Download as PDF, PPTX
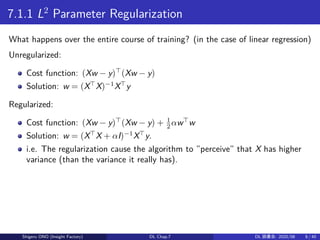
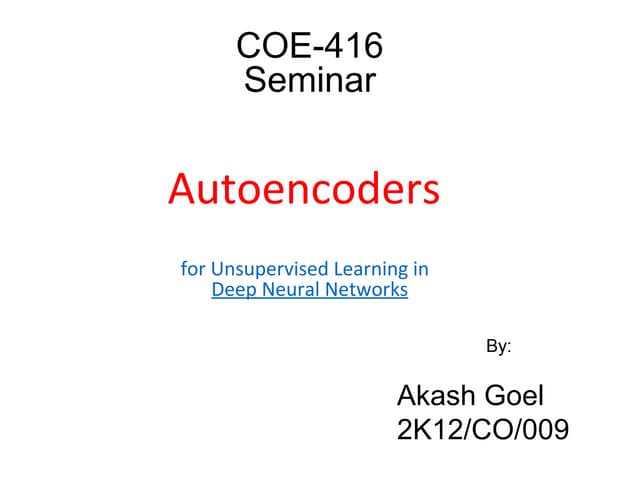
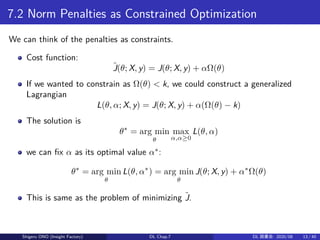
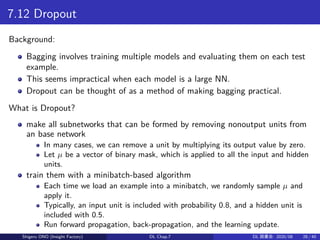
![7.1.2 L1
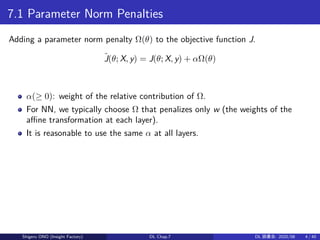
Regularization
(Cont’d)
Assume the Hessian is diagonal, H = diag([H11, . . . , Hnn]) (i.e. no correlation
between the input features)
Then we have a quadratic approximation of the cost function:
ˆJ(w; X, y) = J(w∗
; X, y) +
∑
i
(
1
2
Hii(wi − w∗
i )2
+ α|wi|
)
The solution is:
wi = sign(w∗
i ) max
(
|w∗
i | −
α
Hii
, 0
)
Consider the situation where w∗
i > 0 for all i. Then
When w∗
i ≤ α
Hii
, the optimal value is wi = 0.
When w∗
i > α
Hii
, the optimal value is just shifted by a distance α
Hii
.
Shigeru ONO (Insight Factory) DL Chap.7 DL 読書会: 2020/08 11 / 40](https://image.slidesharecdn.com/chap7-200806012107/85/Goodfellow-Bengio-Couville-2016-Deep-Learning-Chap-7-11-320.jpg)
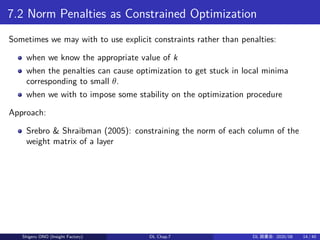
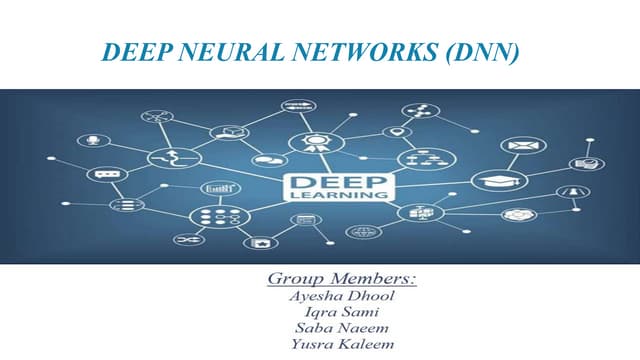
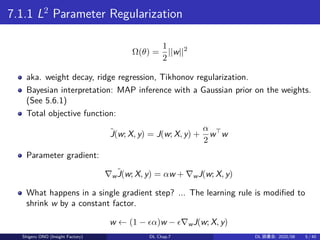
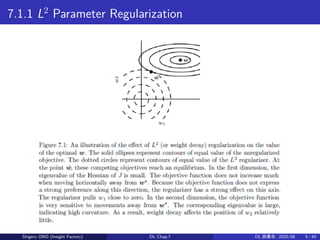
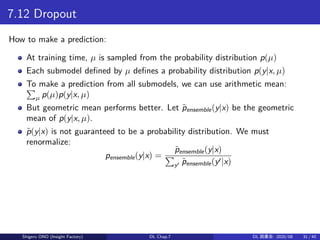
![7.5 Noise Robustness
Idea: Add noise to the weights.
It can be interpreted as a stochastic implementation of Bayesian inference
over the weight.
Noise reflect our uncertainty on the model weights.
It can also be interpreted as equivalent to a more traditional form of
regularization.
Consider we wish to train a function ˆy(x) using the least-square cost function
J = Ep(x,y)[(ˆy(x) − y)2
]
Assume that we also include a random perturbation ϵw ∼ N(ϵ; 0, ηI) of the
network weights.
The objective function becomes ˜JW = Ep(x,y,ϵW)[(ˆyeW (x) − y)2
]
For small η, it is equivalent to J with a regularization term
ηEp(x,y)[||∇Wˆy(x)||2
].
It push the model into regions where the model is relatively insensitive to small
variations in the weights, finding points that are not merely minima, but
minima surrounded by flat regions.
Shigeru ONO (Insight Factory) DL Chap.7 DL 読書会: 2020/08 17 / 40](https://image.slidesharecdn.com/chap7-200806012107/85/Goodfellow-Bengio-Couville-2016-Deep-Learning-Chap-7-17-320.jpg)

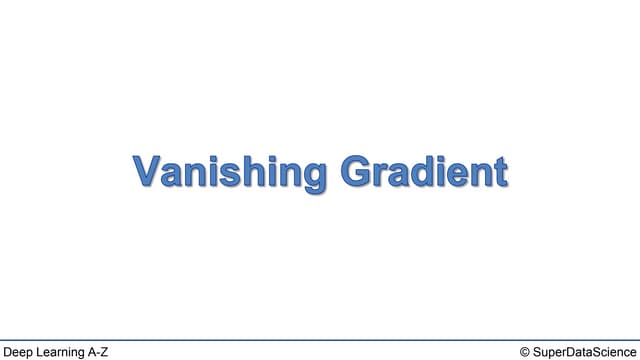
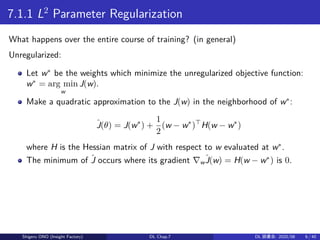
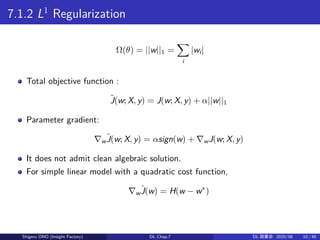
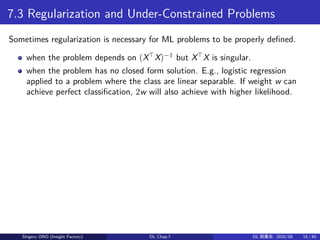
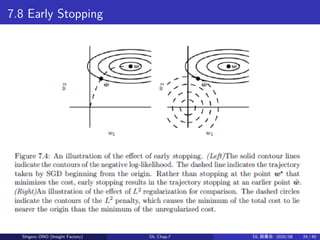
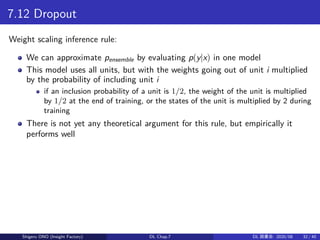
![7.8 Early Stopping
How early stopping acts as regularizer:
Restricting both the number of iterations and the learning rate limit the
volume of parameter space reachable from the initial parameter value.
In a simple linear model with a quadratic error function and simple gradient
decent, early stopping is equivalent to L2
regularization. [...skipped...]
Shigeru ONO (Insight Factory) DL Chap.7 DL 読書会: 2020/08 23 / 40](https://image.slidesharecdn.com/chap7-200806012107/85/Goodfellow-Bengio-Couville-2016-Deep-Learning-Chap-7-23-320.jpg)


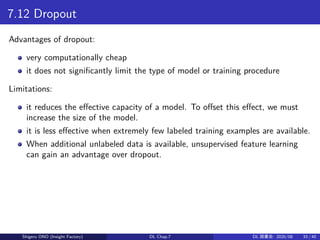

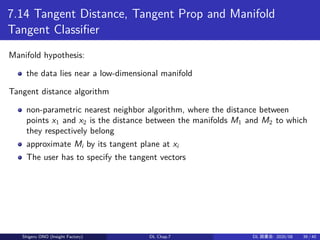
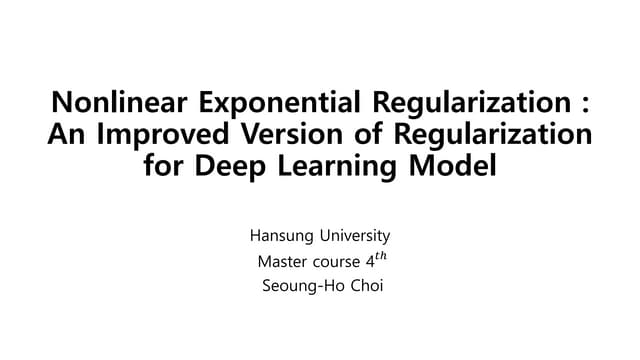
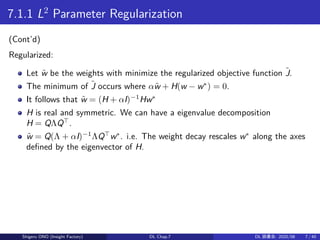
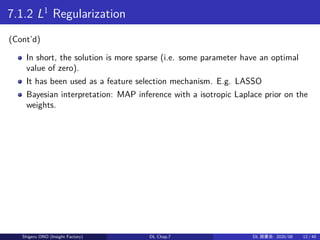
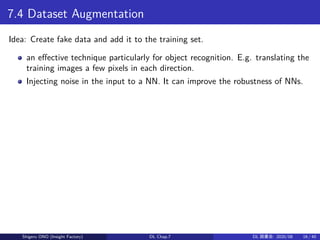
![7.14 Tangent Distance, Tangent Prop and Manifold
Tangent Classifier
Tangent prop algorithm:
[...skipped...]
double backprop:
[...skipped...]
Shigeru ONO (Insight Factory) DL Chap.7 DL 読書会: 2020/08 40 / 40](https://image.slidesharecdn.com/chap7-200806012107/85/Goodfellow-Bengio-Couville-2016-Deep-Learning-Chap-7-40-320.jpg)

Regularization is used in deep learning to reduce generalization error by modifying the learning algorithm. Common regularization techniques for deep neural networks include: 1) Parameter norm penalties like L2 and L1 regularization that penalize the weights of a network. This encourages simpler models that generalize better. 2) Early stopping which obtains the model parameters at the point of lowest validation error during training, rather than at the end of training. 3) Data augmentation which creates additional fake training data through techniques like translation to improve robustness.