Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
tiny_ak
PPTX, PDF
32,547 views
カルマンフィルタについて
カルマンフィルタについてまとめられることをまとめました。
Technology
◦
Read more
44
Save
Share
Embed
Embed presentation
Download
Downloaded 196 times
1
/ 23
2
/ 23
3
/ 23
4
/ 23
5
/ 23
6
/ 23
7
/ 23
8
/ 23
9
/ 23
10
/ 23
11
/ 23
12
/ 23
13
/ 23
14
/ 23
15
/ 23
16
/ 23
17
/ 23
18
/ 23
19
/ 23
20
/ 23
21
/ 23
22
/ 23
23
/ 23
More Related Content
PPTX
[Ridge-i 論文よみかい] Wasserstein auto encoder
by
Masanari Kimura
PDF
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
PDF
強化学習その1
by
nishio
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
PPTX
多目的強凸最適化のパレート集合のトポロジー
by
KLab Inc. / Tech
PDF
LSTM (Long short-term memory) 概要
by
Kenji Urai
PDF
最急降下法
by
Akira Miyazawa
PDF
統計的係り受け解析入門
by
Yuya Unno
[Ridge-i 論文よみかい] Wasserstein auto encoder
by
Masanari Kimura
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
強化学習その1
by
nishio
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
多目的強凸最適化のパレート集合のトポロジー
by
KLab Inc. / Tech
LSTM (Long short-term memory) 概要
by
Kenji Urai
最急降下法
by
Akira Miyazawa
統計的係り受け解析入門
by
Yuya Unno
What's hot
PPTX
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
PDF
トピックモデルの評価指標 Coherence 研究まとめ #トピ本
by
hoxo_m
PDF
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
by
Yahoo!デベロッパーネットワーク
PDF
カルマンフィルタ講義資料
by
Nobutaka Shimada
PDF
Optimizer入門&最新動向
by
Motokawa Tetsuya
PDF
PCAの最終形態GPLVMの解説
by
弘毅 露崎
PDF
Semantic segmentation
by
Takuya Minagawa
PDF
一般化線形モデル (GLM) & 一般化加法モデル(GAM)
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
深層強化学習でマルチエージェント学習(前篇)
by
Junichiro Katsuta
PDF
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
PDF
SSII2020 [OS2-03] 深層学習における半教師あり学習の最新動向
by
SSII
PDF
強化学習の基礎的な考え方と問題の分類
by
佑 甲野
PDF
Hyperoptとその周辺について
by
Keisuke Hosaka
PDF
Deeplearning輪読会
by
正志 坪坂
PDF
数学で解き明かす深層学習の原理
by
Taiji Suzuki
PDF
クラシックな機械学習の入門 11.評価方法
by
Hiroshi Nakagawa
PPTX
KubernetesでGPUクラスタを管理したい
by
Yuji Oshima
PDF
データに内在する構造をみるための埋め込み手法
by
Tatsuya Shirakawa
PPTX
変分ベイズ法の説明
by
Haruka Ozaki
PPTX
[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)
by
Deep Learning JP
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
トピックモデルの評価指標 Coherence 研究まとめ #トピ本
by
hoxo_m
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
by
Yahoo!デベロッパーネットワーク
カルマンフィルタ講義資料
by
Nobutaka Shimada
Optimizer入門&最新動向
by
Motokawa Tetsuya
PCAの最終形態GPLVMの解説
by
弘毅 露崎
Semantic segmentation
by
Takuya Minagawa
一般化線形モデル (GLM) & 一般化加法モデル(GAM)
by
Deep Learning Lab(ディープラーニング・ラボ)
深層強化学習でマルチエージェント学習(前篇)
by
Junichiro Katsuta
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
SSII2020 [OS2-03] 深層学習における半教師あり学習の最新動向
by
SSII
強化学習の基礎的な考え方と問題の分類
by
佑 甲野
Hyperoptとその周辺について
by
Keisuke Hosaka
Deeplearning輪読会
by
正志 坪坂
数学で解き明かす深層学習の原理
by
Taiji Suzuki
クラシックな機械学習の入門 11.評価方法
by
Hiroshi Nakagawa
KubernetesでGPUクラスタを管理したい
by
Yuji Oshima
データに内在する構造をみるための埋め込み手法
by
Tatsuya Shirakawa
変分ベイズ法の説明
by
Haruka Ozaki
[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)
by
Deep Learning JP
Viewers also liked
PDF
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
PDF
5分でわかるかもしれないglmnet
by
Nagi Teramo
PDF
機械の代わりに人間が学習入門
by
Shuyo Nakatani
PDF
Data assim r
by
Xiangze
PPTX
MCMCによる回帰分析@ベイズセミナー
by
Takashi Yamane
PDF
Pystan for nlp
by
Xiangze
PDF
セグメンテーションの考え方・使い方 - TokyoR #44
by
horihorio
PDF
マーケティングサイエンス徹底入門と実践Part2
by
宏喜 佐野
PDF
ベイジアンモデリングによるマーケティングサイエンス〜状態空間モデルを用いたモデリング
by
宏喜 佐野
ODP
Ml ch7
by
Ryo Higashigawa
PPTX
状態空間モデル等による多変量時系列データ解析
by
businessanalytics
PDF
PyMC mcmc
by
Xiangze
PDF
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
PDF
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
PDF
分析のビジネス展開を考える―状態空間モデルを例に @TokyoWebMining #47
by
horihorio
PDF
状態空間モデルの実行方法と実行環境の比較
by
Hiroki Itô
PDF
『予測にいかす統計モデリングの基本』の売上データの分析をトレースしてみた
by
. .
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
PDF
ロジスティック回帰の考え方・使い方 - TokyoR #33
by
horihorio
PDF
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
5分でわかるかもしれないglmnet
by
Nagi Teramo
機械の代わりに人間が学習入門
by
Shuyo Nakatani
Data assim r
by
Xiangze
MCMCによる回帰分析@ベイズセミナー
by
Takashi Yamane
Pystan for nlp
by
Xiangze
セグメンテーションの考え方・使い方 - TokyoR #44
by
horihorio
マーケティングサイエンス徹底入門と実践Part2
by
宏喜 佐野
ベイジアンモデリングによるマーケティングサイエンス〜状態空間モデルを用いたモデリング
by
宏喜 佐野
Ml ch7
by
Ryo Higashigawa
状態空間モデル等による多変量時系列データ解析
by
businessanalytics
PyMC mcmc
by
Xiangze
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
分析のビジネス展開を考える―状態空間モデルを例に @TokyoWebMining #47
by
horihorio
状態空間モデルの実行方法と実行環境の比較
by
Hiroki Itô
『予測にいかす統計モデリングの基本』の売上データの分析をトレースしてみた
by
. .
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
ロジスティック回帰の考え方・使い方 - TokyoR #33
by
horihorio
機械学習によるデータ分析まわりのお話
by
Ryota Kamoshida
Similar to カルマンフィルタについて
PPT
086 独立性の検定
by
t2tarumi
PDF
第8回スキル養成講座講義資料.pdf
by
keiodig
PDF
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
PDF
NLPforml5
by
Hidekazu Oiwa
PDF
PRML2.1 2.2
by
Takuto Kimura
PDF
パターン認識02 k平均法ver2.0
by
sleipnir002
PPT
060 期待値・中心極限定理
by
t2tarumi
PDF
ベイズ推論による機械学習入門 第4章
by
YosukeAkasaka
PDF
量子アニーリング解説 1
by
Kohta Ishikawa
PDF
Prml1.2.4
by
Tomoyuki Hioki
PPT
070 統計的推測 母集団と推定
by
t2tarumi
086 独立性の検定
by
t2tarumi
第8回スキル養成講座講義資料.pdf
by
keiodig
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
NLPforml5
by
Hidekazu Oiwa
PRML2.1 2.2
by
Takuto Kimura
パターン認識02 k平均法ver2.0
by
sleipnir002
060 期待値・中心極限定理
by
t2tarumi
ベイズ推論による機械学習入門 第4章
by
YosukeAkasaka
量子アニーリング解説 1
by
Kohta Ishikawa
Prml1.2.4
by
Tomoyuki Hioki
070 統計的推測 母集団と推定
by
t2tarumi
カルマンフィルタについて
1.
カルマンフィルタについて
2.
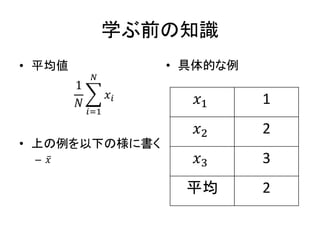
学ぶ前の知識 • 平均値 1 𝑁 𝑖=1 𝑁 𝑥𝑖 • 上の例を以下の様に書く –
𝑥 • 具体的な例 𝑥1 1 𝑥2 2 𝑥3 3 平均 2
3.
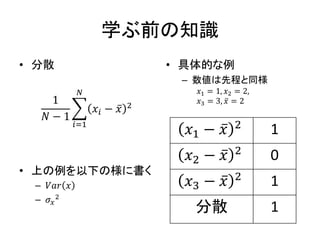
学ぶ前の知識 • 分散 1 𝑁 −
1 𝑖=1 𝑁 𝑥𝑖 − 𝑥 2 • 上の例を以下の様に書く – 𝑉𝑎𝑟 𝑥 – 𝜎𝑥 2 • 具体的な例 – 数値は先程と同様 𝑥1 = 1, 𝑥2 = 2, 𝑥3 = 3, 𝑥 = 2 𝑥1 − 𝑥 2 1 𝑥2 − 𝑥 2 0 𝑥3 − 𝑥 2 1 分散 1
4.
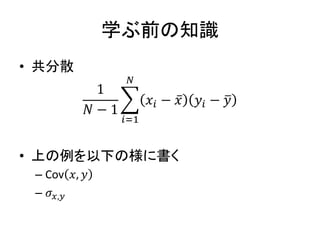
学ぶ前の知識 • 共分散 1 𝑁 −
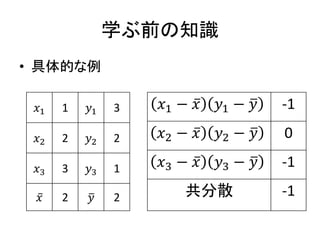
1 𝑖=1 𝑁 𝑥𝑖 − 𝑥 𝑦𝑖 − 𝑦 • 上の例を以下の様に書く – Cov 𝑥, 𝑦 – 𝜎𝑥,𝑦
5.
学ぶ前の知識 • 具体的な例 𝑥1 1
𝑦1 3 𝑥2 2 𝑦2 2 𝑥3 3 𝑦3 1 𝑥 2 𝑦 2 𝑥1 − 𝑥 𝑦1 − 𝑦 -1 𝑥2 − 𝑥 𝑦2 − 𝑦 0 𝑥3 − 𝑥 𝑦3 − 𝑦 -1 共分散 -1
6.
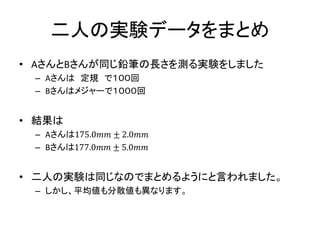
二人の実験データをまとめ • AさんとBさんが同じ鉛筆の長さを測る実験をしました – Aさんは
定規 で100回 – Bさんはメジャーで1000回 • 結果は – Aさんは175.0𝑚𝑚 ± 2.0𝑚𝑚 – Bさんは177.0𝑚𝑚 ± 5.0𝑚𝑚 • 二人の実験は同じなのでまとめるようにと言われました。 – しかし、平均値も分散値も異なります。
7.
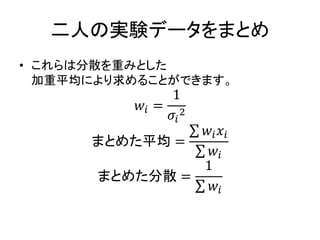
二人の実験データをまとめ • これらは分散を重みとした 加重平均により求めることができます。 𝑤𝑖 = 1 𝜎𝑖 2 まとめた平均
= 𝑤𝑖 𝑥𝑖 𝑤𝑖 まとめた分散 = 1 𝑤𝑖
8.
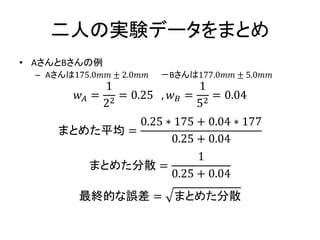
二人の実験データをまとめ • AさんとBさんの例 – Aさんは175.0𝑚𝑚
± 2.0𝑚𝑚 -Bさんは177.0𝑚𝑚 ± 5.0𝑚𝑚 𝑤 𝐴 = 1 22 = 0.25 , 𝑤 𝐵 = 1 52 = 0.04 まとめた平均 = 0.25 ∗ 175 + 0.04 ∗ 177 0.25 + 0.04 まとめた分散 = 1 0.25 + 0.04 最終的な誤差 = まとめた分散
9.
二人の実験データをまとめ • 結果二人の実験結果は 175.3𝑚𝑚 ±
1.9𝑚𝑚 • となり尤もらしい値に近づいた。 • ちなみに実際は 軸径 : 7.2mm 厚さ : 7.8mm 全長 :176mm 重さ : 6.6g
10.
カルマンフィルタでは • カルマンフィルタではこのような操作を積分中 の値に対して行い誤差を取り除く – 例はドリフトがある計測器のドリフトは実装前後で 取り除かれていることが即座に分かる。 –
それ以外は数式とセンサーの精度に依存する。
11.
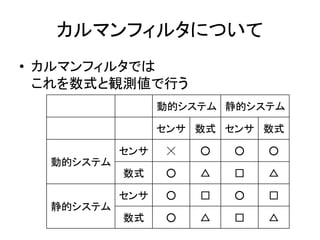
カルマンフィルタについて • カルマンフィルタでは これを数式と観測値で行う 動的システム 静的システム センサ
数式 センサ 数式 動的システム センサ ☓ ○ ○ ○ 数式 ○ △ □ △ 静的システム センサ ○ □ ○ □ 数式 ○ △ □ △
12.
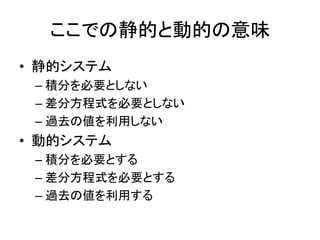
ここでの静的と動的の意味 • 静的システム – 積分を必要としない –
差分方程式を必要としない – 過去の値を利用しない • 動的システム – 積分を必要とする – 差分方程式を必要とする – 過去の値を利用する
13.
記号の意味について • ○実システムで実装可能 – センサーの誤差が取り除かれる •
△シミュレーション – 数式の誤差が取り除かれる • □数式モデルの精度評価 – 数式の誤差が取り除かれる • ☓実装不可能 – ドリフトが同じ方に推移した場合誤差は取り除かれない
14.
△での分散の扱いについて • 線形化に伴う誤差からの導出が可能 • 不明の場合 –
分散を0とすると計算時にエラーとなる • ドリフト許容量を分散とする • 実験により適宜設定する • シミュレーションでは、自由にシステムを想定すること が出来るため適当に設定しそれぞれの特徴を調べる
15.
□での分散の扱いについて • 線形化に伴う誤差からの導出が可能 • 不明な場合 –
センサーが必ず静的システムに存在するため • 誤差の最大値と最小値を 4𝜎~3𝜎 として 設定することが可能
16.
○での分散の扱いについて • 式とセンサーの場合 – 線形化に伴う誤差からの導出が可能 –
□により得られた分散を利用する • センサー同士の場合 – データシートに記載されている分散を利用する – 実験により分散を求める – 学ぶ前の知識を漸化式化し分散をオンラインで 推定する
17.
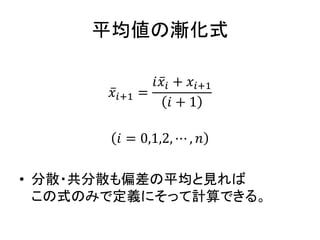
平均値の漸化式 𝑥𝑖+1 = 𝑖 𝑥𝑖
+ 𝑥𝑖+1 𝑖 + 1 𝑖 = 0,1,2, ⋯ , 𝑛 • 分散・共分散も偏差の平均と見れば この式のみで定義にそって計算できる。
18.
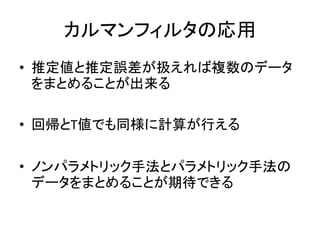
カルマンフィルタの応用 • 推定値と推定誤差が扱えれば複数のデータ をまとめることが出来る • 回帰とT値でも同様に計算が行える •
ノンパラメトリック手法とパラメトリック手法の データをまとめることが期待できる
19.
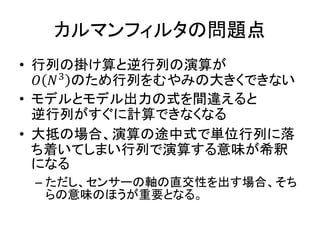
カルマンフィルタの問題点 • 行列の掛け算と逆行列の演算が 𝑂 𝑁3 のため行列をむやみの大きくできない •
モデルとモデル出力の式を間違えると 逆行列がすぐに計算できなくなる • 大抵の場合、演算の途中式で単位行列に落 ち着いてしまい行列で演算する意味が希釈 になる – ただし、センサーの軸の直交性を出す場合、そち らの意味のほうが重要となる。
20.
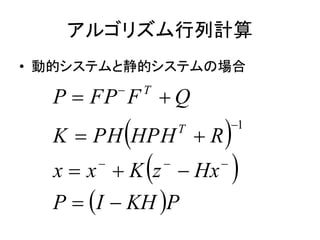
アルゴリズム行列計算 • 動的システムと静的システムの場合
PKHIP HxzKxx RHPHPHK QFFPP T T 1
21.
アルゴリズム行列計算 • 静的システム同士の場合
HxzKxx RHQHQHK T 1
22.
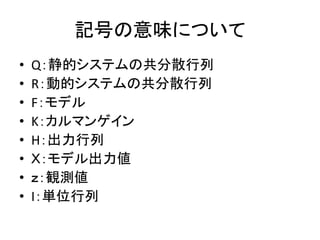
記号の意味について • Q:静的システムの共分散行列 • R:動的システムの共分散行列 •
F:モデル • K:カルマンゲイン • H:出力行列 • X:モデル出力値 • z:観測値 • I:単位行列
23.
カルマンフィルタの誤解 • 予測などと呼ばれているものはもともと現代 制御の空間状態表現で出力行列付きで更新 すれば行える標準的な機能だ。
Editor's Notes
#7
真の値176mm+-σmm 分散は誤差σの二乗
#8
実際はχ二条と最尤性原理を知っていてかつ微分が出来る技術が要求される。 導出は計測における誤差解析入門に任せる。
#10
となっている。
#12
ここでの動的と静的の違いは微積又は差分法の有無で、微積や差分法を利用するものを動的としている。 ○は実システムで実装可能 センサーの誤差が取り除かれる △はシミュレーション 数式の誤差が取り除かれる □は数式モデルの精度評価 数式の誤差が取り除かれる ☓は実装不可能 ドリフトが同じ方に推移した場合誤差は取り除かれない
#21
ここで、 Qは静的システム側の共分散行列、 Rは動的システム側の共分散行列です。 Fはモデルで Kはカルマンゲイン Hは出力行列 Xとzはモデル出力値と観測値 モデルが不要な場合は P=Qとして書き直すと K=QH(HQH^T+R)^-1 X=x^-+K(z^--Hx^-) となります。
#23
モデルが不要な場合は P=Qとして書き直すと K=QH(HQH^T+R)^-1 X=x^-+K(z^--Hx^-) となります。
Download


![[Ridge-i 論文よみかい] Wasserstein auto encoder](https://cdn.slidesharecdn.com/ss_thumbnails/wassersteinauto-encoder-181006055019-thumbnail.jpg?width=640&height=640&fit=bounds)
















![SSII2020 [OS2-03] 深層学習における半教師あり学習の最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/ssiisuzukios203-200611050727-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20190920dlhack-190920011134-thumbnail.jpg?width=640&height=640&fit=bounds)






























