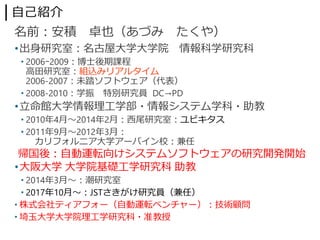
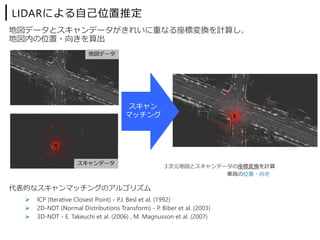
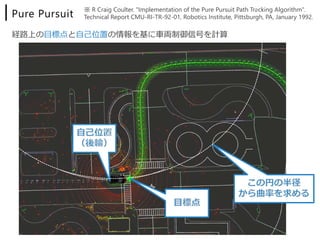
Pure Pursuit
※ RCraig Coulter. "Implementation of the Pure Pursuit Path Tracking Algorithm".
Technical Report CMU-RI-TR-92-01, Robotics Institute, Pittsburgh, PA, January 1992.
経路上の⽬標点と⾃⼰位置の情報を基に⾞両制御信号を計算
28.
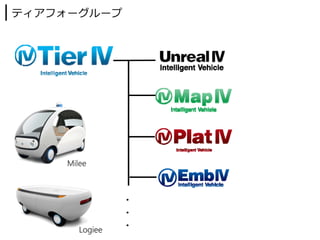
3D point-
cloud data
filteringpoint-
cloud data
points map
info
points localizer
GNSS pose vehicle pose
localizer
velocity
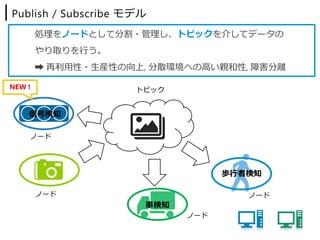
Topic
Node(s)
imagecamera
clustering
points objects
image detector
objects fusion object class
objects tracker
objects ID
current pose lattice planner
final waypoint
temporal
waypoint
ADAS map
info
route planner
lane planner
base
waypoint
waypoint
follower
Target speed,
angular velocity
twist filtering
vehicle
control
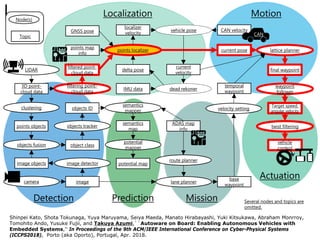
Localization
Detection
Motion
Several nodes and topics are
omitted.
image objects
CAN velocity
CAN
semantics
mapper
semantics
map
potential
mapper
potential map
dead rekoner
delta pose
IMU data
current
velocity
LIDAR
filtered point-
cloud data
velocity setting
Prediction Mission
Actuation
Shinpei Kato, Shota Tokunaga, Yuya Maruyama, Seiya Maeda, Manato Hirabayashi, Yuki Kitsukawa, Abraham Monrroy,
Tomohito Ando, Yusuke Fujii, and Takuya Azumi,``Autoware on Board: Enabling Autonomous Vehicles with
Embedded Systems,'' In Proceedings of the 9th ACM/IEEE International Conference on Cyber-Physical Systems
(ICCPS2018), Porto (aka Oporto), Portugal, Apr. 2018.
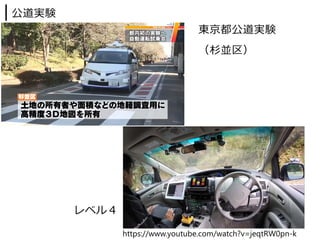
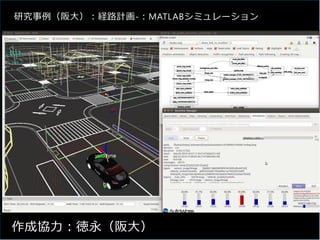
研究事例(東⼤、阪⼤、名⼤)︓Autoware on DrivePX2
ShinpeiKato, Shota Tokunaga, Yuya Maruyama, Seiya Maeda, Manato Hirabayashi, Yuki Kitsukawa,
Abraham Monrroy, Tomohito Ando, Yusuke Fujii, and Takuya Azumi,``Autoware on Board:
Enabling Autonomous Vehicles with Embedded Systems,'' In Proceedings of the 9th ACM/IEEE
International Conference on Cyber-Physical Systems (ICCPS2018), Porto (aka Oporto), Portugal,
Apr. 2018.

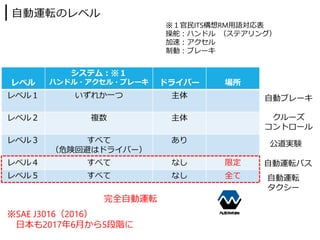
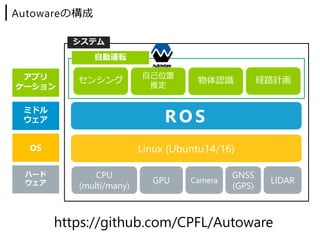
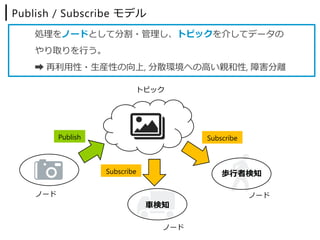
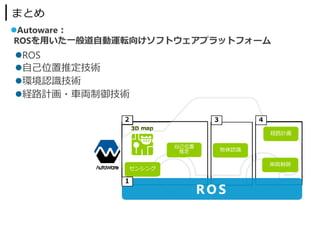
![ROS の 特⻑
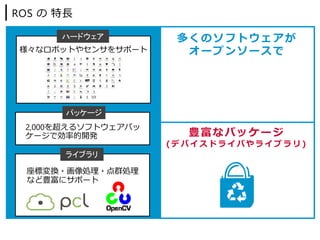
視覚化・シミュレーション 豊富なパッケージ
( デ バ イ ス ド ラ イ バ や ラ イ ブ ラ リ )
分散システム 抽象化
User Code
R O S
Hardware
簡単にシステム状態を視覚化可能
[再⽣データ]
記録したセンサデータ(rosbag
ファイル)
指定した値のデータ
RViz:3D視覚化ツール
実データ(トピック情報)を保存可能
データの保存︓rosbag](https://image.slidesharecdn.com/ros0428public-180428075324/85/Autoware-ROS-15-320.jpg)



















![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)


















![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)





























