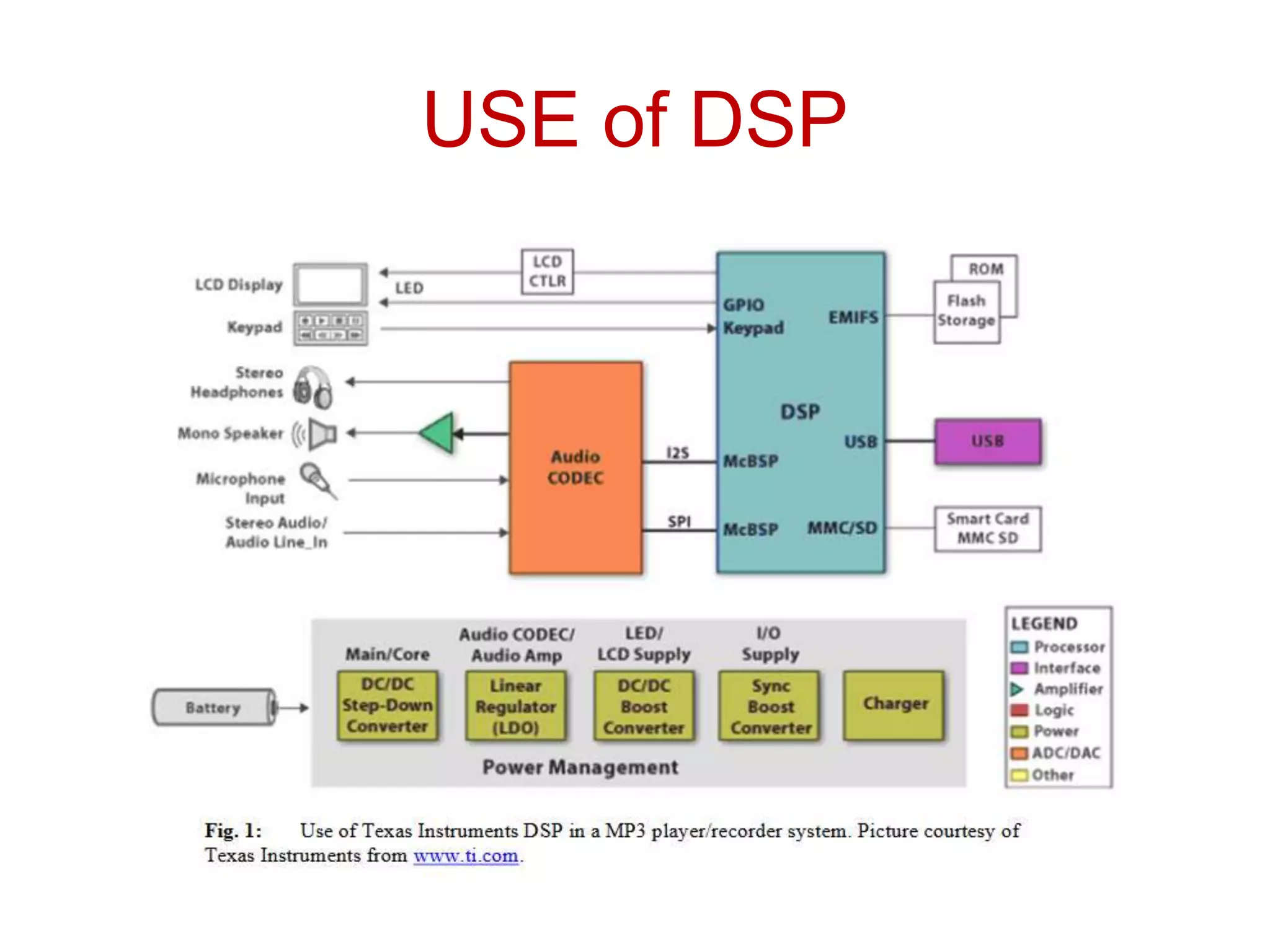
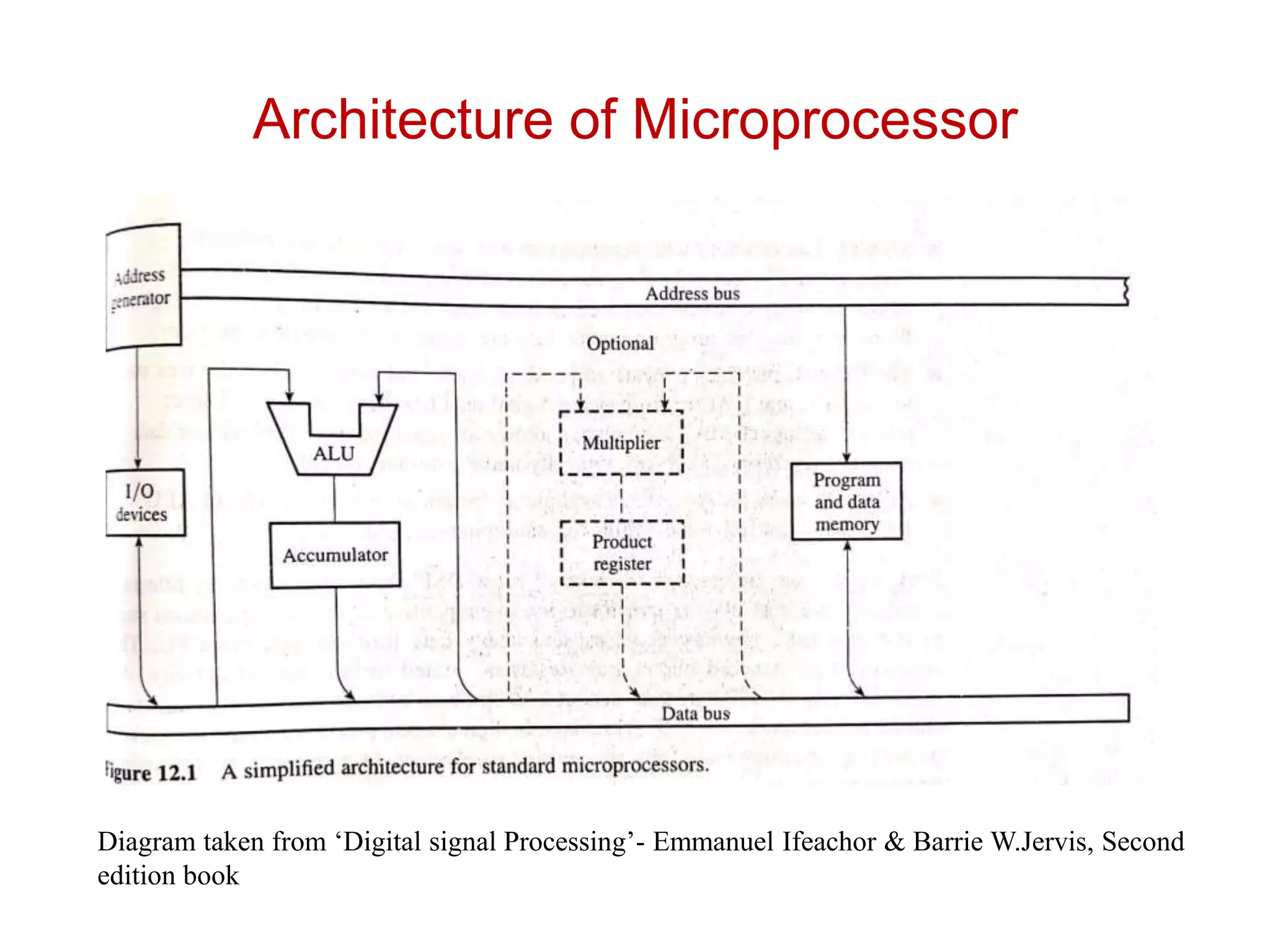
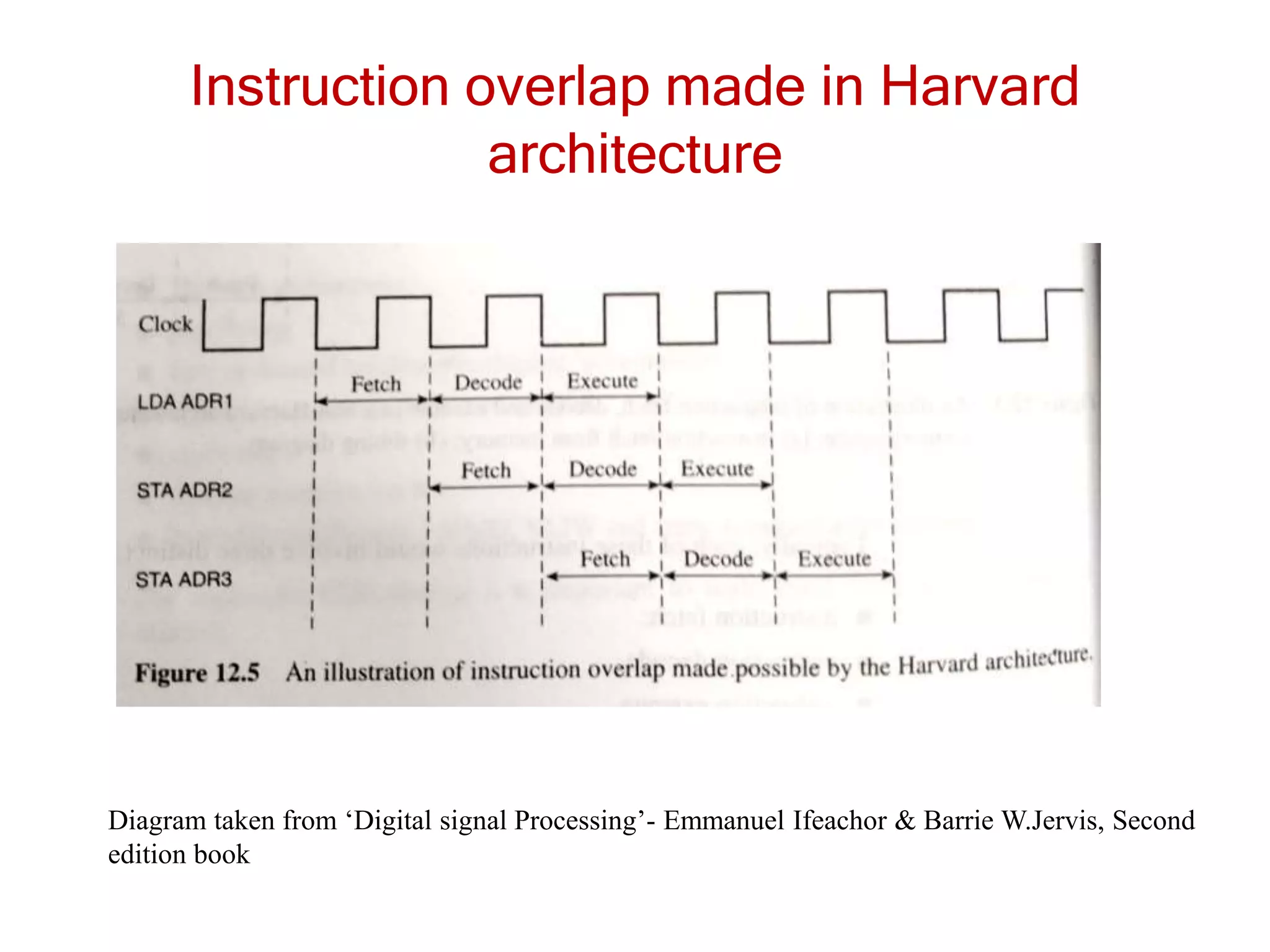
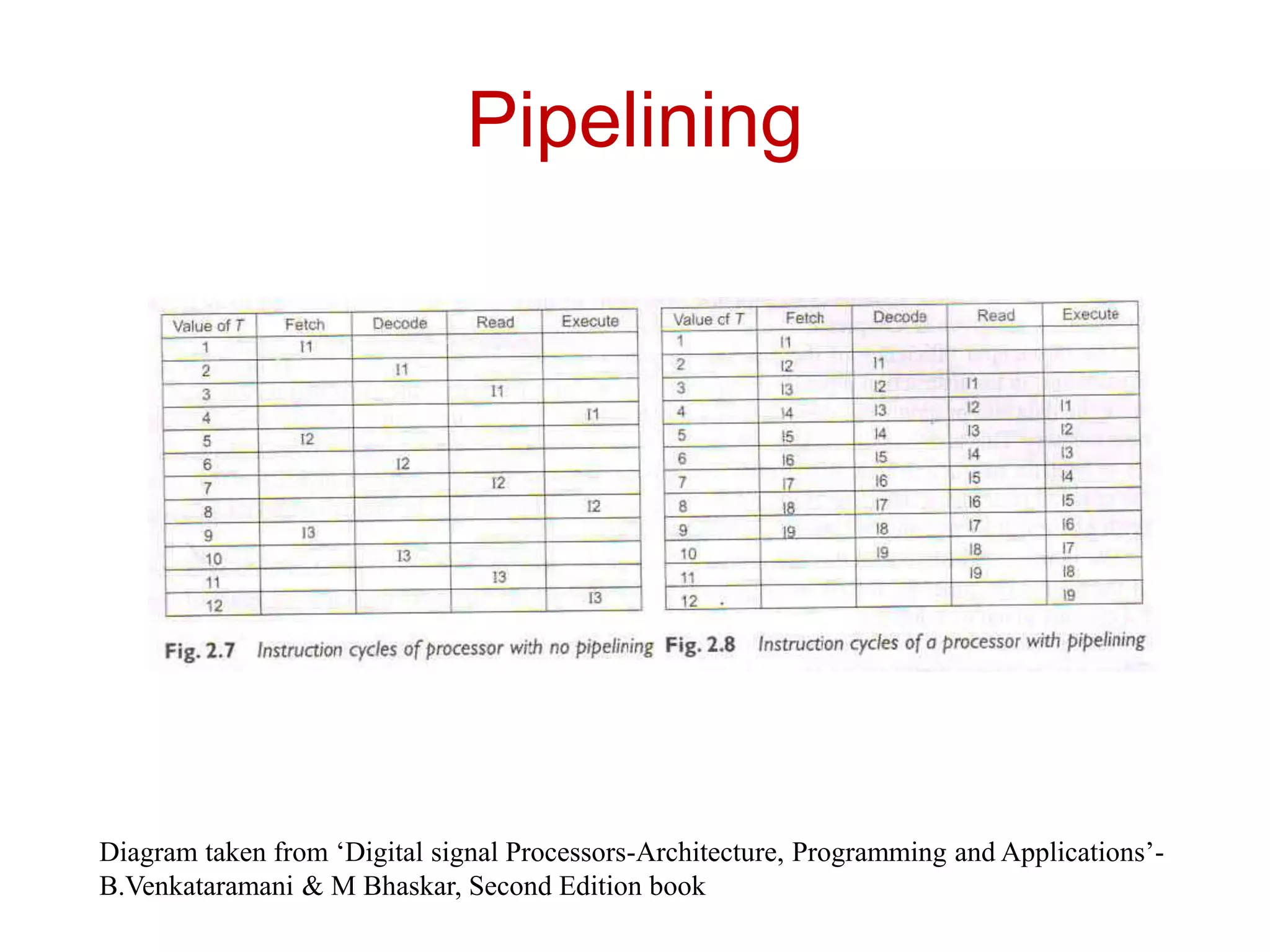
- Digital signal processors are specialized microprocessors targeted at digital signal processing applications that require real-time processing. They have hardware features like multipliers, modified bus structures, and pipelining that enable efficient DSP operations.
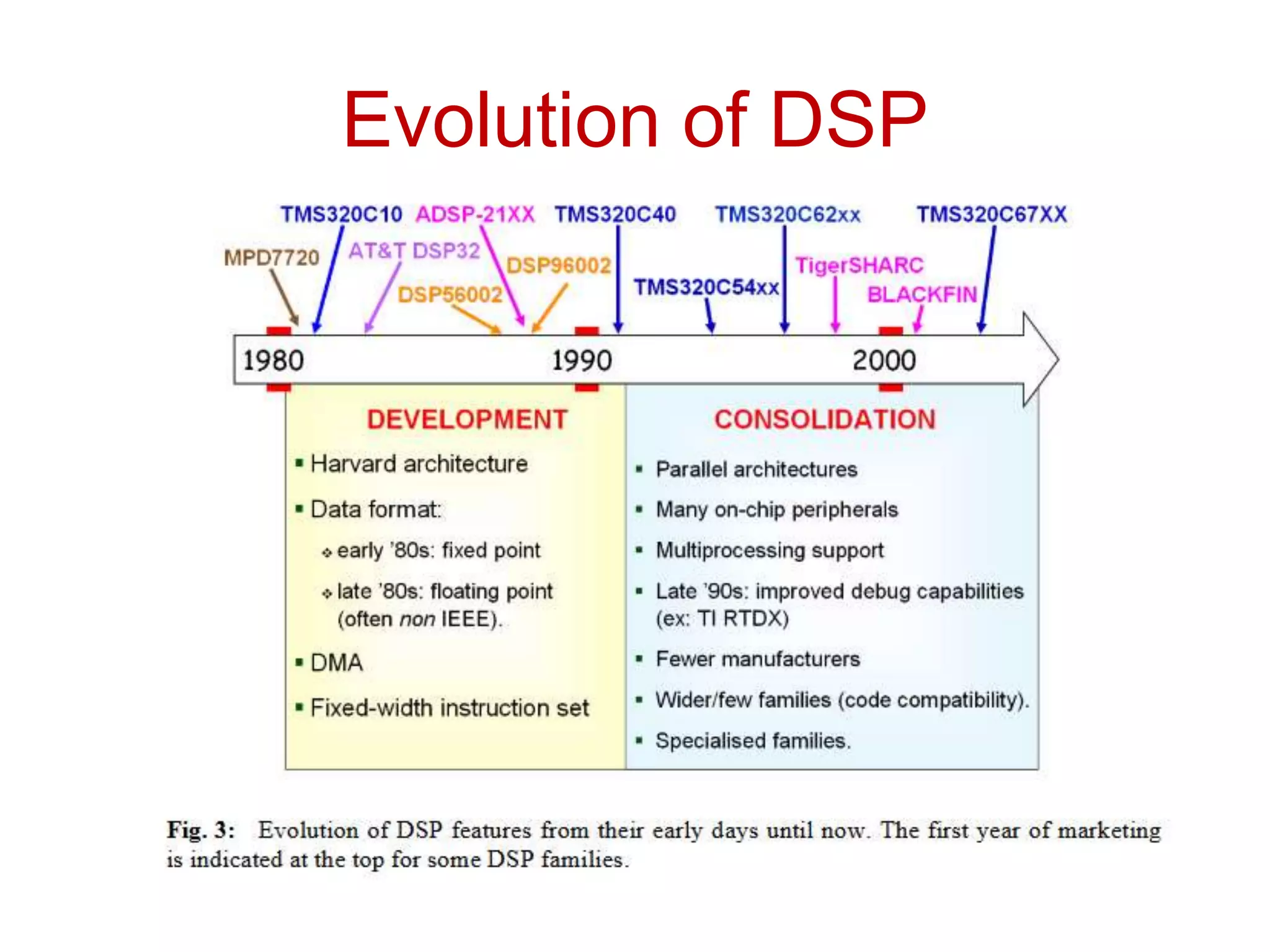
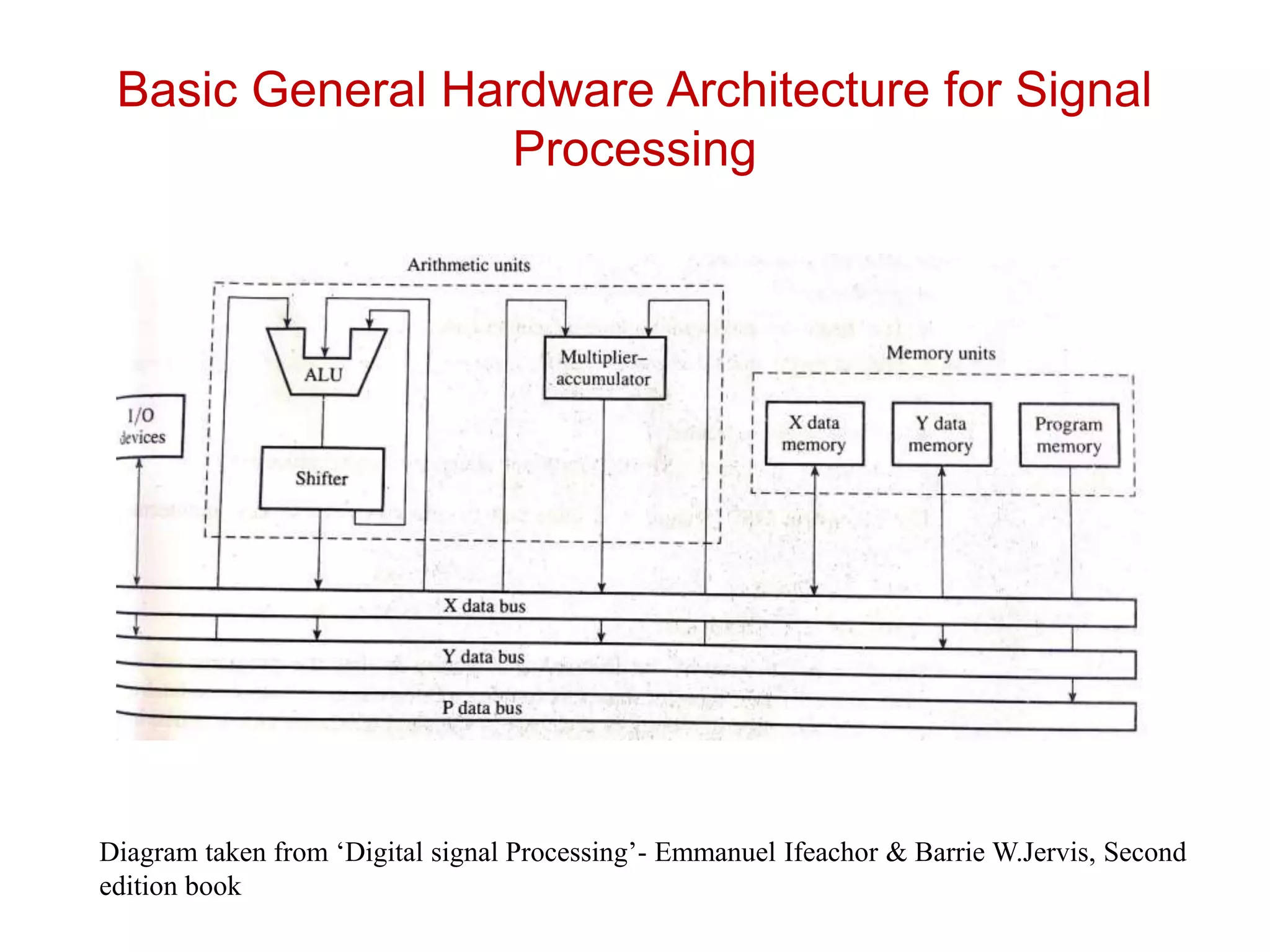
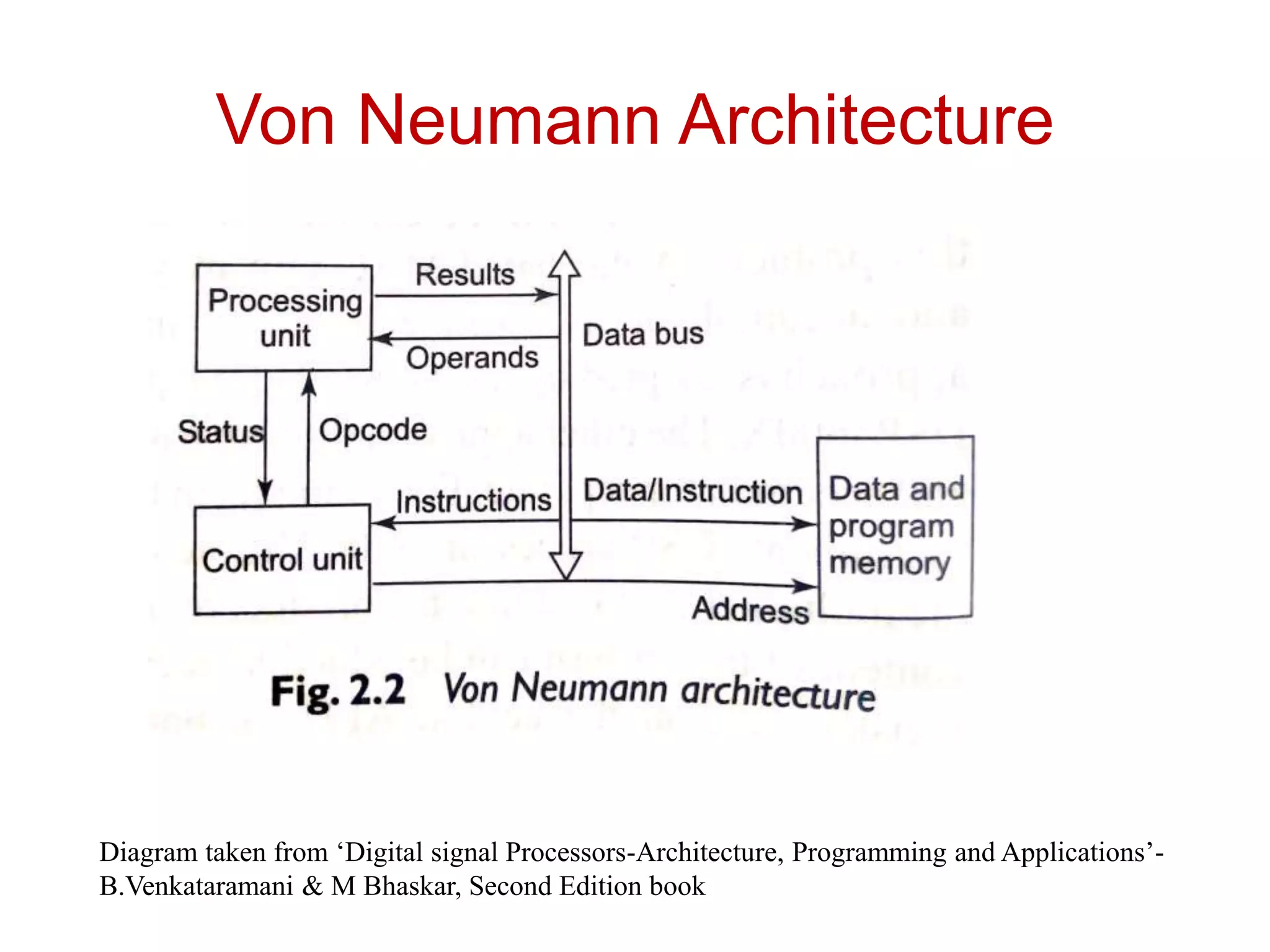
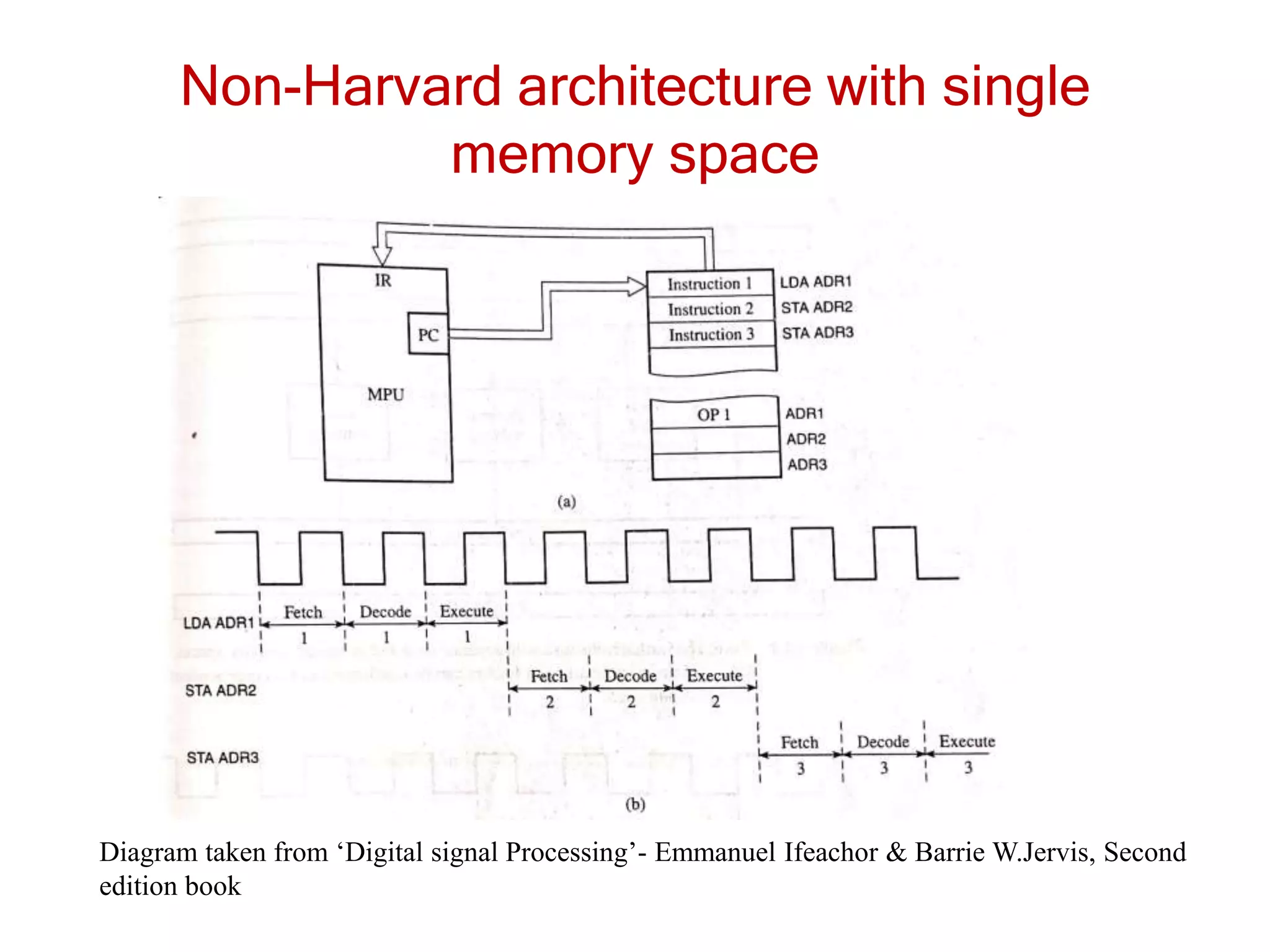
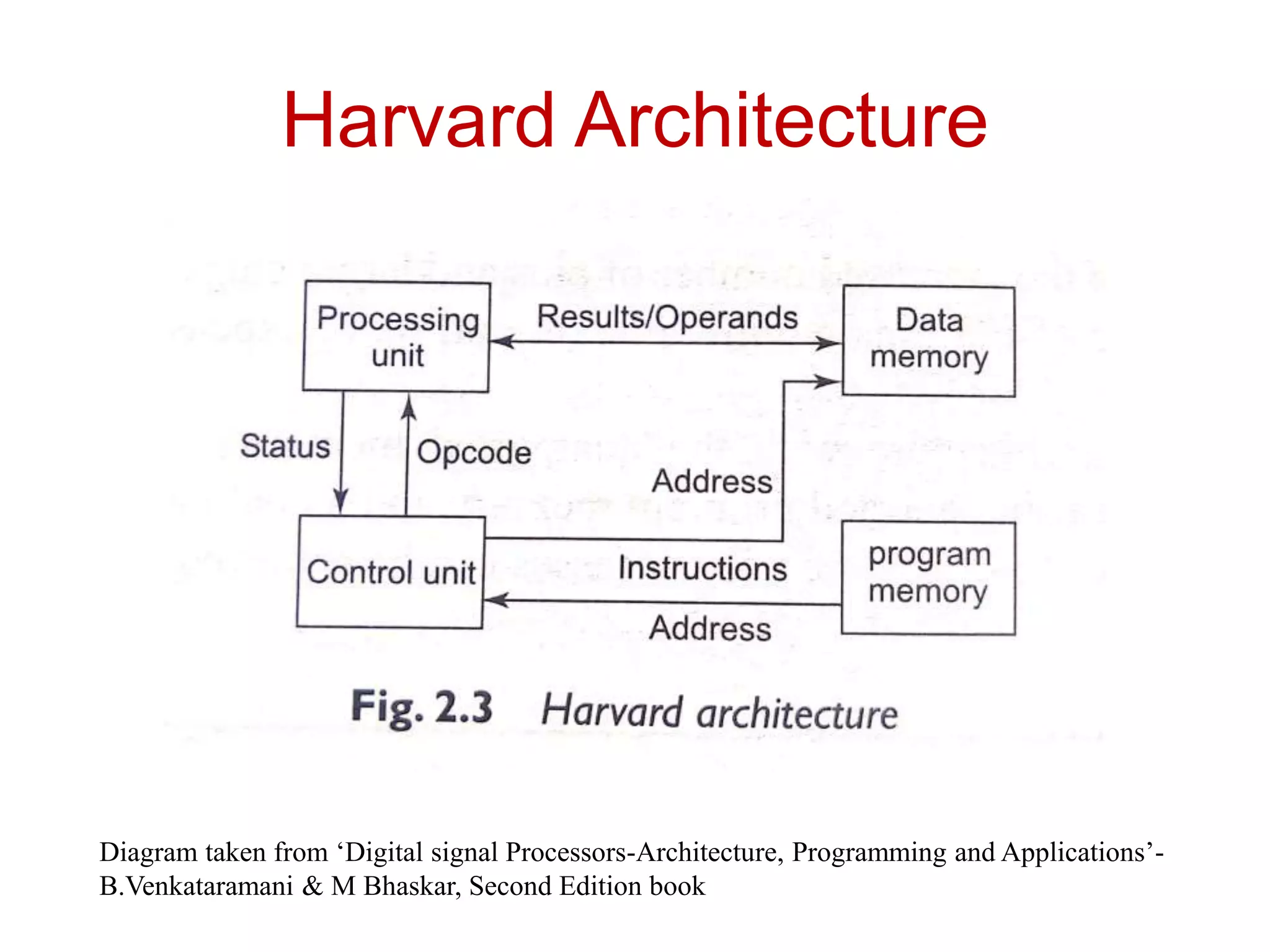
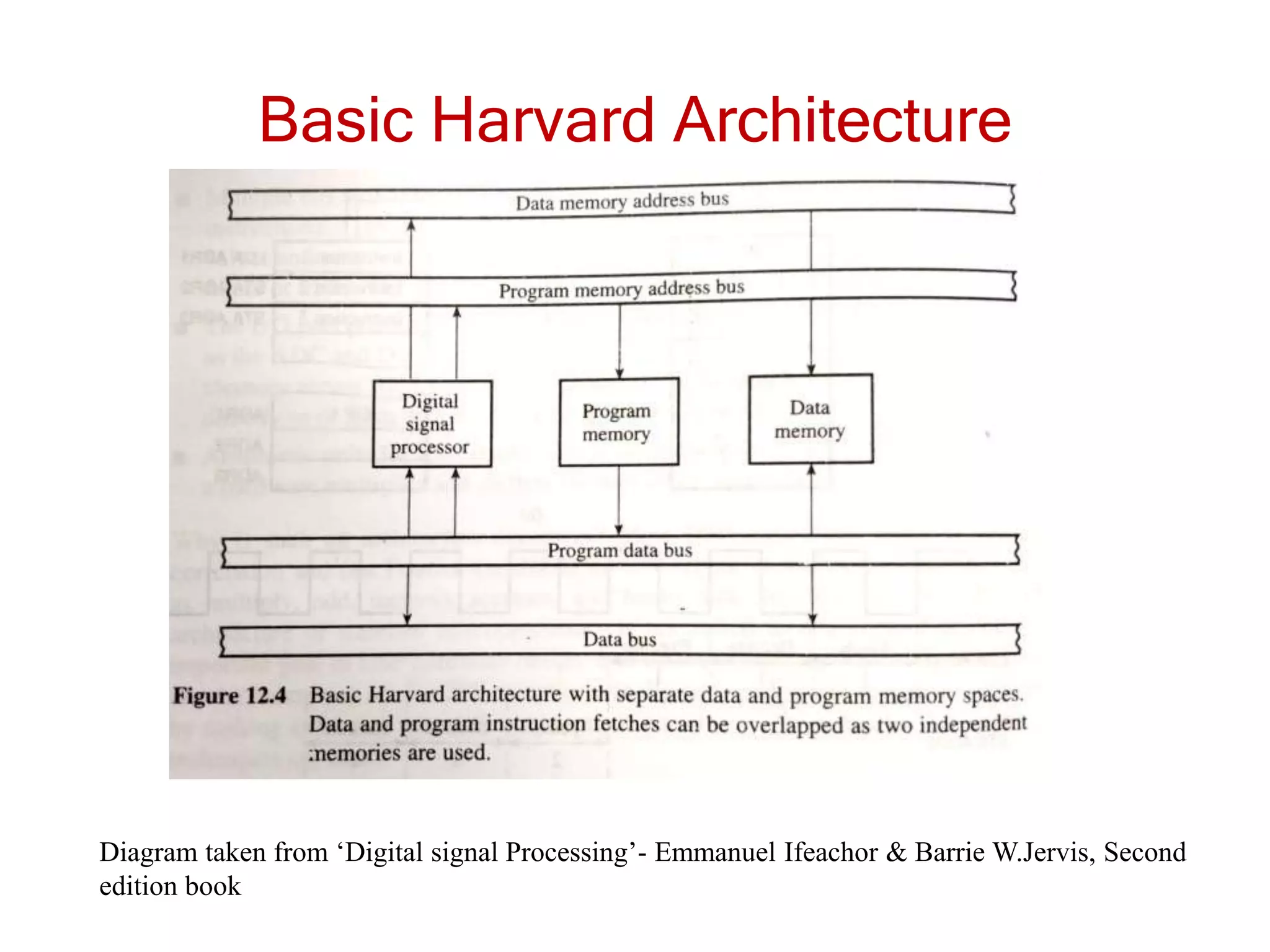
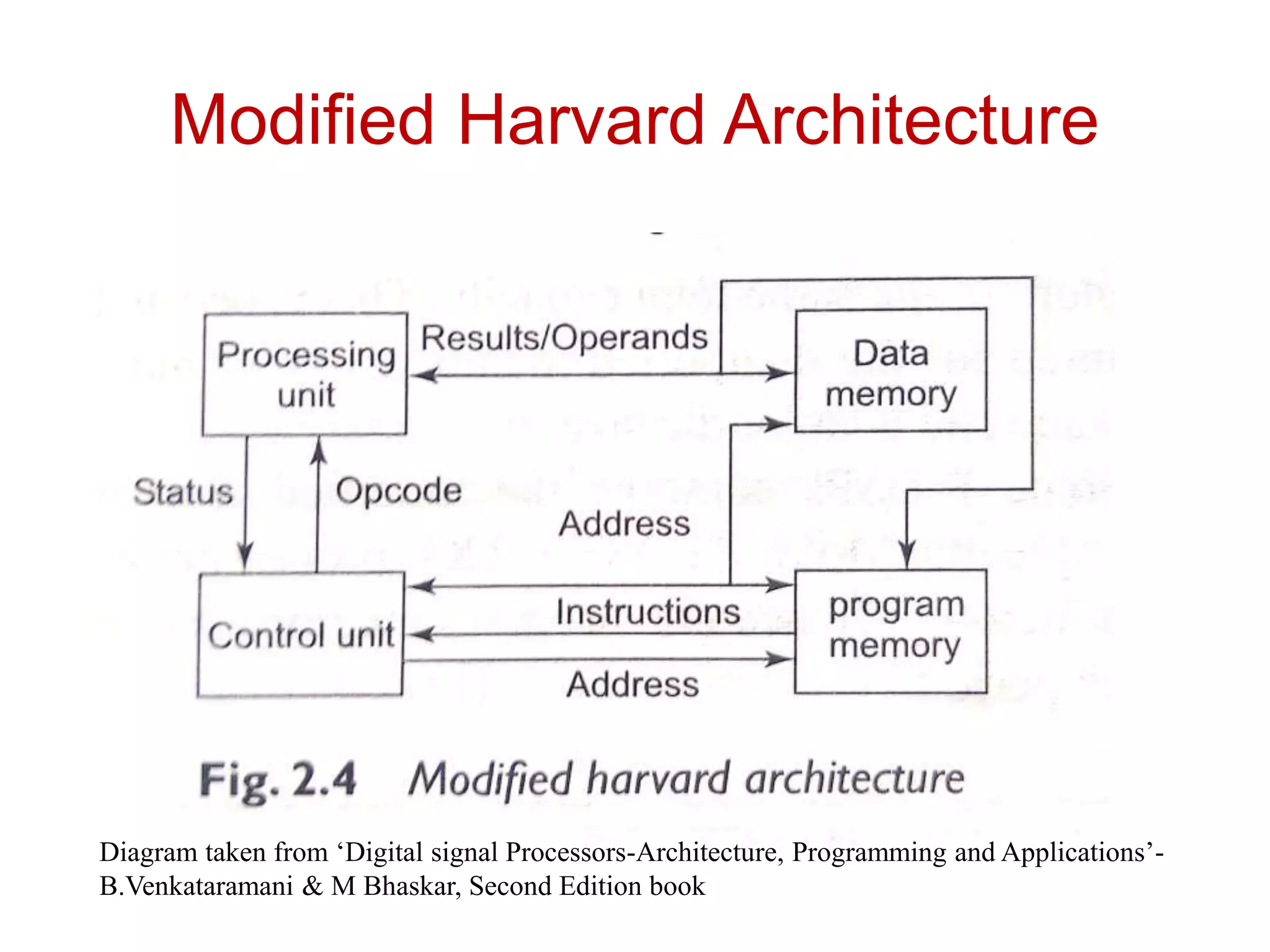
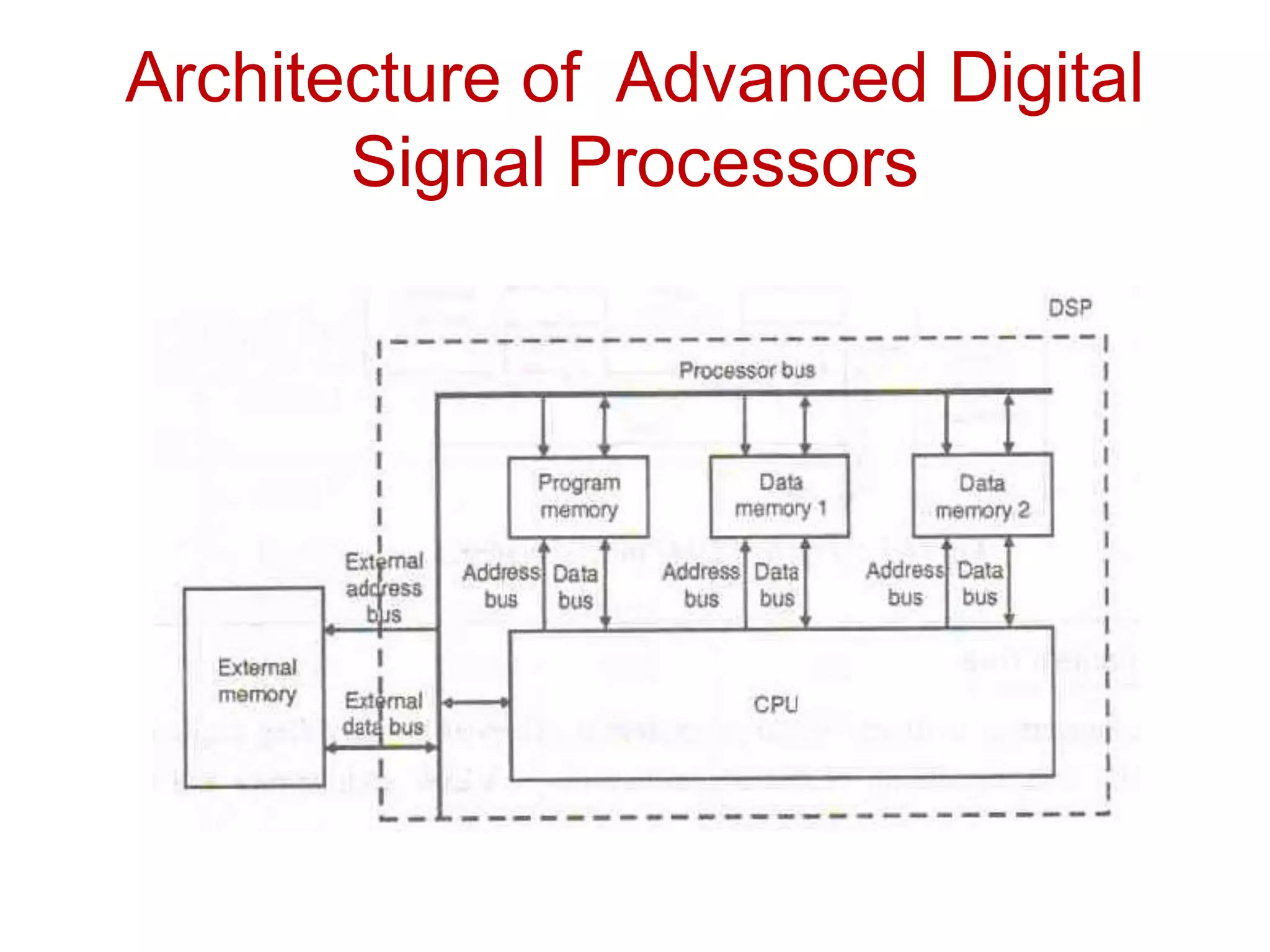
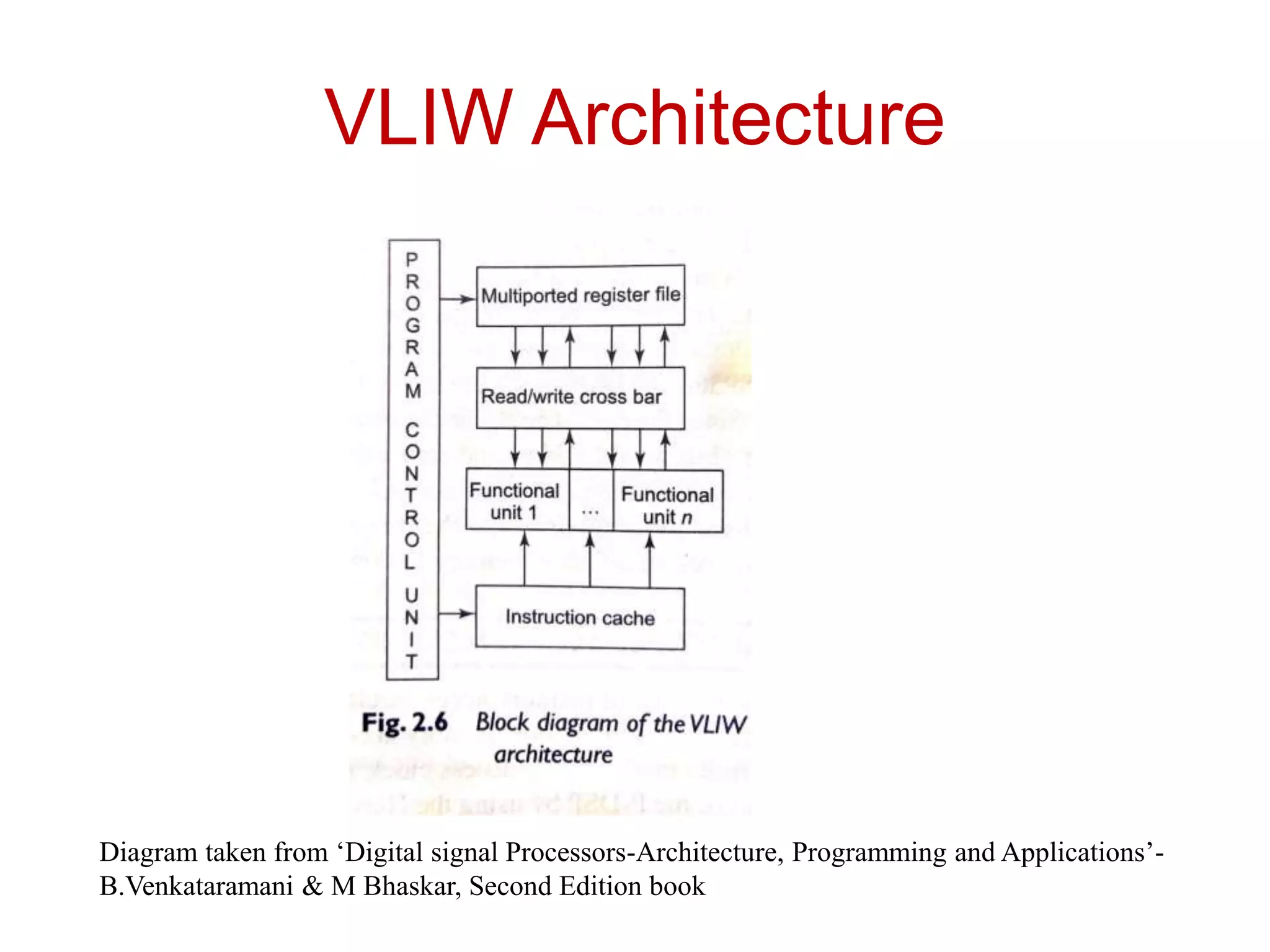
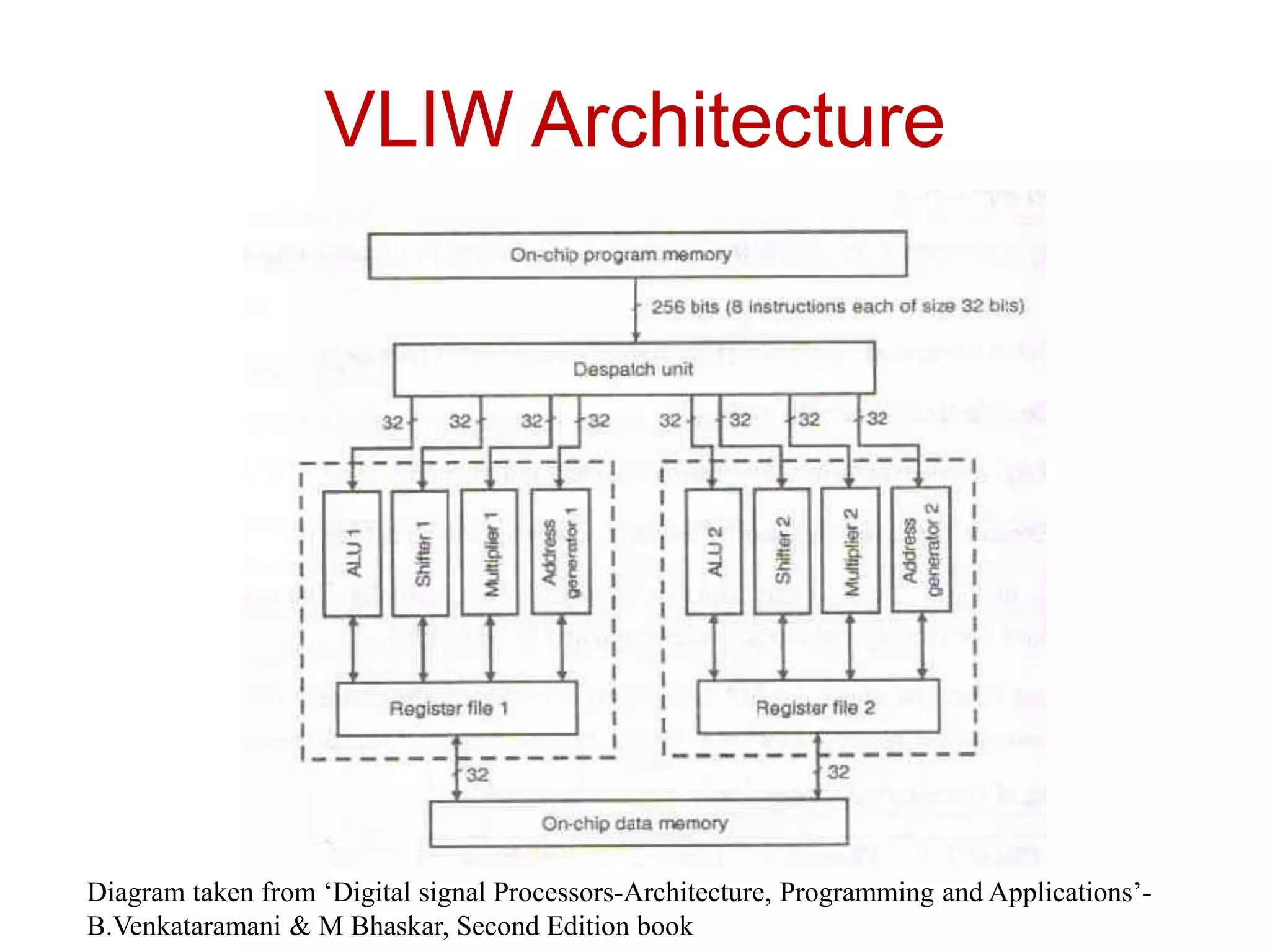
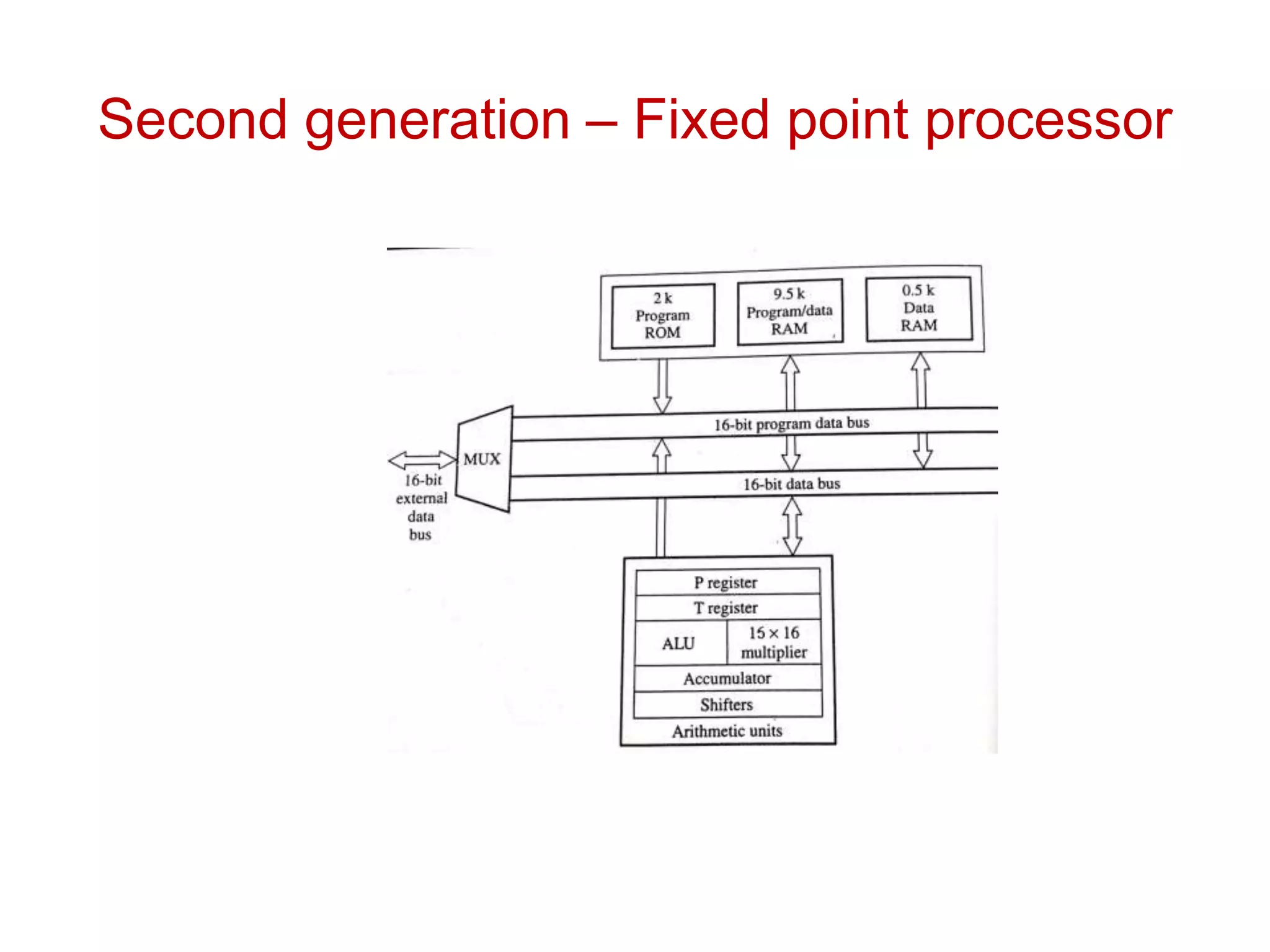
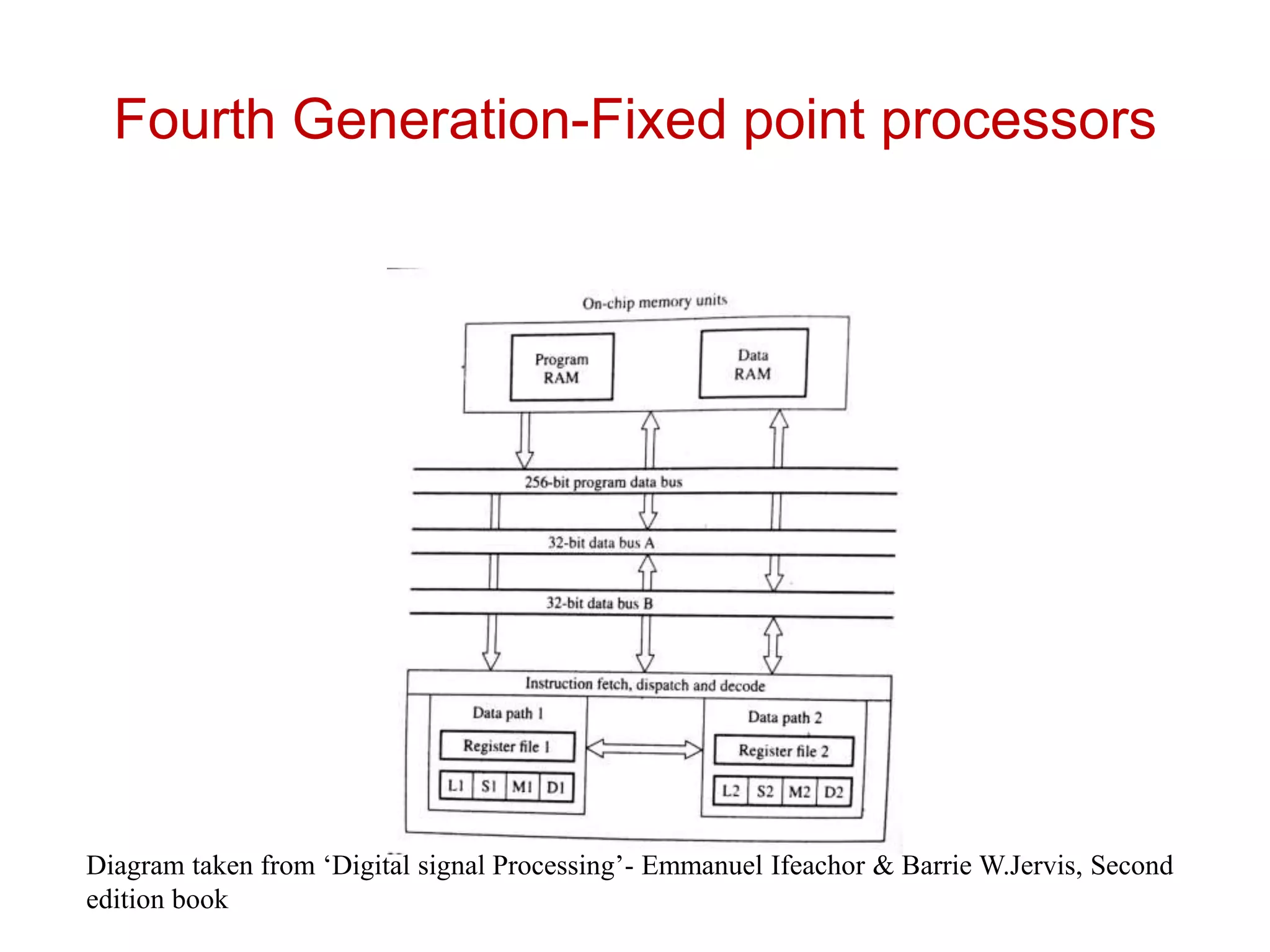
- Common DSP processors include fixed-point and floating-point processors from Texas Instruments and Analog Devices. DSP architectures include Harvard, modified Harvard, and VLIW to enable parallel instruction execution. Special DSP instructions and addressing modes also aid fast computations.
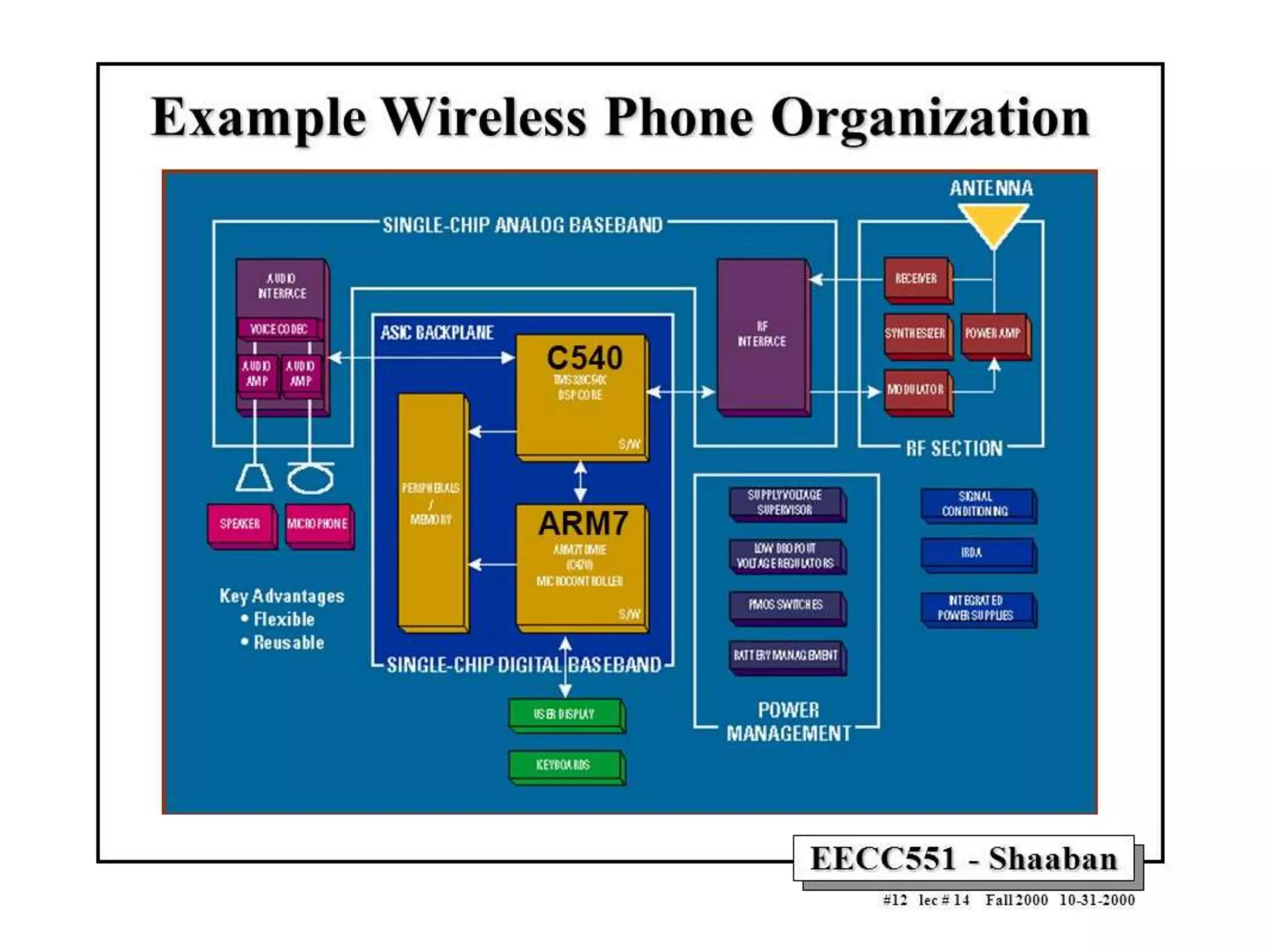
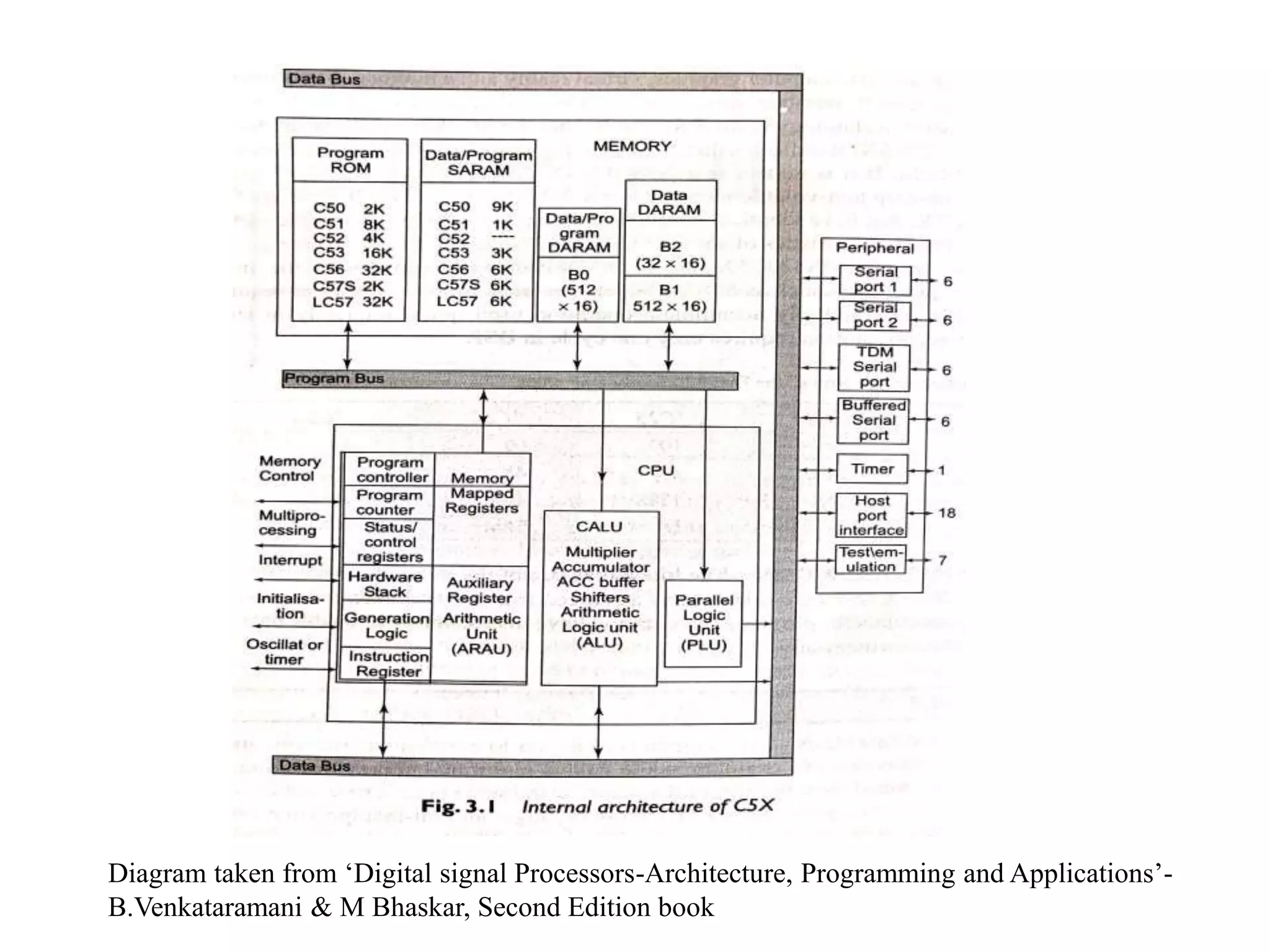
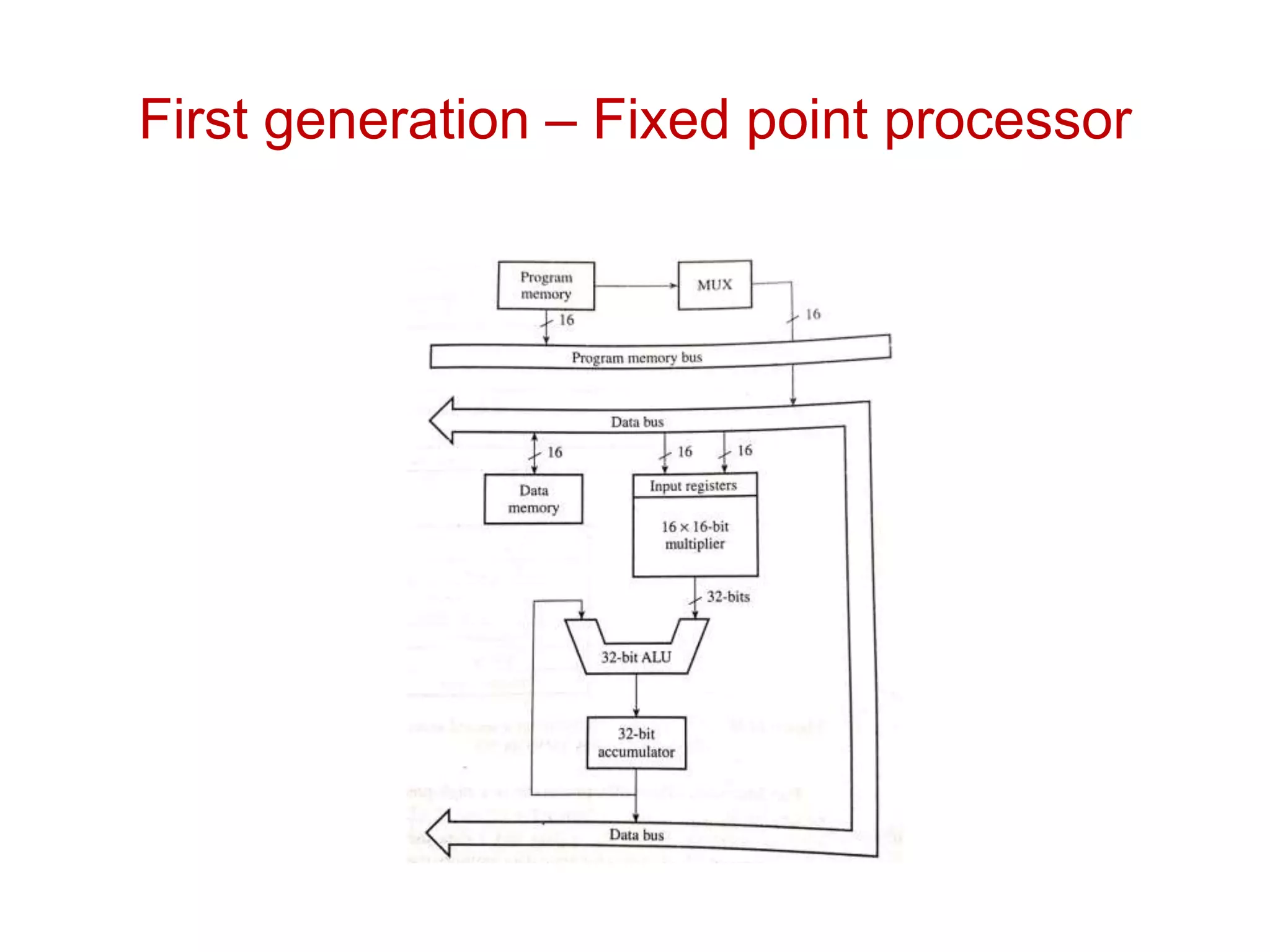
- The TMS320C5x is a 16-bit fixed-point DSP processor family with a Harvard architecture, single-cycle MAC unit, and on-chip memory that has been used in applications like audio processing, communications,