
Recommended
More Related Content
Similar to Rangkaian Thermistor
Similar to Rangkaian Thermistor (20)
Recently uploaded
Recently uploaded (20)
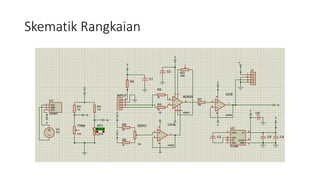
Rangkaian Thermistor
- 2. Hambatan Thermistor terhadap suhu 0 5 10 15 20 25 30 35 0 10 20 30 40 50 60 70 80 90 100 R (kOhm) Temperatur (oC) R Thermistor terhadap Suhu R (kOhm) turun R(kOhm) naik -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0 10 20 30 40 50 60 70 80 90 100 Deviasi (kOhm) Temperatur (oC) Deviasi R Thermistor
- 3. Output rangkaian analog 0 1 2 3 4 5 6 7 8 9 10 20 30 40 50 60 70 80 R (kOhm), V(V) Temperatur (oC) R Thermistor, Vab, dan Vout vs Temperatur Hambatan (kOhm) Vab (V) Vout (V)
- 4. Fitting digital 0 10 20 30 40 50 60 70 80 0 200 400 600 800 1000 Temperatur ( o C) N Temperatur hasil fitting dan pengukuran T fitting T ukur
- 5. Lookup Table -3 -2 -1 0 1 2 3 25 35 45 55 65 75 85 Deviasi ( o C) Temperatur (oC) Deviasi Temperatur alat vs Termocouple Kurva hambatan thermistor terhadap suhu pada suhu diatas 60oC memiliki gradien yang landai, sehingga sensitivitasnya pada suhu diatas suhu tersebut lebih rendah dan rawan terjadi kesalahan saat karakterisasi nilai hambatan thermistor tersebut 0 10 20 30 40 0 50 100
- 6. Metoda On-Off 0 10 20 30 40 50 60 0 500 1000 1500 2000 Temperatur ( o C) t (s) On-Off 566mL 0 10 20 30 40 50 60 0 500 1000 1500 2000 T ( o C) t (s) On-Off 850mL 0 10 20 30 40 50 60 0 500 1000 1500 2000 T ( o C) t (s) On-Off 1133mL
- 7. Metoda On-Off Volume (mL) Risetime (s) Error steady- state (%) Overshoot (%) 566 119 9.56 6.28 850 209 5.6 5.7 1133 272 5.36 3.32 0 10 20 30 40 50 60 0 200 400 600 800 1000 1200 1400 1600 1800 2000 Temperatur ( o C) t (s) On-Off 566mL 850mL 1133mL - Terdapat jarak antara heater dan thermistor - Saat thermistor mendeteksi suhu mencapai set point dan mematikan relay, suhu di heater diatas suhu set point tersebut, sehingga ada residu termal yang terdapat pada heater yang dapat menaikkan temperatur air. - Residu termal pada heater tidak bergantung volume air sehingga semakin besar volume air maka kenaikan suhu karena residu termal akan semakin kecil, sehingga semakin kecil volume air akan semakin besar overshootnya.
- 8. Variasi nilai Kp, Ki=Kd=0 0 10 20 30 40 50 60 0 200 400 600 800 1000 1200 1400 1600 1800 2000 T ( o C) t (s) Variasi Kp kp200 kp500 kp1000 kp1500 kp2000 kp2500 48 48.5 49 49.5 50 50.5 51 51.5 52 0 200 400 600 800 1000 1200 1400 1600 1800 2000 T ( o C) t (s) Variasi Kp kp200 kp500 kp1000 kp1500 kp2000 kp2500 Besar Kp berbanding lurus dengan overshoot dan berbanding terbalik dengan rising time
- 9. Variasi nilai Kp, Ki=Kd=0 Kp Risetime (s) Error steady-state (%) Overshoot (%) 200 1028 -1.64 - 2.7 -2.8 500 428 -0.44 - 1.42 -0.66 1000 136 0.64 - 1.52 0.54 1500 127 1.32 - 1.42 2.08 2000 122 2.08 - 1.32 3.1 2500 116 1.86-1.32 3.32 559, 49.51 689, 49.45 48 48.5 49 49.5 50 50.5 51 51.5 52 0 500 1000 1500 2000 2500 T ( o C) t (s) Kp=2000 Kcr 2000 Pcr 130 Kp Ti Ti P 0.5Kcr ∞ 0 PI 0.45Kcr 1/12Pcr 0 PID 0.6Kcr 0.5Pcr 0.125Pcr Kp 1000 Ti 65 Td 16.25 Kp 1000 Ki 15.38462 Kd 16250
- 10. Variasi Kp, Ki, Kd 0 10 20 30 40 50 60 70 0 200 400 600 800 1000 1200 1400 1600 1800 2000 T ( o C) t (s) Variasi Kp, Ki, Kd 1000, 15, 16250 1000, 5, 16250 1000, 5, 1625 800, 5, 1625 800, 0.5, 1625 600, 0.1, 2000 Variasi Risetime (s) Error steady- state (%) Overshoot (%) 1 Kp 1000 124 17.28 - -15.22 14.08 Ki 15 Kd 16250 2 Kp 1000 131 16.76 - -14.78 14.32 Ki 5 Kd 16250 3 Kp 1000 130 1.2-0.98 8.38 Ki 5 Kd 1625 4 Kp 800 137 1.2-0.44 4 Ki 1 Kd 1625 5 Kp 800 138 1.64--0.1 2.3 Ki 0.5 Kd 1625 6 Kp 600 156 0.98-0.56 0.64 Ki 0.1 Kd 2000 Risetime Overshoot steady- state error Kp ↓ ↑ ↓ Ki ↓ ↑ ↓ Kd Δ ↓ -
- 11. On-Off vs PID 0 10 20 30 40 50 60 0 200 400 600 800 1000 1200 1400 1600 1800 2000 T ( o C) t (s) On-Off vs PID On-Off 600, 0.1, 2000 Tipe Controller Risetime (s) Error steady- state (%) Overshoot (%) On-Off 119 9.56-1.32 6.28 PID 156 0.98-0.56 0.64 PID dapat menurunkan overshoot dan menahan error steady-state dibawah 1%, tetapi sedikit menaikkan risetime.