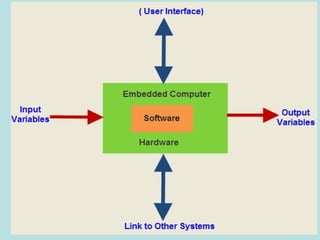
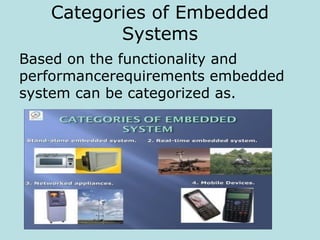
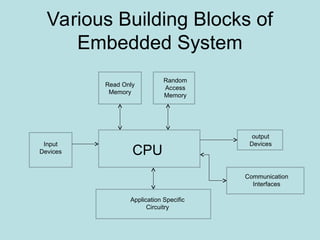
An embedded system combines hardware and software to perform a specific task within a device, utilizing elements like microcontrollers and sensors. These systems have unique characteristics such as limited resources, reliability, and time constraints, and they can be classified based on generation, complexity, and specific functionalities. Major applications include consumer electronics, healthcare, and industrial automation, showcasing their critical role in various technological domains.