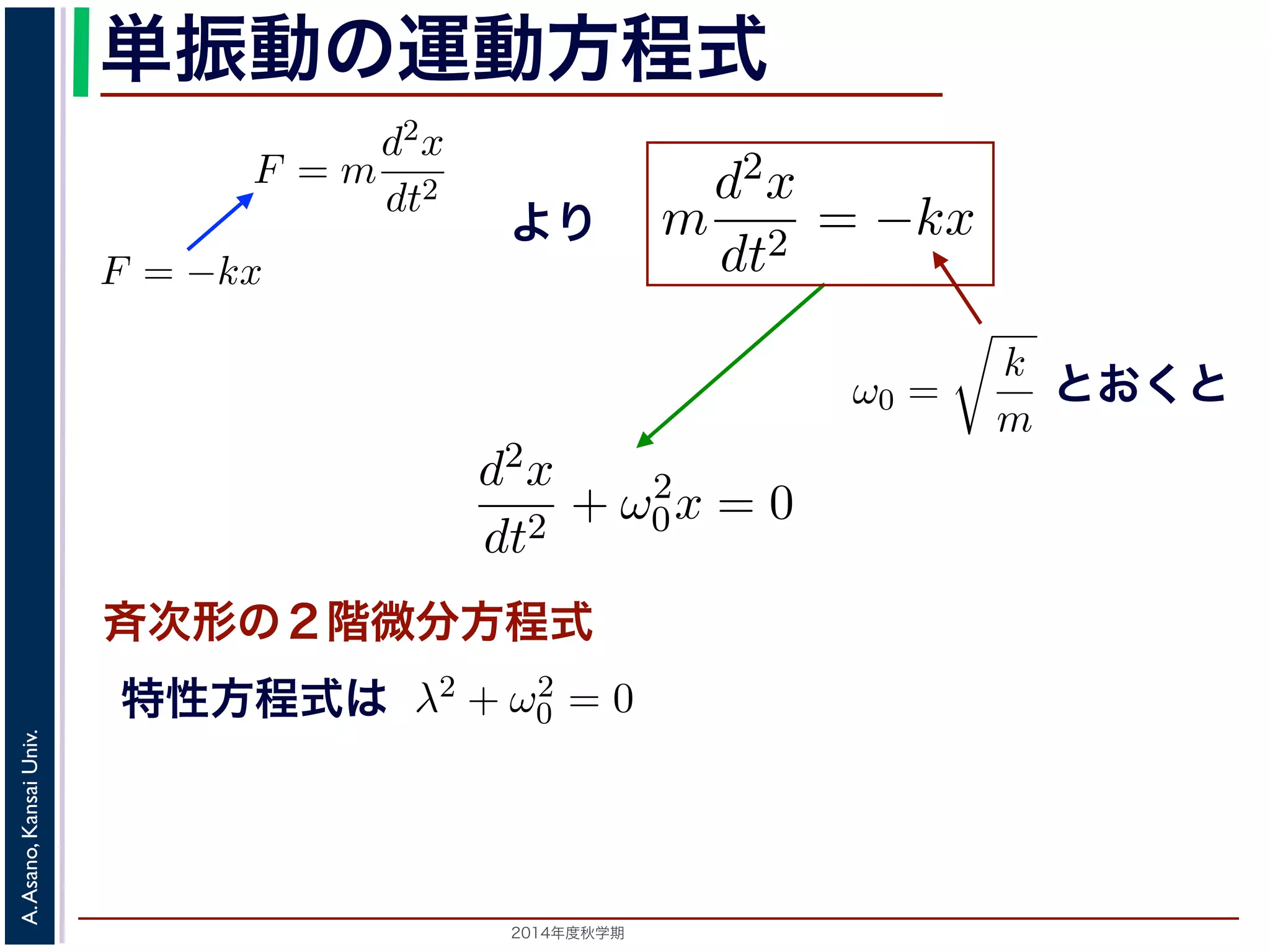
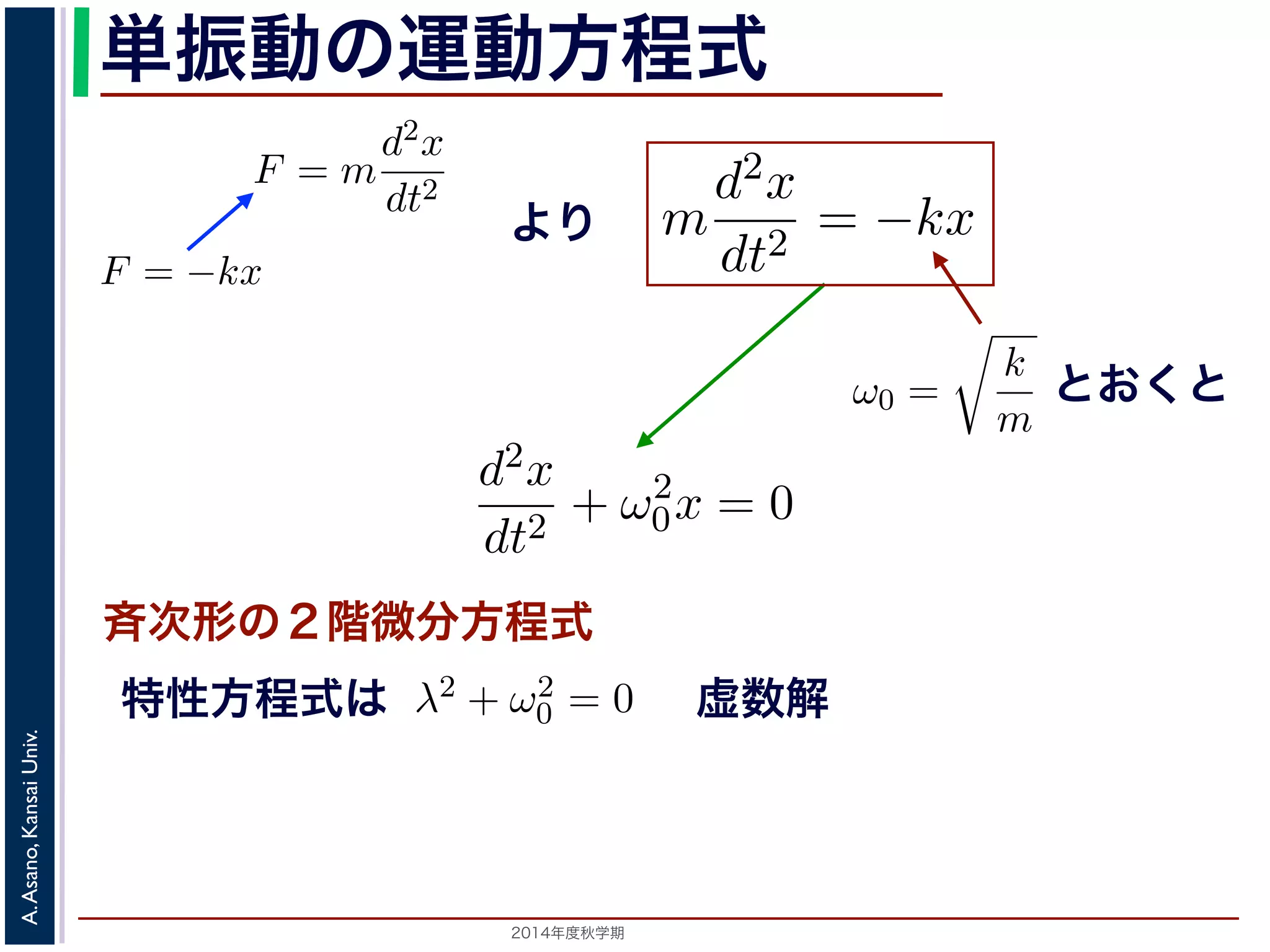
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応す式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおい
84.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。
85.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。
86.
この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。
これは
非斉次形の2階微分方程式
87.
強制振動の運動方程式
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
(12)
す。よって,(11) 式の非斉次形方程式の一般解は
f
88.
強制振動の運動方程式
に前々節のω0 を用いると,この方程式は
d2x
dt2 = −kx !
d2x
dt2 + ω2
0x = f cos ωt (11)
対応する斉次形の
2階微分方程式は
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
(12)
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
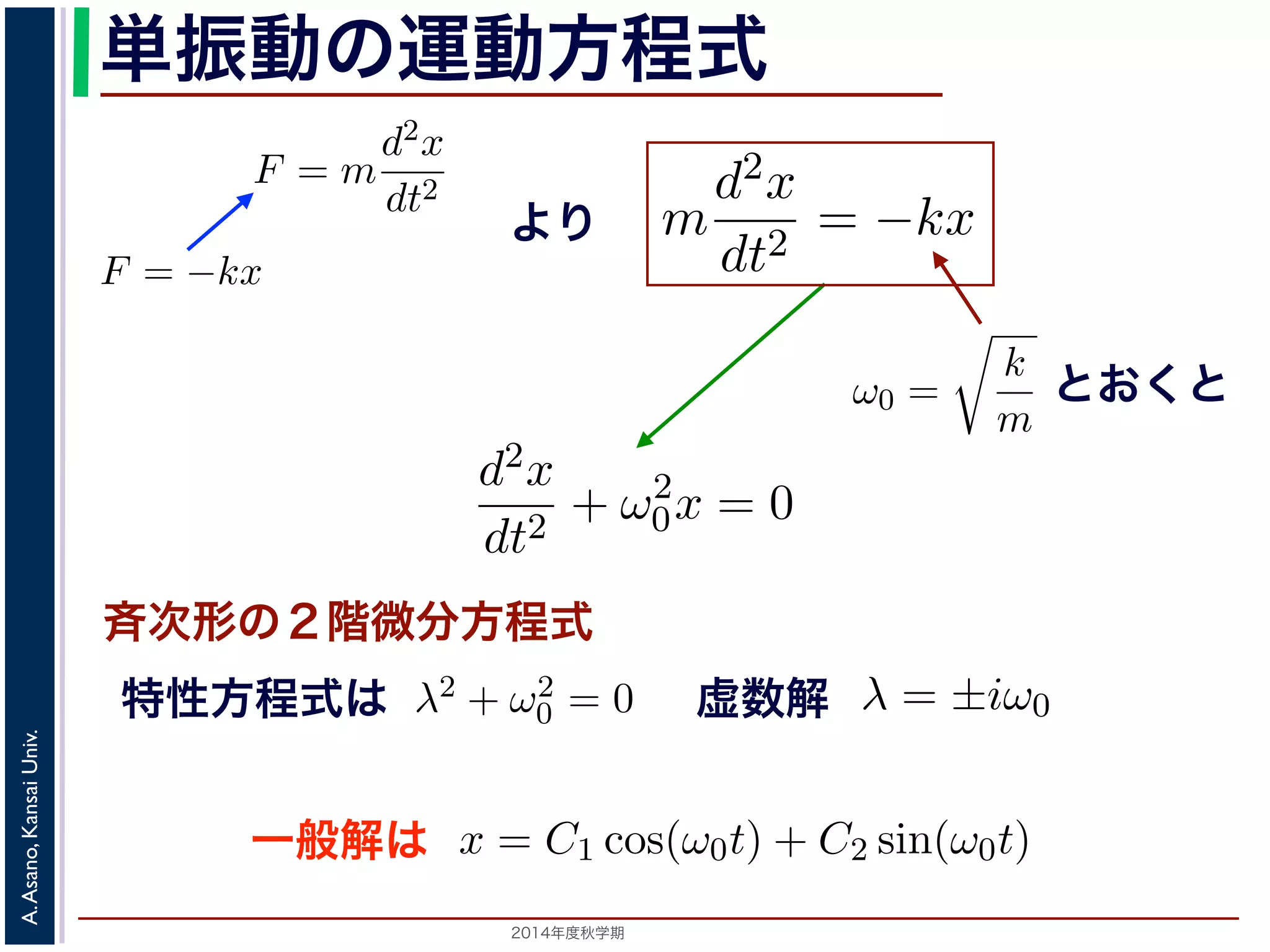
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
89.
強制振動の運動方程式
d2x
dt2= −kx !
対応する斉次形の
2階微分方程式は
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
90.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
91.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) と表されます。
特殊解をひとつ見つける
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
92.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
を入れてみると
0C cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
93.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
となります。F
d2x
f =
= −kx !
m
dt2 とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
を入れてみると
0C cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
− ω2 cos ωt
94.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。
95.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
非斉次形の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。
96.
程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
非斉次形の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。
m
d2x
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する斉式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt となります。
97.
強制振動
[強制振動]の式
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ωがω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ω0t
98.
強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ω0t
99.
て強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
[固有角振動数]
ω0t を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ,(11) 式の非斉次形方程式の一般解は
ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は
100.
て,(11) 式の非斉次形方程式の一般解は
強制振動
x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[強制振動]の式
強制力のないときの振動
[固有振動]
ω0t −[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) [2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin 固有振動数]
ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は
101.
て,(11) 式の非斉次形方程式の一般解は
強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
強制振動
ω0t [固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は
102.
て,(11) 式の非斉次形方程式の一般解は
強制振動
f
[強制振動]の式
ω2
0 − ω2 cos ωt (13)
強制力のないときの振動
[固有振動]
強制振動
ω0t ω0t + φ) +
[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,こ形では解くことができません。この場合
とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) 強制振動の角振動数 ω が固有角振動数 ω0 に近づくと
強制振動の項が大きくなる
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は
103.
て,(11) 式の非斉次形方程式の一般解は
強制振動
f
[強制振動]の式
ω2
0 − ω2 cos ωt (13)
強制力のないときの振動
[固有振動]
強制振動
ω0t ω0t + φ) +
[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,こ形では解くことができません。この場合
とおいて(11) 式に代入すると,
ω = ω0 のときは発散する
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) 強制振動の角振動数 ω が固有角振動数 ω0 に近づくと
強制振動の項が大きくなる
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は
104.
共鳴
ω =ω0 のときは強制振動の項が発散する
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程式d2x
cos ωt も2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
105.
共鳴
ω =ω0 のときは強制振動の項が発散する
x = Acos(ω0t + φ) +
cos ωt ω2
ω2 0 − りまとすな。
ります。F
f =
m
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もsin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあと2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
106.
共鳴
ω =ω0 のときは強制振動の項が発散する
x = Acos(ω0t + φ) +
cos ωt ω2
ω2 0 − りまとすな。
ります。F
f =
m
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もsin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあと2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
107.
共鳴
ω =ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
sin ω0t となります。この解は,t が大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ
108.
sin ω0t となります。この解は,tが大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ2π
動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくω0 共鳴
ω = ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
のときは,第2項の分母が0 になるので,この形では解くことが= t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
tC2ω2
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin −2C1ω0 sin ω0t + 2C2ω0 cos ら,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
解は
sin ω0t この解は,t が大きくなる,すなわち時間がたつにつれ,第2項がを共鳴といい,ときには建造物を破壊するほどの事態をひきおこす
109.
sin ω0t となります。この解は,tが大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ2π
動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくω0 共鳴
ω = ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
のときは,第2項の分母が0 になるので,この形では解くことが= t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
tC2ω2
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin −2C1ω0 sin ω0t + 2C2ω0 cos ら,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
解は
sin ω0t この解は,t が大きくなる,すなわち時間がたつにつれ,第2項がを共鳴といい,ときには建造物を破壊するほどの事態をひきおこす
110.
sin ω0t となります。この解は,tが大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ2π
動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくω0 共鳴
ω = ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
のときは,第2項の分母が0 になるので,この形では解くことが= t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
tC2ω2
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin −2C1ω0 sin ω0t + 2C2ω0 cos ら,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
解は
sin ω0t この解は,t が大きくなる,すなわち時間がたつにつれ,第2項がを共鳴といい,ときには建造物を破壊するほどの事態をひきおこす時間がたつと
振動しながら
発散する
111.
sin ω0t となります。この解は,tが大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ2π
動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくω0 共鳴
ω = ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
のときは,第2項の分母が0 になるので,この形では解くことが= t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
tC2ω2
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin −2C1ω0 sin ω0t + 2C2ω0 cos ら,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
解は
sin ω0t この解は,t が大きくなる,すなわち時間がたつにつれ,第2項がを共鳴といい,ときには建造物を破壊するほどの事態をひきおこす時間がたつと
振動しながら
発散する
[共鳴]



![単振動
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-17-2048.jpg)
![単振動
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
原点を釣り合い位置とし,そこからの距離に
比例する復元力が働くとすると
2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-18-2048.jpg)
![単振動
るかによって,さまざまな振
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
原点を釣り合い位置とし,そこからの距離に
比例する復元力が働くとすると
復元力といいます。釣り合い
すると,復元力F はF = −kx
の力が働くので,マイナスが
2014年度秋学期 A. Asano, Kansai Univ.
(2)](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-19-2048.jpg)
![単振動
るかによって,さまざまな振
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
原点を釣り合い位置とし,そこからの距離に
比例する復元力が働くとすると
復元力といいます。釣り合い
すると,復元力F はF = −kx
の力が働くので,マイナスが
2014年度秋学期 A. Asano, Kansai Univ.
(2)
位置](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-20-2048.jpg)
![単振動
るかによって,さまざまな振
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
原点を釣り合い位置とし,そこからの距離に
比例する復元力が働くとすると
復元力といいます。釣り合い
すると,復元力F はF = −kx
の力が働くので,マイナスが
正の定数位置
2014年度秋学期 A. Asano, Kansai Univ.
(2)](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-21-2048.jpg)
![単振動
るかによって,さまざまな振
もっとも単純な振動,復元力(下記)のみが働く
釣り合い位置にもどろうとする力[復元力]
原点を釣り合い位置とし,そこからの距離に
比例する復元力が働くとすると
復元力といいます。釣り合い
すると,復元力F はF = −kx
の力が働くので,マイナスが
正の定数位置
2014年度秋学期 A. Asano, Kansai Univ.
(2)
釣り合い位置からの方向の
逆向きの力なのでマイナス](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-22-2048.jpg)
![dt2 −d2x
+ ω2
dt2 単振動の運動方程式
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。して
より
0x = 0 (3)
λ2 + ω2
x = C1 cos(ω0t) + C2 sin(ω0t) れます。位置"
x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
x = Acos(ω0t + φ) れます。
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
らり,,質点ははx ど軸ち上らもで実[−数A,でA] なけの範囲を往復する振動をすることになりす。C1, 時間C2 t を秒の単位で測るとれきば,なりはませコんサ。イまンたの,三として
ω0 引数角に関な数
っている−1(を表tan−し,角C2/振動C1) 数とよばれます。また,1往復に必要な時間は,角度ですかx ら= Acos(ω0t で+ ,φ) これを周期といいます。さらに,1秒(間5)
2π/ω0 に往復ω0/2014年度秋学期 A. Asano, Kansai Univ.
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。この運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-36-2048.jpg)
![dt2 −d2x
+ ω2
dt2 単振動の運動方程式
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。して
より
0x = 0 (3)
x = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
x = Acos(ω0t + φ) れます。
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
らり,,質点ははx ど軸ち上らもで実[−数A,でA] なけの範囲を往復する振動をすることになりす。C1, 時間C2 t を秒の単位で測るとれきば,なりはませコんサ。イまンたの,三として
ω0 引数角に関な数
っている−1(を表tan−し,角C2/振動C1) 数とよばれます。また,1往復に必要な時間は,角度ですかx ら= Acos(ω0t で+ ,φ) これを周期といいます。さらに,1秒(間5)
2π/ω0 に往復ω0/2014年度秋学期 A. Asano, Kansai Univ.
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。この運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-37-2048.jpg)
![dt2 −d2x
+ ω2
dt2 単振動の運動方程式
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。して
より
0x = 0 (3)
x = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
三角関数を合成すると
x = Acos(ω0t + φ) れます。
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
らり,,質点はx す。C1, 時間C2 はをど軸ち上で[−A,A] の範囲を往復する振動をすることになりt 秒のらと単も位実で数で測なるけとれきば,なりはませコんサ。イまンたの,引三数角関数
して
ω0 になっているを−表tan−1(し,角C2/振動C1) 数とよばれます。また,1往復に必要な時間は,角度ですかx ら= Acos(ω0t で+ ,φ) これを周期といいます。さらに,1秒(間5)
2π/ω0 に往復ω0/2014年度秋学期 A. Asano, Kansai Univ.
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。この運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-38-2048.jpg)
![−d2x
dt2 + ω2
方程単式dt2 振は動2つの虚数解をもちます。λ2 + ω2
= 0で,特の性運方程動式は方2つ程λ の式
虚= 数±解iω0 0 λ = ±iω0 をもちます。して
x 0x = = C1 0 よcos(り
ω0t) x = C1 + cos(C2 ω0t) sin(+ C2 sin(ω0t) (3)
ω0t) れます。位置位置 "
x はx 実は数実で数すだかからら,,
C1, C2 はどちらも実数でなければ数分すで方る程とす式,でかA ,=
C1, ら第7,C2 回C2
1 でとC1, + 説もC2
明実C2 ,2し数たφ で方は= な法−どけでtan−解れちくばこら1(なとC2/らもがなでC1) 実い
き数まとすしで。て
特な性け方
ればC2
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
2,φ = −tan−1(C2/C1) として
三角関数を合成すると
x = Acos(ω0t + φ) れます。
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
らり,,質点ははx ど軸ち上らもで実[−数A,でA] す。C1, 時間C2 を秒の単位で測なの範囲を往復するけとれきば,なりはませコんサ。るま振た動,を三す角る関こ数
とになりt インの引数になっているを−ω0 表し,角振動数とよばれます。また,1往復に必要な時間は,角度ですから2π/ω0 で,これを周期といいます。さらに,1秒間に往復ω0/x = Acos(ω0t + φ) [−tan−1(C2/C1) として
x = Acos(ω0t + φ) (5)
2014年度秋学期 A. Asano, Kansai Univ.
2π A,でA] ,このれを範振囲動数をと往いい復ますす。る振動をするこA は振幅といいます。
とになで測るとき,ω0 はコサインの引数になっていの範囲を往復する振動をすることになります。この運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-39-2048.jpg)
![−d2x
dt2 + ω2
方程単式dt2 振は動2つのの運虚動数方解で,特性方程式は2つ程λ 式
= ±iω0 をもちます。の虚数解d2x
をもちます。0 = 0λ = ±iω0 = −kx して
dt2 となり,ω0 =
x = C1 cos(ω0t) + C2 sin(ω0t) 数ですから,C1, C2 はどちらも実数でなければC2
m
!
k
0x = 0 より
とすると
m
(3)
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていx = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明し程式はλ2 + ω2
"
C2
d2x
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
2,φ = −tan−1(C2/C1) として
三角関数を合成すると
x = Acos(ω0t + φ) = 0で,特性方程式は2つの虚数解をもれます。
0 λ = ±iω0 定数として
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
らり,,質点はす。C1, 時間C2 はx ど軸ち上らもで[−A,A] を秒の単位実で数で測なるけのれ範ば囲なをり往とき,はま復せするコんサ。イま振た動,をすることになりt ンの引三数角に関な数
っているを−ω0 表し,角振動数とよばれます。また,1往復に必要な時間は,角度ですから2π/ω0 で,これを周期といいます。さらに,1秒間に往復ω0/x = Acos(ω0t + φ) [−x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
tan−1(C2/C1) として
"
C2
x = Acos(ω0t + φ) (5)
2014年度秋学期 A. Asano, Kansai Univ.
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間を秒の単位で測るとき,はコサインの引数に2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。こ運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-40-2048.jpg)
![−d2x
dt2 + ω2
方程式dt2 は2つの虚数解λ = ±iω0 をもちま= す−kx 。となり,ω0 =
x = C1 cos(ω0t) + C2 sin(ω0t) 数ですから,C1, C2 はどちらも実数でなければC2
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間を秒の単位で測るとき,はコサインの引数にm
単振動の運動方程式
= 0で,特性方程式は2つの虚数解λ = ±iω0 をもdt2 ちます。0 して
!
d2x
= kx dt2 −となり,ω0 =
m
!
k
とすると
k
m
0x = 0 より
とすると
m
(3)
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていx = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説程式はλ2 + ω2
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明し程式はλ2 + ω2
"
C2
d2x
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) れます。
り,質点はx 軸上で[−A,A] の範囲を往復する振動をすることになりす。時間t を秒の単位で測るとき,ω0 はコサインの引数になっているを表し,角振動数とよばれます。また,1往復に必要な時間は,角度ですから2π/ω0 で,これを周期といいます。さらに,1秒間に往復ω0/0 = 0で,特性方程式は2つの虚数解λ = ±iω0 定数として
三角関数を合成すると
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をも定数として
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
ら,C1, C2 はどちらも実数でなければなりません。また,三角関数
−x = Acos(ω0t + φ) [−x = C1 cos(ω0t) + C2 と表されます。位置x は実数ですから,C1, C2 はどちらもを合成すると,A =
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は"
実数ですから,C1, C2 はどちらも実数でを合成すると,A =
C2
tan−1(C2/C1) として
"
C2
x = Acos(ω0t + φ) (5)
1 + C2
2,φ = −tan−1(C2/C1) としx = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動を2014年度秋学期 A. Asano, Kansai Univ.
1 + C2
2,φ = −tan−1(C2/C1) として
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。こ運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-41-2048.jpg)
![−d2x
dt2 + ω2
方程式dt2 は2つの虚数解λ = ±iω0 をもちま= す−kx 。となり,ω0 =
x = C1 cos(ω0t) + C2 sin(ω0t) 数ですから,C1, C2 はどちらも実数でなければC2
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間を秒の単位で測るとき,はコサインの引数にm
単振動の運動方程式
= 0で,特性方程式は2つの虚数解λ = ±iω0 をもdt2 ちます。0 して
!
d2x
= kx dt2 −となり,ω0 =
m
!
k
とすると
k
m
0x = 0 より
とすると
m
(3)
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていx = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説程式はλ2 + ω2
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明し程式はλ2 + ω2
"
C2
d2x
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) れます。
り,質点はx 軸上で[−A,A] の範囲を往復する振動をすることになりす。時間t を秒の単位で測るとき,ω0 はコサインの引数になっているを表し,角振動数とよばれます。また,1往復に必要な時間は,角度ですから2π/ω0 で,これを周期といいます。さらに,1秒間に往復ω0/0 = 0で,特性方程式は2つの虚数解λ = ±iω0 定数として
三角関数を合成すると
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をも定数として
単振動の式
C2
,tan−1(とし1 + 2φ = −C2/C1) x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をx = C1 cos(ω0t) + C2 sin(ω0t) (4)
ら,C1, C2 はどちらも実数でなければなりません。また,三角関数
−x = Acos(ω0t + φ) [−x = C1 cos(ω0t) + C2 と表されます。位置x は実数ですから,C1, C2 はどちらもを合成すると,A =
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は"
実数ですから,C1, C2 はどちらも実数でを合成すると,A =
C2
tan−1(C2/C1) として
"
C2
x = Acos(ω0t + φ) (5)
2014年度秋学期 A. Asano, Kansai Univ.
1 + C2
2,φ = −tan−1(C2/C1) として
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。こ運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-42-2048.jpg)
![−d2x
dt2 + ω2
方程式dt2 は2つの虚数解λ = ±iω0 をもちま= す−kx 。となり,ω0 =
x = C1 cos(ω0t) + C2 sin(ω0t) 数ですから,C1, C2 はどちらも実数でなければC2
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間を秒の単位で測るとき,はコサインの引数にm
単振動の運動方程式
= 0で,特性方程式は2つの虚数解λ = ±iω0 をもdt2 ちます。0 して
!
d2x
= kx dt2 −となり,ω0 =
m
!
k
とすると
k
m
0x = 0 より
とすると
m
(3)
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていx = C1 cos(ω0t) + C2 sin(ω0t) れます。位置x は実数ですから,C1, C2 はどちらも実数でなければすると,A =
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説程式はλ2 + ω2
位置 x は実数だから,
C1, C2 とも実数でなければならない
λ2 + ω2
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明し程式はλ2 + ω2
"
C2
d2x
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
分方程式で,第7回で説明した方法で解くことができます。特性方
2つの虚数解λ = ±iω0 をもちます。よって,一般解はC1, C2 を
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) れます。
り,質点はx 軸上で[−A,A] の範囲を往復する振動をすることになりす。時間t を秒の単位で測るとき,ω0 はコサインの引数になっているを表し,角振動数とよばれます。また,1往復に必要な時間は,角度ですから2π/ω0 で,これを周期といいます。さらに,1秒間に往復ω0/0 = 0で,特性方程式は2つの虚数解λ = ±iω0 定数として
三角関数を合成すると
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をも定数として
単振動の式
x = C1 cos(ω0t) + C2 sin(ω0t) (4)
ら,C1, C2 はどちらも実数でなければなりません。また,三角関数
−x = Acos(ω0t + φ) [−x = C1 cos(ω0t) + C2 と表されます。位置x は実数ですから,C1, C2 はどちらもを合成すると,A =
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は"
実数ですから,C1, C2 はどちらも実数でを合成すると,A =
C2
tan−1(C2/C1) として
"
C2
x = Acos(ω0t + φ) (5)
1 + C2
2,φ = −tan−1(C2/C1) としx = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をx 2014年度秋学期 A. Asano, Kansai Univ.
1 + C2
2,φ = −tan−1(C2/C1) として
軸上で [–A, A] の範囲を往復する振動
2π で,これを振動数といいます。A は振幅といいます。
の範囲を往復する振動をすることになります。こ運動を単振動と
き,はコサインの引数になっている角度が1秒間に何ラジアン](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-43-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
2,φ = −tan−1(C2/C1) として
x 軸上で [–A, A] の範囲を往復する振動
x = Acos(ω0t + φ) [−A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていばれます。また,1往復に必要な時間は,角度これUniv.
Kansai を周期といいます。さらに,1秒間に往復数とAsano, いいます。A は振幅といいます。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-44-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
2,φ = −tan−1(C2/C1) として
x 軸上で [–A, A] の範囲を往復する振動
x = Acos(ω0t + φ) [振幅]
[−A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていばれます。また,1往復に必要な時間は,角度これUniv.
Kansai を周期といいます。さらに,1秒間に往復数とAsano, いいます。A は振幅といいます。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-45-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
2,φ = −tan−1(C2/C1) として
x 軸上で [–A, A] の範囲を往復する振動
x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていばれます。また,1往復に必要な時間は,角度これUniv.
Kansai を周期といいます。さらに,1秒間に往復数とAsano, いいます。A は振幅といいます。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-46-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
2,φ = −tan−1(C2/C1) として
x 軸上で [–A, A] の範囲を往復する振動
x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
時間が1秒進むと,
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていばれます。また,1往復に必要な時間は,角度これUniv.
Kansai を周期といいます。さらに,1秒間に往復数とAsano, いいます。A は振幅といいます。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-47-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
2,φ = −tan−1(C2/C1) として
x 軸上で [–A, A] の範囲を往復する振動
x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
時間が1秒進むと,
A,A] の範囲を往復する振動をすることになで測るとき,ω0 はコサインの引数になっていばれます。また,1往復に必要な時間は,角度これUniv.
Kansai を周期といいます。さらに,1秒間に往復数とAsano, いいます。A は振幅といいます。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-48-2048.jpg)
![数です単か振ら動,C1, の式
C2 はどちらも実数でなければC2
は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことがでω2
= 0,でφ ,特= 性方−程tan−式は2つ1(の虚数解0 2C2/C1) λ = とiω0 しをて
もちます。よって,一x 軸上で [–A, A] の範囲±を往復する振動
x = C1 cos(ω0t) + C2 sin(ω0t) 。位置x は実数ですから,C1, C2 はどちらも実数でなければなりません。,x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
1 + C2
2,φ = −tan−1(C2/C1) として
時間が1秒進むと,
A =
"
C2
が何ラジアン進むか
A,A] の範囲を往x 復= Acos(するω0t 振+ 動φ) をすることにな。
で測るとき,ω0 はコサインの引数になってい点はx 軸上で[−A,A] の範囲を往復する振動をすることになります。この間ばt をれ秒まの単す位。で測まるとたき,1,ω0 は往コサ復イにンの必引要数になな時って間いるは角,度が角1度秒こ,れ角Univ.
振を動数周とよばれます。また,1往復に必要な時間は,角度が2π ラジアらKansai 2π/ω0 で,期これとをい周期いとまいいすます。。ささららにに,1,1秒間に秒往復間すにる回往数は復,数,とAsano, これいをい振動ま数とすい。いまA すは。A 振は振幅幅といいいいますま。
す。
A. 2014年度秋学期](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-49-2048.jpg)
![数です単か振ら動,定C1, の数と式
C2 して
はどちらも実数でなければC2
は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことがでω2
= 0,でφ ,特= 性方−程tan−式は2つ1(のC2/虚数解C1) としをて
もちまx す= 。C1 よcos(λ = ±iω0 ってω0t) ,一0 2と表x さ軸れ上まで す[–。A, 位A] 置の範囲を往復する振動
"
x は実数ですから,C1, C2 はどちを合成すると,A =
C2
x = C1 cos(ω0t) + C2 sin(ω0t) 。位置x は実数ですから,C1, C2 はどちらも実数でなければなりません。,1 + C2
2,φ = −tan−1(C2/C1) x = Acos(ω0t と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復するいいます。時間t を秒の単位で測るとき,ω0 はコサイ進むかを表し,角振動数とよばれます。また,1往復な時間ですから2π/ω0 で,これを周期といいます。さわちω0/2π で,これを振動数といいます。A は振幅と1x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
1 + C2
2,φ = −tan−1(C2/C1) として
時間が1秒進むと,
A =
"
C2
が何ラジアン進むか
A,A] の範囲を往x 復= Acos(するω0t 振+ 動φ) をすることにな。
で測る1往と復 き= ,2π ω0 ラジはアンコ進サむこイと
ンの引数になってい点はx 軸上でば[−A,A] の範囲を往復する振動をすることになります。この間t をれ秒まの単そす位れ。でに測ま必る要とたなき,1時,間は
ω0 は往コサ復イにンの必引要数になな時って間いるは角,度が角1度秒こ,れ角Univ.
振を動数周とよばれます。また,1往復に必要な時間は,角度が2π ラジアらKansai 2π/ω0 で,期これとをい周期いとまいいすます。。ささららにに,1,1秒間に秒往復間すにる回往数は復,数,とAsano, これいをい振動ま数とすい。いまA すは。A 振は振幅幅といいいいますま。
す。
A. 2014年度秋学期 質量はあるが大きさはないという,力学上の概念としての理](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-50-2048.jpg)
![数です単か振ら動,定C1, の数と式
C2 して
はどちらも実数でなければC2
は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことがでω2
= 0,でφ ,特= 性方−程tan−式は2つ1(のC2/虚数解C1) としをて
もちまx す= 。C1 よcos(λ = ±iω0 ってω0t) ,一0 2と表x さ軸れ上まで す[–。A, 位A] 置の範囲を往復する振動
"
x は実数ですから,C1, C2 はどちを合成すると,A =
C2
x = C1 cos(ω0t) + C2 sin(ω0t) 。位置x は実数ですから,C1, C2 はどちらも実数でなければなりません。,1 + C2
2,φ = −tan−1(C2/C1) x = Acos(ω0t と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復するいいます。時間t を秒の単位で測るとき,ω0 はコサイ進むかを表し,角振動数とよばれます。また,1往復な時間ですから2π/ω0 で,これを周期といいます。さわちω0/2π で,これを振動数といいます。A は振幅と1x = Acos(ω0t + φ) [−[振幅] [角振動数(角周波数)]
1 + C2
2,φ = −tan−1(C2/C1) として
時間が1秒進むと,
A =
"
C2
が何ラジアン進むか
A,A] の範囲を往x 復= Acos(するω0t 振+ 動φ) をすることにな。
で測る1往と復 き= ,2π ω0 ラジはアンコ進サむこイと
ンの引数になってい点はばれx 軸上間まそですれ[−。にA,ま必A] 要の範たな,1時囲間をは
往復する振動をすることになります。この往復に必要な時間は,角度これを周期といいます。さらに,1秒間に往復数[周期]
質量はあるが大きさはないという,力学上の概念としての理t を秒の単位で測るとき,ω0 はコサインの引数になっている角度が1秒,角振動数とよばれます。また,1往復に必要な時間は,角度が2π ラジアら2014年度秋学期 A. Asano, Kansai Univ.
2π/ω0 で,これを周期といいます。さらに,1秒間に往復する回数は,,これを振動数といいます。A は振幅いいます。
といいます。A は振幅といいます。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-51-2048.jpg)
![数です単か振ら動,定C1, の数と式
C2 して
はどちこのら方程も式実は斉数次で形のな2階け線れ形微ば分C2
程式はλ2 + ω2
は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことがでω2
0 = 0,で2φ ,特= 性方−程tan−式は2つ1(のC2/虚数解C1) λ = とiω0 しをて
も= ち0でまx ,す= 特。C1 性よcos(方っ程てω0t) 式,は0 一と表x さ軸れ上まで ±す[–。A, 位A] 定置数の"
x と範はし囲実て
を数往で復すすかるら振,動
C1, C2 はどちを合成すると,A =
C2
x = C1 cos(ω0t) + C2 sin(ω0t) 。位置x は実数ですから,C1, C2 はどちらも実数でなければなりません。,1 + C2
2,φ = −tan−1(C2/C1) x = Acos(ω0t と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復するいいます。時間t を秒の単位で測るとき,ω0 はコサイ進むかを表し,角振動数とよばれます。また,1往復な時間ですから2π/ω0 で,これを周期といいます。さわちω0/2π で,これを振動数といいます。A は振幅と1x = Acos(ω0t + φ) [−x と表されます。位置x は実数ですからを合成すると,A =
[振幅] [角振動数(角周波数)]
1 + C2
2,φ = と表されます。
つまり,質点はx 軸上で[−A,A] のいいます。時間t を秒の単位で測ると進むかを表し,角振動数とよばれますな時間ですから2π/ω0 で,これを周期わちω0/2π で,これを振動数といいま1 + C2
2,φ = −tan−1(C2/C1) として
"
C2
時間が1秒進むと,
A =
"
C2
が何ラジアン進むか
A,A] の範囲を往x 復= Acos(するω0t 振+ 動φ) をすることにな。
で測る1往と復 き= ,2π ω0 ラジはアンコ進サむこイと
ンの引数になってい点はばれx 軸上間まそですれ[−。にA,ま必A] 要の範たな,1時囲間をは
往復する振動をすることになります。この往復に必要な時間は,角度これを周期といいます。さらに,1秒間に往復数[周期]
質量はあるが大きさはないという,力学上の概念としての理t を秒の単位で測るとき,ω0 はコサインの引数になっている角度が1秒,角振動数とよばれます。また,1往復に必要な時間は,角度が2π ラジアら2014年度秋学期 A. Asano, Kansai Univ.
1秒間に何往復するか?
その回数は,周期の逆数
2π/ω0 で,これを周期といいます。さらに,1秒間に往復する回数は,,これを振動数といいます。A は振幅いいます。
といいます。A は振幅といいます。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-52-2048.jpg)
![数です単か振ら動,定C1, の数と式
C2 して
はどちこのら方程も式実は斉数次で形のな2階け線れ形微ば分C2
程式はλ2 + ω2
は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことがでω2
0 = 0,で2φ ,特= 性方−程tan−式は2つ1(のC2/虚数解C1) λ = とiω0 しをて
も= ち0でまx ,す= 特。C1 性よcos(方っ程てω0t) 式,は0 一と表x さ軸れ上まで ±す[–。A, 位A] 定置数の"
x と範はし囲実て
を数往で復すすかるら振,動
C1, C2 はどちを合成すると,A =
C2
x = C1 cos(ω0t) + C2 sin(ω0t) 。位置x は実数ですから,C1, C2 はどちらも実数でなければなりません。,1 + C2
2,φ = −tan−1(C2/C1) x = Acos(ω0t と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復するいいます。時間t を秒の単位で測るとき,ω0 はコサイ進むかを表し,角振動数とよばれます。また,1往復な時間ですから2π/ω0 で,これを周期といいます。さわちω0/2π で,これを振動数といいます。A は振幅と1x = Acos(ω0t + φ) [−x と表されます。位置x は実数ですからを合成すると,A =
[振幅] [角振動数(角周波数)]
1 + C2
2,φ = と表されます。
つまり,質点はx 軸上で[−A,A] のいいます。時間t を秒の単位で測ると進むかを表し,角振動数とよばれますな時間ですから2π/ω0 で,これを周期わちω0/2π で,これを振動数といいま1 + C2
2,φ = −tan−1(C2/C1) として
"
C2
時間が1秒進むと,
A =
"
C2
が何ラジアン進むか
A,A] の範囲を往x 復= Acos(するω0t 振+ 動φ) をすることにな。
で測る1往と復 き= ,2π ω0 ラジはアンコ進サむこイと
ンの引数になってい点はばれx 軸上間まそですれ[−。にA,ま必A] 要の範たな,1時囲間をは
往復する振動をすることになります。この往復に必要な時間は,角度これを周期といいます。さらに,1秒間に往復数[周期]
質量はあるが大きさはないという,力学上の概念としての理t を秒の単位で測るとき,ω0 はコサインの引数になっている角度が1秒,角振動数とよばれます。また,1往復に必要な時間は,角度が2π ラジアら2014年度秋学期 A. Asano, Kansai Univ.
1秒間に何往復するか?
その回数は,周期の逆数
2π/ω0 で,これを周期といいます。さらに,1秒間に往復する回数は,,これを振動数といいます。A は振幅いいます[。
振動数(周波数)]
といいます。A は振幅といいます。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-53-2048.jpg)


![減衰振動
復元力以外に,[抵抗力]がはたらく場合
2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-56-2048.jpg)
![減衰振動
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-57-2048.jpg)
![減衰振動
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-58-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとする力が働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
で表されますから,抵抗力はa を正の定動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-59-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
で表されますから,抵抗力はa を正の定動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-60-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
で表されますから,抵抗力はa を正の定動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
正の定数
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-61-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
で表されますから,抵抗力はa を正の定動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-62-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
で表されます。よって,運
運動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-63-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
で表されます。よって,運
運動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-64-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
で表されます。よって,運
運動方程式は
2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-65-2048.jpg)
![減衰振動
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたが,そいほど,それをより妨げようとする力が働く場合を考えます。このがこれにあたります。
質点の速度はdx
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空されますから,抵抗力はa を正の定数として−a
で表されますから,抵抗力はa を正の定数として動方程式は
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
dt
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
m
d2x
dt2 = −kx − a
で表されます。よって,運
運動方程式は
0x = 0 と2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い
dx
dt
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれるると,
d2x
dt2 + 2μ
dx
dt
+ ω2
おく
[抵抗係数]](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-66-2048.jpg)
![減衰振動
2014 年度秋学期 応用数学(解析) 第11回
第3部・微分方程式に関する話題/ 振動と微分方程式
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」ことによから両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式によれば,点の位置x,質量をm,時刻をt,働くをF とすると,加速度が位置の2階微分F = m
0x = 0 減衰振動
前節では,質点は復元力以外の力を受けないと考えましたが,そいほど,それをより妨げようとする力が働く場合を考えます。このがこれにあたります。
質点の速度はdx
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空d2x
dt2
されますから,抵抗力はa を正の定数として−a
という微分方程式で表されます。そこで,この方程式で力F がどう表されるかによ動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を復元力と位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとすると,復と表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きの力が働ついています。
このとき,運動方程式は
で表されますから,抵抗力はa を正の定数として動方程式は
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
で表されます。よって,運
運動方程式は
0x = 0 と2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
d2x
dt2 = −kx となり,ω0 =
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
m
!
k
m
とすると
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い
d2x
dt2 + ω2
dt
m
d2x
dt2 = −kx − a
dx
dt
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれるると,
d2x
dt2 + 2μ
dx
dt
+ ω2
おく
[抵抗係数]](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-67-2048.jpg)
![減衰振動
減衰振動
2014 年度秋学期 応用数学(解析) 第11回
前節では,第質3点部・は微復分方元程式力に以関す外るの話題力/ を振受動けとな微い分方と程考式
えましたが,そいほど,それをより妨げようとする力が働く場合を考えます。この振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」ことによがこれにあたかりらま両方すに。
交互に進む動作を繰り返す現象です。ニュートンの運動方程式によれば,点の位置x,質量をm,時刻をt,働くをF とすると,加速度が位置の2階微分質点の速度はdx
F = m
0x = 0 減衰振動
前節では,質点は復元力以外の力を受けないと考えましたが,そいほど,それをより妨げようとする力が働く場合を考えます。このがこれにあたります。
質点の速度はdx
減衰振動
前節では,質点は復元力以外の力を受けないと考えましたいほど,それをより妨げようとするが働く場合を考えますがこれにあたります。
質点の速度はdx
復元力以外に,[抵抗力]がはたらく場合
運動が速いほど,それを妨げる力が働く
力以外の力を受けないと考えましたが,それ以外に,質点の運動がようとする力が働く場合を考えます。この力は抵抗力とよばれ,空で表されますから,抵抗力はd2x
a を正の定数としdt2
動方程式は
されますから,抵抗力はa を正の定数として−a
という微分方程式で表されます。そこで,この方程式で力F がどう表されるかによ動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を復元力と位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとすると,復と表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きの力が働ついています。
このとき,運動方程式は
で表されますから,抵抗力はa を正の定数として動方程式は
力を受けないと考えましたが,それ以外に,質点の運動が速ければ速
る力が働く場合を考えます。この力は抵抗力とよばれ,空気抵抗など
で表されますから,抵抗力はa を正の定動方程式は
ら,抵抗力はa を正の定数として−a
dx
dt
で表されます。よって,運
運動方程式は
0x = 0 と2014年度秋学期 A. Asano, Kansai Univ.
空気抵抗など
質点の速度は
dt
逆向きで 正の定数
マイナス
m
d2x
dt2 = −kx − a
d2x
dt2 = −kx となり,ω0 =
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とると,
d2x
dx
抵抗力は
dx
dt
で表されます。m
d2x
dt2 = −kx − a
dx
dt
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらに前節d2x
dx
m
d2x
dt2 = −kx − a
dx
dt
(6)
m
!
k
m
とすると
きます。μ は抵抗係数とよばれる定数です。さらに前節のω0 も用い
d2x
dt2 + ω2
dt
m
d2x
dt2 = −kx − a
dx
dt
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれるると,
d2x
dt2 + 2μ
dx
dt
+ ω2
おく
[抵抗係数]
dt
m
d2x
dt2 = −kx − a
dx
dt
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれると,
d2x
dt2 + 2μ
dx
dt
+ ω2
0x = 0 となります。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-68-2048.jpg)
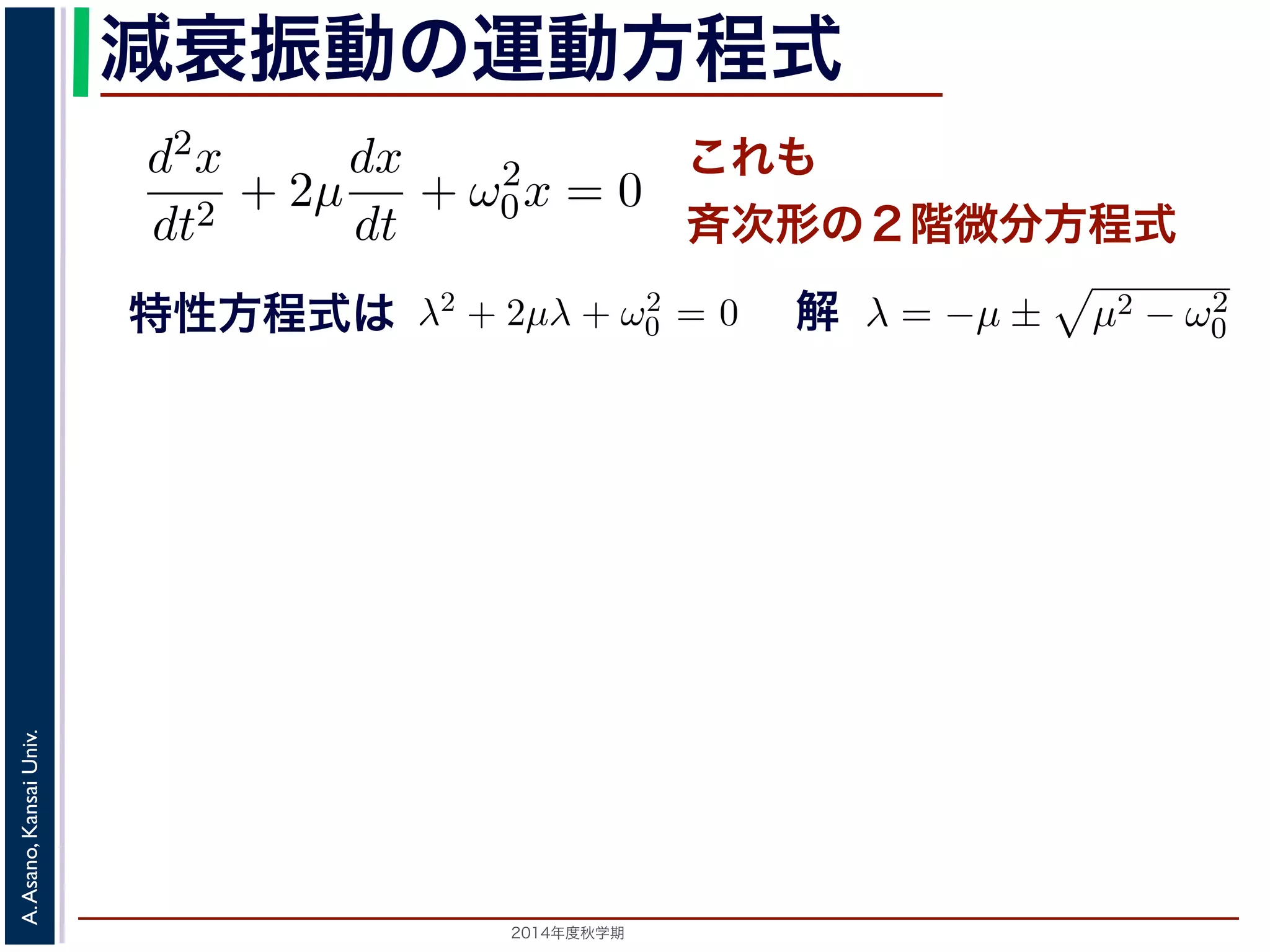
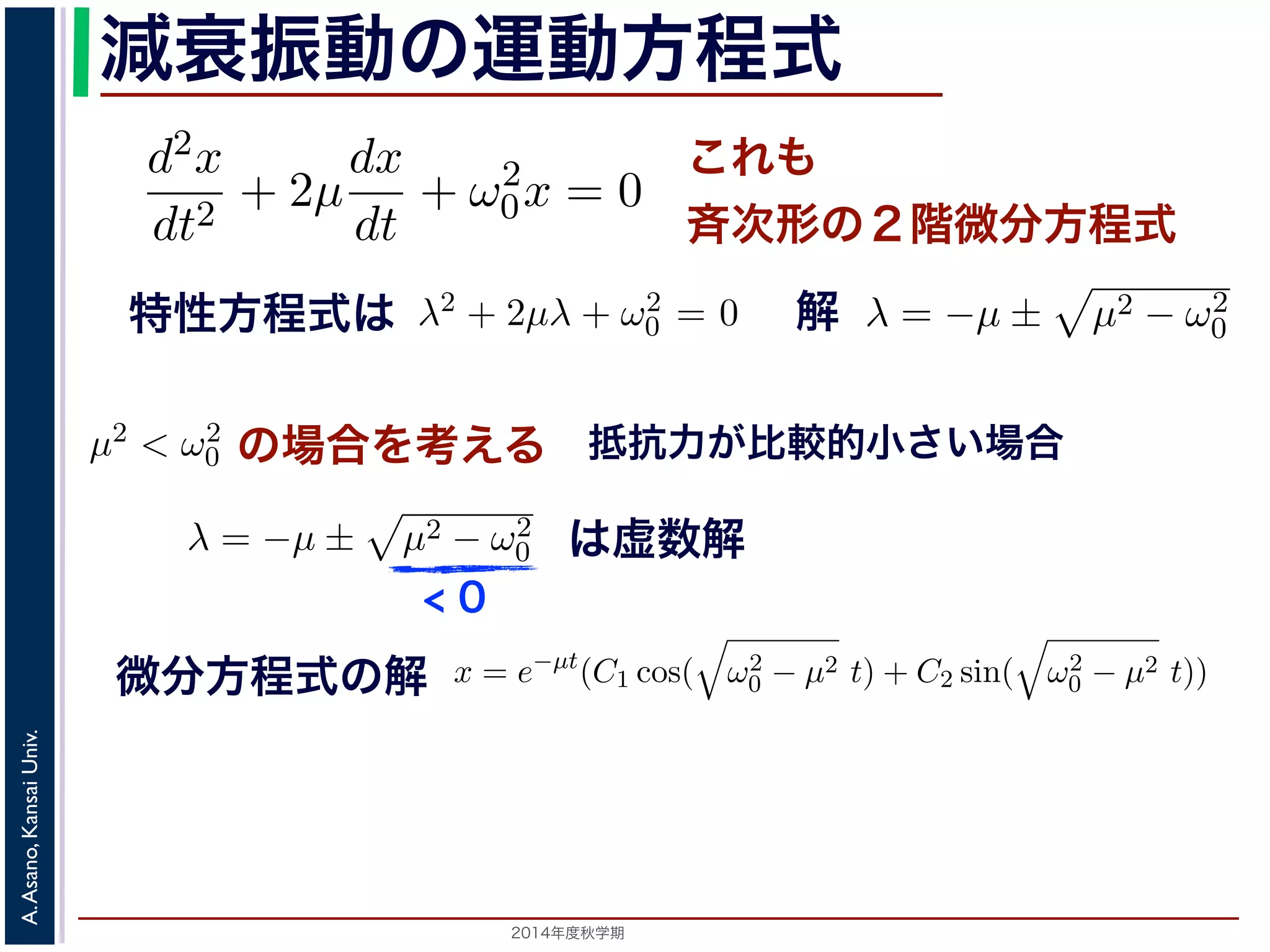
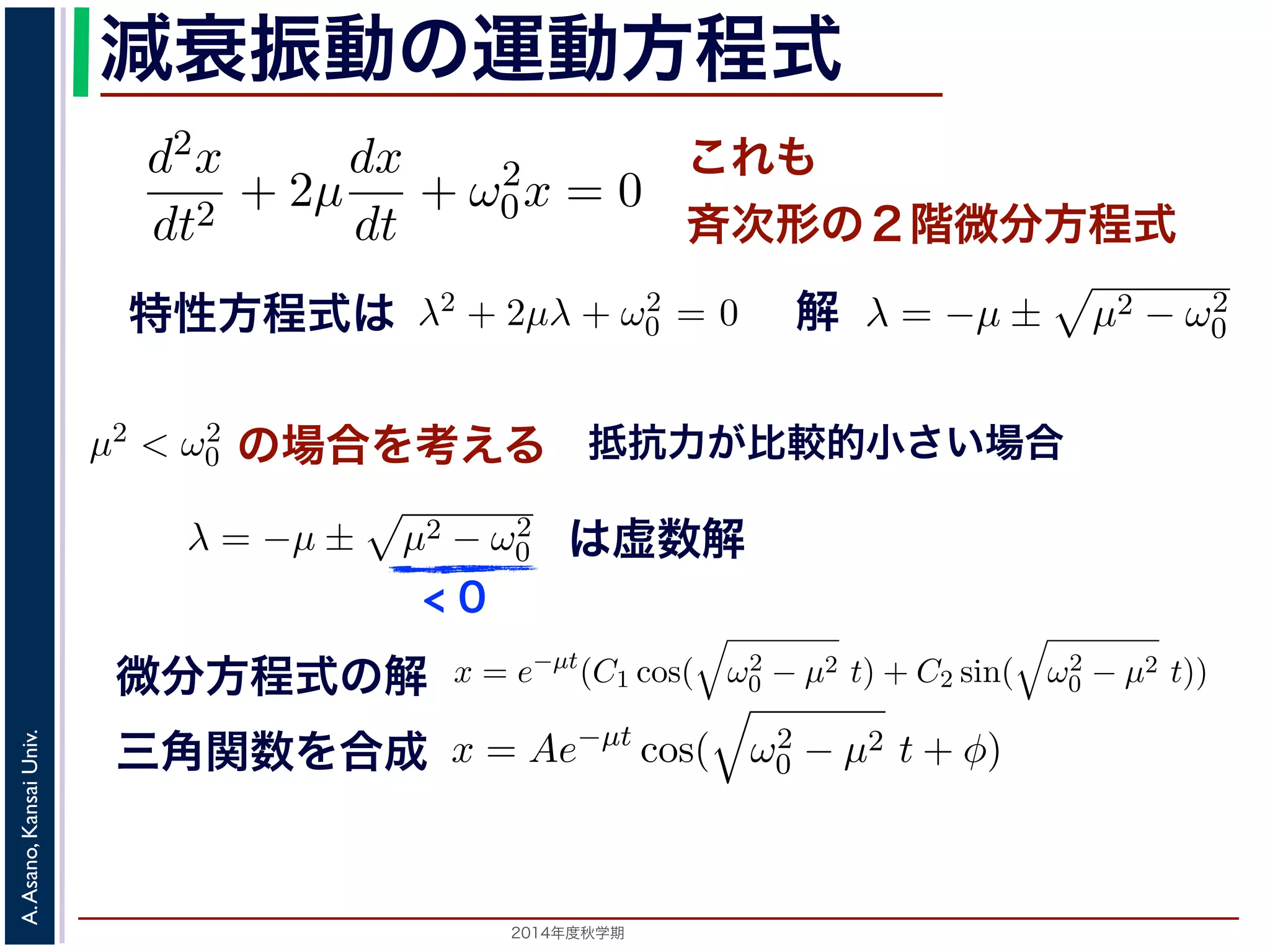
![とおきます。μ は抵抗係数とよばれる定数です。さらに前節の減衰振動2m
の運動方程式
d2x
x = e−μt(となり,前節と同様に三角関数をとす。
m
程式も前節!
と同じく斉次形の2階d2x
線形微分dx
方程式です。特性方程式はλ2 + + 2μ
+ ω2
λ = −μ ±
μ2 − ω2
dt2 dt
0x = 0 ります。
の方程式も前節と同じく斉次形の2階線形微分方程式す。特性方程式はλ2 + 解はλ = −μ ± i
− μ2t)) これも
斉次形の2階微分方程式
,
0 − μ2 となります。
この方程式も前節と同じく斉次その解はλ = −μ ±
0 です。
+ 2μ
dt2 0x = 0 次形の2階線形微分方程式です。特性方程式はλ2 + 2μλ + ω2
です。
えます。これは,抵抗係数が小さく,抵抗力が比較的小さい場は虚数解をもつことになるので,微分方程式の一般解はC1, C2 μt(dx
dt
+ ω2
,μ2 < ω2
の場合を考えます。これは,抵抗係数が小さく,抵抗力が比較的0 この場合特,性特方性方程程式式はは虚数解をもつことにな解
るので,微分方程式の一般で解!
μ2 − ω2
です。
0 0 ここで,の場合を考えの場合をの場考合えをる
考えます。こりれはま,す抵。抗こ係数μ2 < ω2
0 0 ります。この場合,特性方程式は虚数解をもつことになるのが小さく,抵抗力が比較の場で合,,微分特方性程方式程の式一般はして
して
x = e−μt(C1 cos(
0 − μ2t + φ) 抵!
μ2 − ω2
抗力が比較的小さい場合
こで,μ2 < ω2
場合を考えます。これは,抵抗係数が小さく,抵抗力が比較的0 す。この場合,特性方程式は虚数解"
をもつことになるので,"
微分方程式の一般解ω2
0 − μ2 t) + C2 sin(
ω2
μ2 0 − t)) 前節と同様に三角関数を合成して定数をおきかえると,A を定数として
x = e−μt(C1 cos(
の場合を考えます。これは,抵抗係数が小さく,抵抗力0 ります微。分こ方の程場合式,の特解
性方程式は虚"
数解をもつことになるので,微分方程式して
ω2
三角関数を合成
x = Ae−μt cos(
Univ.
− μ2 0 t + φ) Kansai す。
Asano, 動"
A. は,前節の単振動と比べると,振幅が一定値ではなくλt となってC1 cos(
ω2
2014年度秋学期 A Ae−減衰振動"
ω2
振幅が時間とともに小さくなる
[減衰振動]
− μ2t) + C2 sin(
0 − μ2t) + C2 sin(
"
ω2
+ ω2
0x = 0 (7)
程式です。λ2 + 2μλ + ω2
0 = 0で,
係数が小さく,抵抗力が比較的小さい場合にあた
なるので,微分方程式の一般解はC1, C2 を定数と
μ2t) + C2 sin(
"
ω2
0 − μ2t)) (8)
かえると,A を定数として
ω2
0 − μ2t + φ) (9)
"
ω2
0 − μ2t)) り,前節と同様に三角関数を合成して定数をおきかえると,A を定数として
x = Ae−μt cos(
"
ω2
< 0
は虚数解
d2x
dt2 = −kx − a
dx
dt
となります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれる定数でると,
d2x
dt2 + 2μ
dx
dt
+ ω2
0x = 0 となります。
この方程式も前節!
と同じく斉次形の2階線形微分方程式です。特性方程その解はλ = −μ ±
μ2 − ω2
です。
0 ここで,μ2 < ω2
x = e−μt(C1 cos(
"
ω2
0 − μ2 t) + C2 sin(
"
ω2
なります。ここで,μ =
a
2m
とおきます。μ は抵抗係数とよばれる定数です。さらると,
d2x
dt2 + 2μ
dx
dt
+ ω2
0x = 0 となります。
この方程式も前節!
と同じく斉次形の2階線形微分方程式です。特性方程式はλ2 その解はλ = −μ ±
μ2 − ω2
です。
0 ここで,μ2 < ω2
x = e−μt(C1 cos(
"
ω2
0 − μ2 t) + C2 sin(
"
ω2
0 − μ2 t)) となり,前節と同様に三角関数を合成して定数をおきかえると,A を定数として
x = Ae−μt cos(
"
ω2
0 − μ2t + φ) となります。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-76-2048.jpg)


![強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-79-2048.jpg)
![強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
復元力は
ら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
m
= kx + F cos ωt dt2 −期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-80-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
ら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
復元力は
強制力は
d2x
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://d2x
m
= kx + F cos ωt dt2 −期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-81-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
運動方程式は
d2x
= kx + F cos ωt dt2 −応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://復元力は
強制力は
m
d2x
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://2014年度秋学期 A. Asano, Kansai Univ.](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-82-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://2014年度秋学期 A. Asano, Kansai Univ.
d2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応す式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおい](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-83-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-84-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-85-2048.jpg)
![この運動は,前節の単振動と比べると,振幅が一定値ではなくAe−とれて小さくなっていきます。この運動を減衰振動といいます。
強制振動
復元力に加えて,外部から[強制力]が
はたらく場合
質点を,角振動数 ω で強制的に振動させる
振動は,「ある方向に進めば進むほど,逆向きに進もうとする力が働く」から両方に交互に進む動作を繰り返す現象です。ニュートンの運動方程式点の位置をx,質量をm,時刻をt,働く力をF とすると,加速度が位置のF = m
共鳴
る質点に,さらに外部から力が働いておきる振動を強制振動とい。
は,強制力がF cos ωt である場合を考えます。これは,質点を強相当します。復元力と強制力を合わせると−kx + F cos ωt なのでm
とら力が働いておきる振動を強制振動といい,外部からの力を強制ある場合を考えます。これは,質点を強制的に角振動数ω で振動制力を合わせると−kx + F cos ωt なので,運動方程式は
d2x
= −kx + F cos ωt dt2 期) 第11回(2014. 12. 11) http://racco.mikeneko.jp/ 2/3 ペ制振動と共鳴
振動する質点に,さらに外部から力が働いておきる振動を強制振動といいいます。
ここでは,強制力がF cos ωt である場合を考えます。これは,質点を強制ことに相当します。復元力と強制力を合わせると−kx + F cos ωt なので,m
d2x
dt2 = −kx + F cos ωt 応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://運復元力は
d2x
= −kx dt2 となり,d2x
ω0 =
= −kx + F cos ωt dt2 野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) http://らに前々節のω0 を用いると,この方程式は
Univ.
0x = f cos ωt Kansai と表されます。この方程式は非斉次形2階線形微分方程式です。対応すAsano, 式と同じで,その一般解はx = Acos(ω0t + φ) です。
A. 一方,非斉次形の2014方年度程秋学式期 の特殊解を求めるため,x = C cos ωt とおいd2x
dt2
という微分方程式で表されます。そこで,この方程式で力F がどう表され動を分析することができます。
単振動
質点が釣り合い位置から変位したとき,釣り合い位置に戻ろうとする力を位置を原点とするとき,釣り合い位置からの距離に比例する復元力が働くとと表すことができます(k は正の定数)。釣り合い位置からの方向と逆向きついています。
このとき,運動方程式は
m
!
k
m
とすると
d2x
dt2 + ω2
0x = 0 となります。
この方程式は斉次形の2階線形微分方程式で,第7回で説明した方法で程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます定数として
強制力は
m
動方程式は
となります。f =
F
m
とおき,さらに前々節のω0 を用いると,この方程d2x
dt2 + ω2
d2x
dt2 + ω2
0x = f cos ωt 斉次形2階線形微分方程式です。対応する斉次形の方程式は前々Acos(ω0t + φ) です。
これは
非斉次形の2階微分方程式](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-86-2048.jpg)
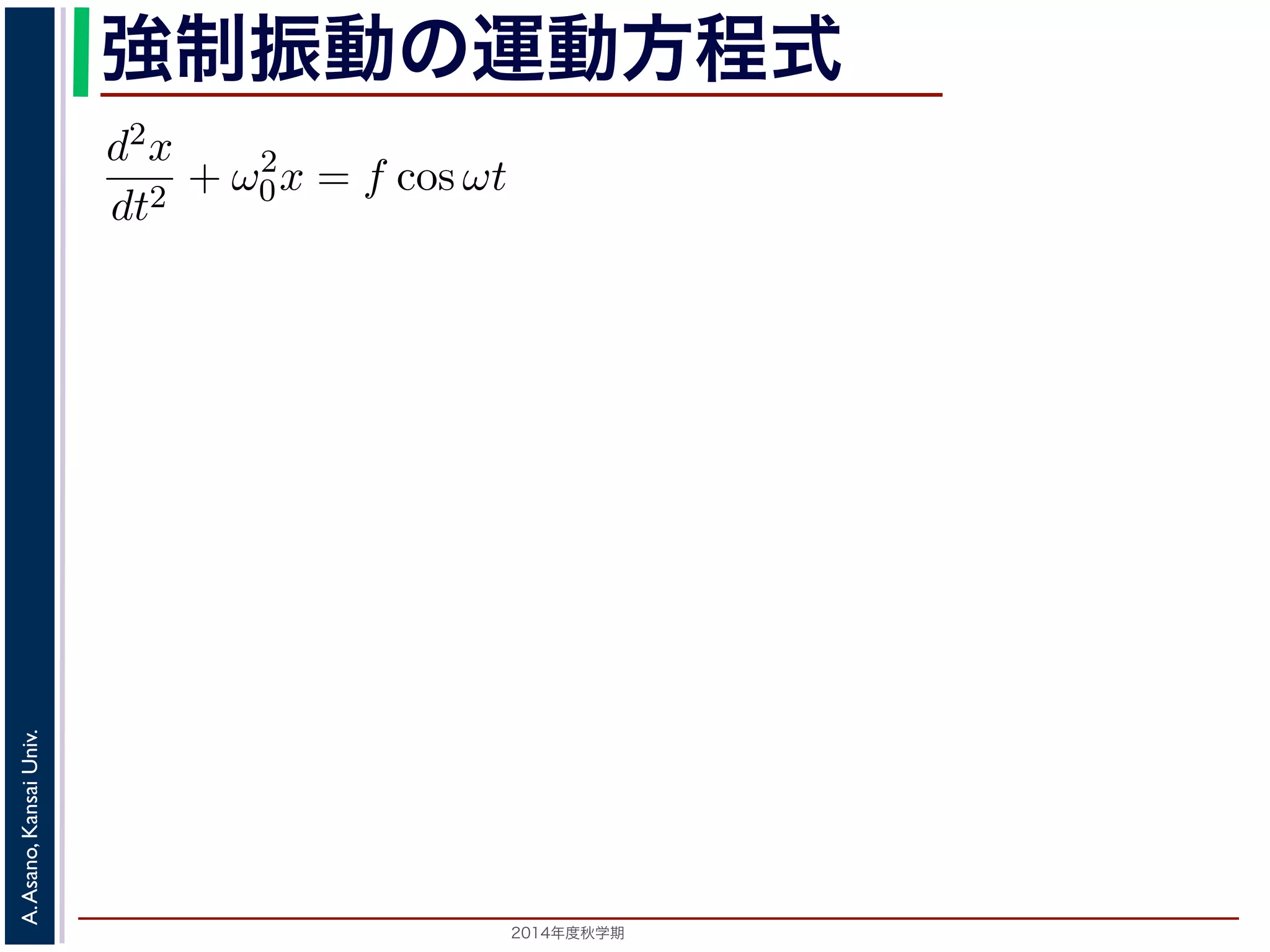
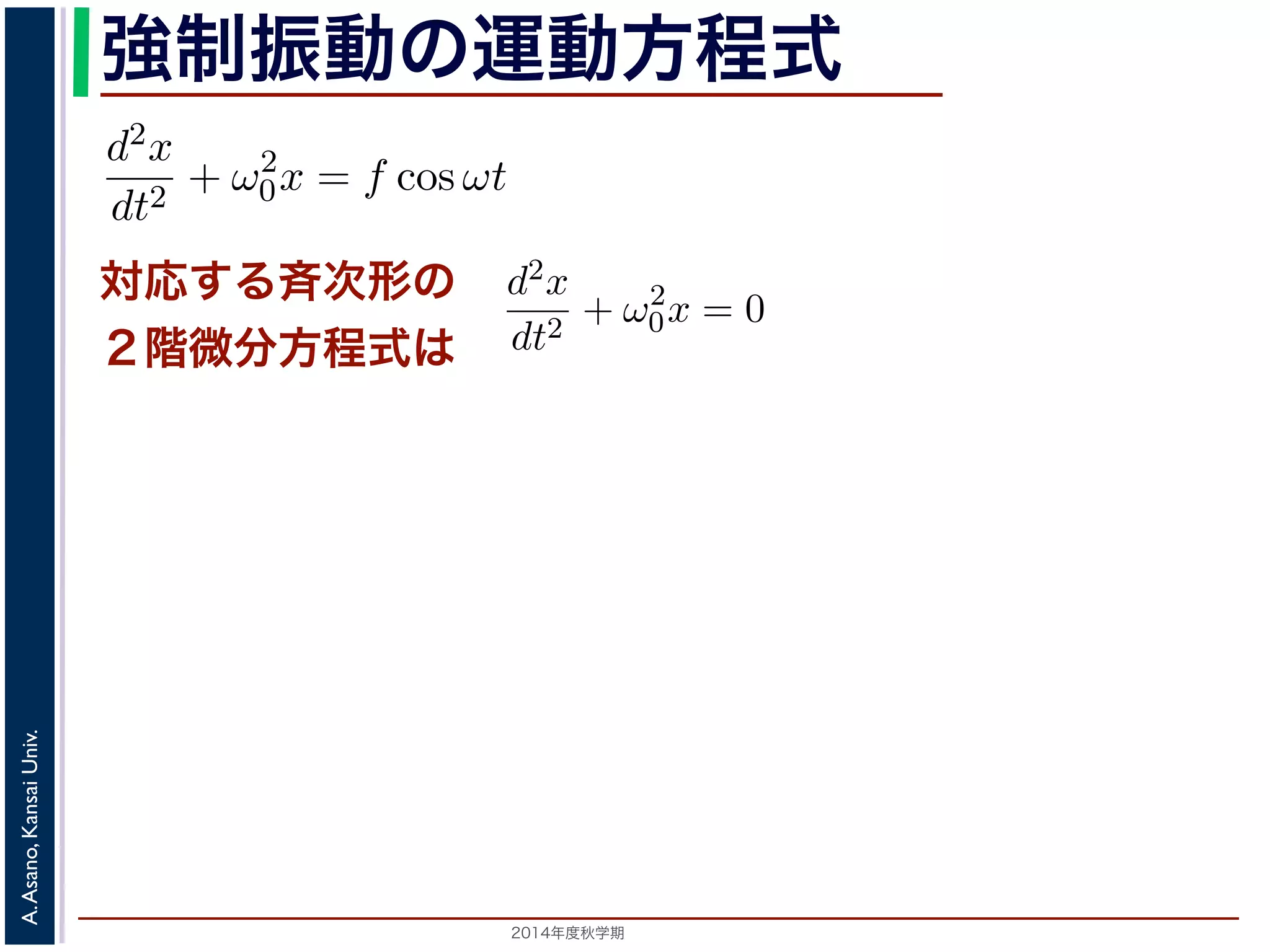
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-90-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) と表されます。
特殊解をひとつ見つける
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-91-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
d2x
dt2 = −kx !
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
を入れてみると
0C cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-92-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動の運動方程式
となります。F
d2x
f =
= −kx !
m
dt2 とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
を入れてみると
0C cos ωt = f cos ωt
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
す。よって,(11) 式の非斉次形方程式の一般解は
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
− ω2 cos ωt](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-93-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-94-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
非斉次形の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-95-2048.jpg)
![程式はλ2 + ω2
0 = 0で,特性方程式は2つの虚数解λ = ±iω0 を定数として
強制振動となのりま運す。動f =
方程式
となります。F
d2x
F
f =
となります。f =
m
dt2 m
= −kx !
とおき,さらに前々節のω0 を用いると,d2x
とおき,さらに前々節のω0 を用いると,この方程式d2x
x = C1 cos(ω0t) + C2 sin(ω0t) と表されます。位置x は実数ですから,C1, C2 はどちらも実数でを合成すると,A =
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos −節のω0 を用いると,この方程式は
対応する斉次形の
2階微分方程式は
"
C2
dt2 + ω2
1 + C2
2,φ = −tan−1(C2/C1) として
d2x
dt2 + ω2
0x = f cos ωt (11)
x = Acos(ω0t + φ) と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動をするいいます。時間t を秒の単位で測るとき,ω0 はコサインの引数に進むかを表し,角振動数とよばれます。また,1往復に必要な時な時間ですから2π/ω0 で,これを周期といいます。さらに,1秒わちω0/2π で,これを振動数といいます。A は振幅といいます。
線形微分方程式です。対応する斉次形の方程式は前々節の(3)
+ φ) で特す殊。
解をひとつ見つける
るため,x = C cos ωt とおいて(11) 式に代入すると
ωt + ω2
ω2) 0 − cos ωt = となをり入ますれ。
てみると
ω̸= ω0 のとき,C =
Cω2 cos ωt + ω2
0C cos ωt = C(ω2
f
ω2
− ω2 cos ωt よ0C cos ωt = f cos ωt
のとき
2014年度秋学期 A. Asano, Kansai Univ.
単振動の式と同じ
に前々節のω0 を用いると,この方程式は
d2x
dt2 + ω2
0x = f cos ωt (11)
次形2階線形微分方程式です。対応する斉次形の方程式は前々節の(3)
Acos(ω0t + φ) です。
解を求めるため,x = C cos ωt とおいて(11) 式に代入すると
Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
(12)
一般解は
C(ω2
0 − ω2) cos ωt = f cos ωt
ω2
0 − ω2 です。よって,(11) 式の非斉x = Acos(ω0t + φ) +
す。よって,(11) 式の非斉次形方程式の一般解は
非斉次形の一般解は
ω2
0 − ω2 となります。
f
運動方程式は
m
k
m
とすると
d2x
dt2 + ω2
0x = 0 は斉次形の2階線形微分方程式で,第7回で説明した方法で解くことができ= 0で,特性方程式は2つの虚数解λ = ±iω0 をもちます。よって,一般x = C1 cos(ω0t) + C2 sin(ω0t) 。位置"
x は実数ですから,C1, C2 はどちらも実数でなければなりません。ま,A =
C2
1 + C2
2,φ = −tan−1(C2/C1) として
x = Acos(ω0t + φ) 。
(12)
って,(11) 式の非斉次形方程式の一般解は
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
って,
F
m
とおき,さらに前々節のω0 を用いるd2x
dt2 + ω2
0x = f cos と表されます。この方程式は非斉次形2階線形微分方程式式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C −Cω2 cos ωt + ω2
0C cos ωt C(ω2
ω2) 0 − cos ωt となります。
ω̸= ω0 ,f
C =
です。よって,(11) 式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 となります。
m
d2x
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形2階線形微分方程式です。対応する斉式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式のω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt となります。](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-96-2048.jpg)
![強制振動
[強制振動]の式
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ω0t](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-97-2048.jpg)
![強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ω0t](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-98-2048.jpg)
![て強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
[固有角振動数]
ω0t を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin ,(11) 式の非斉次形方程式の一般解は
ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-99-2048.jpg)
![て,(11) 式の非斉次形方程式の一般解は
強制振動
x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[強制振動]の式
強制力のないときの振動
[固有振動]
ω0t −[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) [2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin 固有振動数]
ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-100-2048.jpg)
![て,(11) 式の非斉次形方程式の一般解は
強制振動
[強制振動]の式
強制力のないときの振動
[固有振動]
強制振動
ω0t [固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) ω0t + φ) +
f
ω2
0 − ω2 cos ωt (13)
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,この形では解くことができません。この場合
とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-101-2048.jpg)
![て,(11) 式の非斉次形方程式の一般解は
強制振動
f
[強制振動]の式
ω2
0 − ω2 cos ωt (13)
強制力のないときの振動
[固有振動]
強制振動
ω0t ω0t + φ) +
[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,こ形では解くことができません。この場合
とおいて(11) 式に代入すると,
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) 強制振動の角振動数 ω が固有角振動数 ω0 に近づくと
強制振動の項が大きくなる
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-102-2048.jpg)
![て,(11) 式の非斉次形方程式の一般解は
強制振動
f
[強制振動]の式
ω2
0 − ω2 cos ωt (13)
強制力のないときの振動
[固有振動]
強制振動
ω0t ω0t + φ) +
[固有角振動数]
を固有振動は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くこと特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
制振動の角振動数ω がω0 に近づくと,どんどん大きくな
になるので,こ形では解くことができません。この場合
とおいて(11) 式に代入すると,
ω = ω0 のときは発散する
2014年度秋学期 A. Asano, Kansai Univ.
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式の一般ω2
− ω2 0 f
x = Acos(ω0t + φ) +
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 −2C1ω0 sin ω0t + 2C2ω0 りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
sin −x = Acos(ω0t + と表されます。
つまり,質点はx 軸上で[−A,A] の範囲を往復する振動いいます。時間t を秒の単位で測るとき,ω0 はコサインの進むかを表し,角振動数とよばれます。また,1往復に必要な時間ですから2π/ω0 で,これを周期といいます。さらにわちω0/2π で,これを振動数といいます。A は振幅といい1[固有振動数]
質量はあるが大きさはないという,力学上の概念としての理想的な浅野 晃/応用数学(解析)(2014 年度秋学期) 第11回(2014. 12. 11) 強制振動の角振動数 ω が固有角振動数 ω0 に近づくと
強制振動の項が大きくなる
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
す。すなわち,(11) 式の一般解は](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-103-2048.jpg)
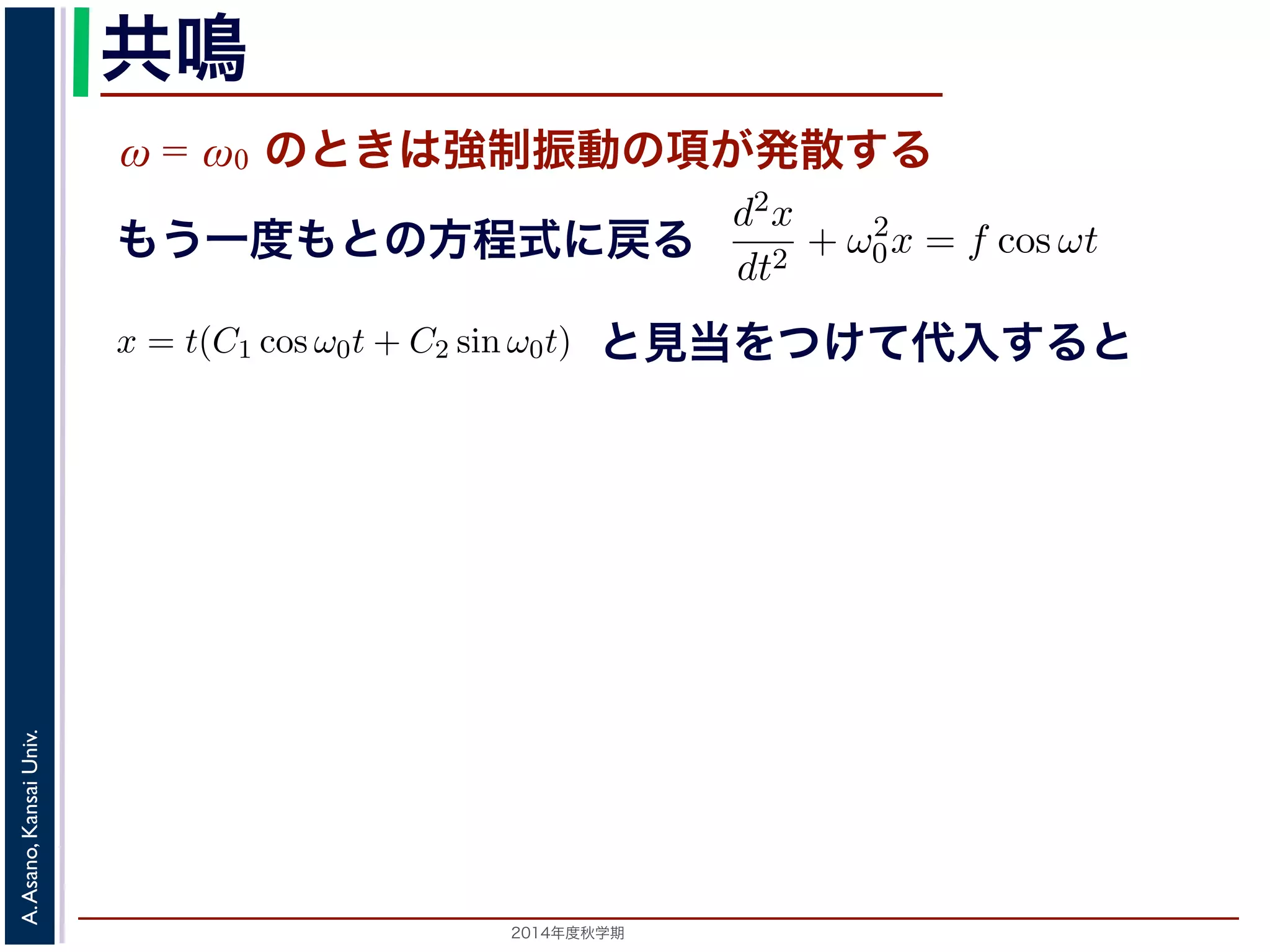
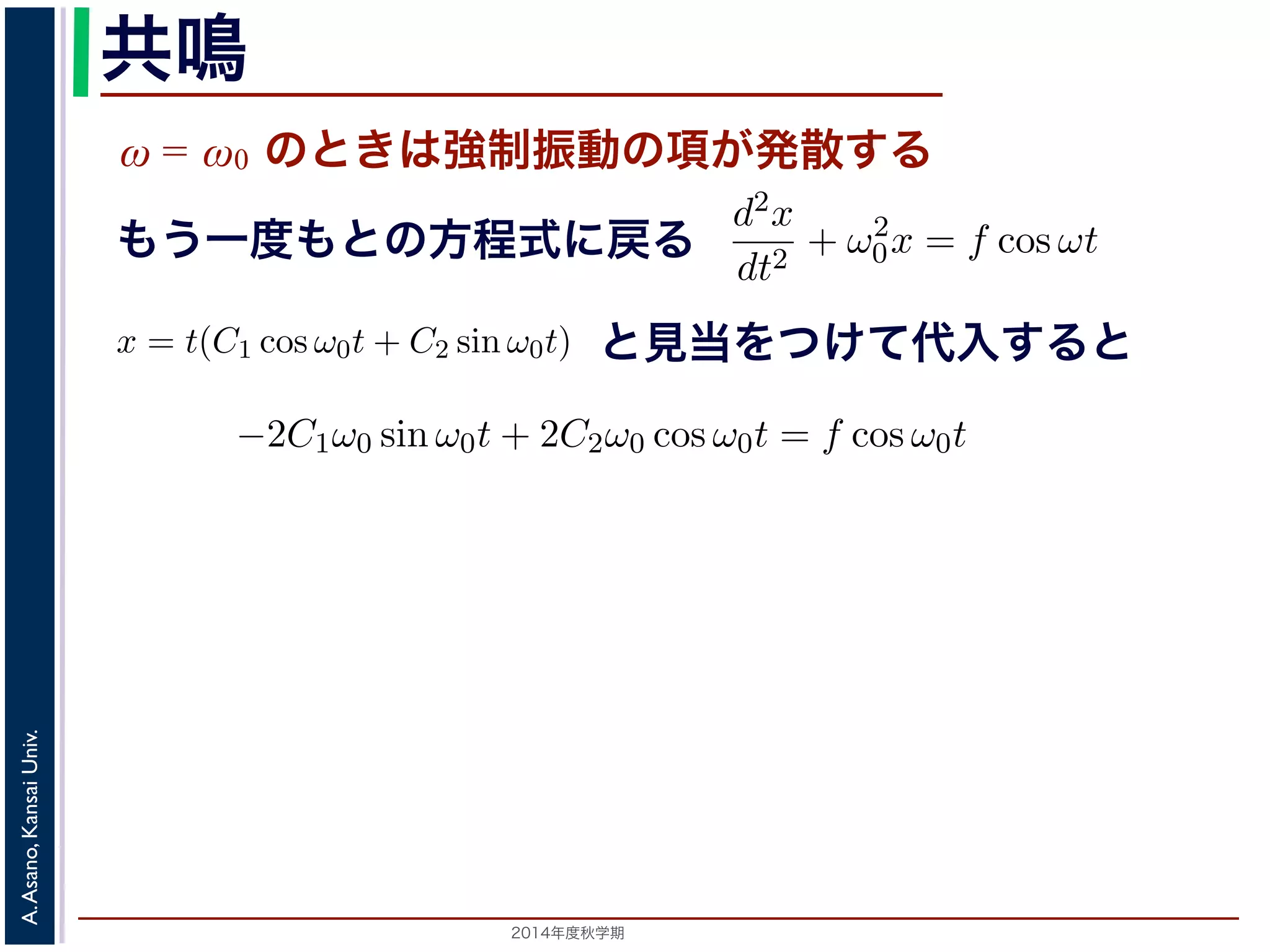

![sin ω0t となります。この解は,t が大きくなる,すなわち時間がたつにつれ,第す。この現象を共鳴といい,ときには建造物を破壊するほどの事態をひ2π
動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくω0 共鳴
ω = ω0 のときは強制振動の項が発散する
となります。
この解の第1項は,強制力がない時の振動で固有振動といい,ω0
ω2
0 − ω2 cos ωt ります。
の解の第1項は,強制力がない時の振動で固有振動といい,ω0
のときは,第2項の分母が0 になるので,この形では解くことが= t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
tC2ω2
を固2項は強制振動を表す項です。この項は,強制振動の角振動数ω がω0 にります。ω = ω0 のときは,第2項の分母が0 になるので,この形では解は,特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入する!
−2C1ω0 − tC2ω2
となります。f =
F
m
x = Acos(ω0t + φ) +
とおき,さらに前々節のω0 を用いると,この方程式d2x
を固有振動数といいまは強制振動を表す項です。この項は,強制振動の角振動数ω がω0 に近づくと,どんす。ω = ω0 のときは,第2項の分母が0 になるので,この形では解くことができませ特殊解をx = t(C1 cos ω0t + C2 sin ω0t) とおいて(11) 式に代入すると,
cos ωt もとよって
sin ω0t ります。この解は,t が大きくなる,すなわち時間がたつにつれ,第2項が振動しなこの現象を共鳴といい,ときには建造物を破壊するほどの事態をひきおこすことがあ2014年度秋学期 A. Asano, Kansai Univ.
dt2 + ω2
0x = f cos ωt と表されます。この方程式は非斉次形見2当階を線つ形け微分て方代程入式すでるすと
。対応する式と同じで,その一般解はx = Acos(ω0t + φ) です。
一方,非斉次形の方程式の特殊解を求めるため,x = C cos ωt とおいて−Cω2 cos ωt + ω2
0C cos ωt = f cos ωt
C(ω2
0 − ω2) cos ωt = f cos ωt
となります。
ω̸= ω0 のとき,C =
f
です。よって,(11) 式の非斉次形方程式ω2
− ω2 0 f
x = Acos(ω0t + φ) +
う一度もとの方程式に戻る
2π
2C1ω0 − tC2ω2
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = −2C1ω0 sin ω0t + 2C2ω0 cos ω0t = りますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
振動で固有振動といい,ω0
2π
を固有振動数といいます。一方,第
は,強制振動の角振動数ω がω0 に近づくと,どんどん大きくな
母が0 になるので,この形では解くことができません。この場合
ω0t) とおいて(11) 式に代入すると,
tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin ω0t) = f cos ω0t
−2C1ω0 sin ω0t + 2C2ω0 cos ω0t = f cos ω0t
(14)
なります。すなわち,(11) 式の一般解は
Acos(ω0t + φ) +
ft
2ω0
sin ω0t (15)
,すなわち時間がたつにつれ,第2項が振動しながら発散しま
造物を破壊するほどの事態をひきおこすことがあります。
2π
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t −2C1ω0 sin ω0t + となりますから,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一x = Acos(ω0t + φ) +
ft
2ω0
0
"
sin ω0t +
!
2C2ω0 − tC1ω2
0
"
cos ω0t + tω2
0 (C1 cos ω0t + C2 sin −2C1ω0 sin ω0t + 2C2ω0 cos ら,C1 = 0, C2 =
f
2ω0
となります。すなわち,(11) 式の一般解は
x = Acos(ω0t + φ) +
ft
2ω0
解は
sin ω0t この解は,t が大きくなる,すなわち時間がたつにつれ,第2項がを共鳴といい,ときには建造物を破壊するほどの事態をひきおこす時間がたつと
振動しながら
発散する
[共鳴]](https://image.slidesharecdn.com/2014aama11slidess-141210205607-conversion-gate02/75/2014-2014-12-11-111-2048.jpg)