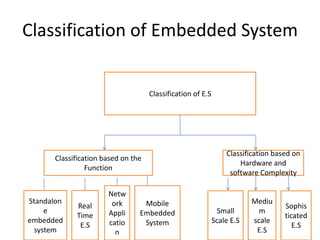
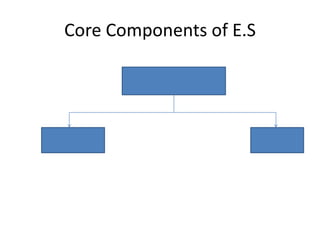
The document provides an introduction to embedded systems including definitions, explanations and comparisons to general purpose computer systems. It discusses the core components of embedded systems including hardware components like processors, memory and I/O as well as software components like operating systems and device drivers. It also covers various embedded system classifications, applications and communication interfaces.