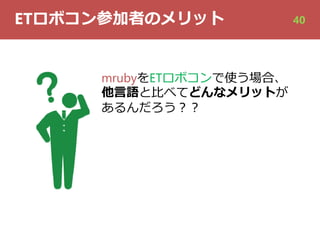
概要 4
# TheGreeter class
class Greeter
def initialize(name)
@name = name.capitalize
end
def salute
puts "Hello #{@name}!“
end
end
# Create a new object
g = Greeter.new("world")
# Output "Hello World!“
g.salute
Rubyとは…
オープンソースの動的なプログラミング⾔語
シンプルさと⾼い⽣産性を備える。
エレガントな⽂法、⾃然に読み書きができ
る。
参考︓https://www.ruby-lang.org/ja/



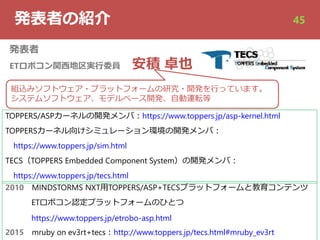
![メリット 13
クラスライブラリが充実している
=細かい処理をライブラリに任せることにより、
ソフトの振る舞いをシンプルに記述できる
例えば、プログラムでしばしば(︖)登場する
「2つの配列を連結する処理」
1 2 4 5 3+ = 1 2 4 5 3
Rubyであれば
result = [1, 2, 4] + [5, 3]
と書くだけ︕](https://image.slidesharecdn.com/mrubyev3-150728101557-lva1-app6891/85/mruby-EV3-13-320.jpg)
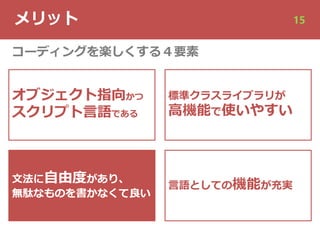
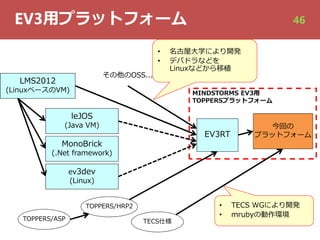
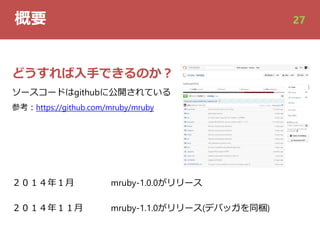
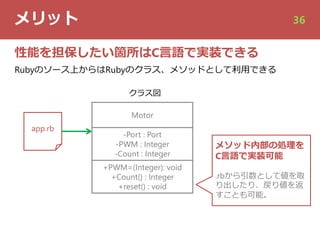
![メリット 16
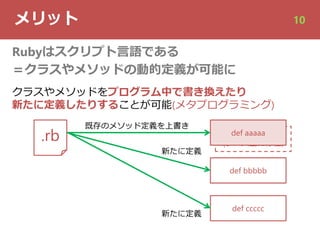
無駄なものを書かなくて良い
=コード量を少なくすることができる
nums = [8, 6, 3, 7, 1]
nums.sort!
int nums[5] = {8, 6, 3, 7, 1}
int i, j, tmp;
for(i = 0 ; i < 5 ; i++) {
for(j = 4 ; j > i ; j--) {
if(nums[j – 1] > nums[j]) {
tmp = nums[j - 1];
nums[j - 1] = nums[j];
nums[j] = tmp
}
}
}
例︓配列に格納した数値をソートする処理
Rubyでの実装例 C⾔語での実装例
数字を昇順に並べ替えるだけにも
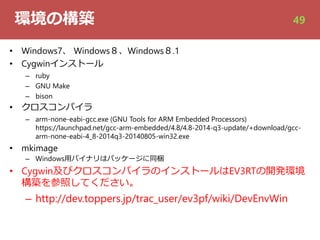
かかわらず、気を遣う点が多すぎる](https://image.slidesharecdn.com/mrubyev3-150728101557-lva1-app6891/85/mruby-EV3-16-320.jpg)
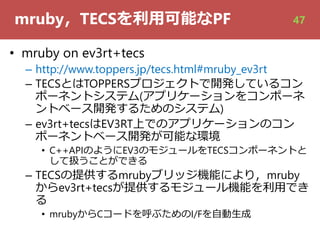
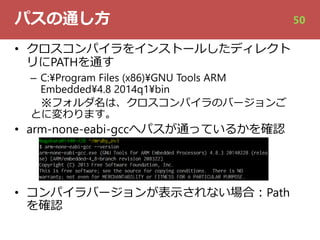
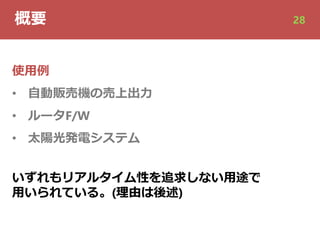
![メリット 19
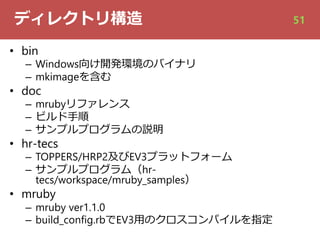
リテラルが充実
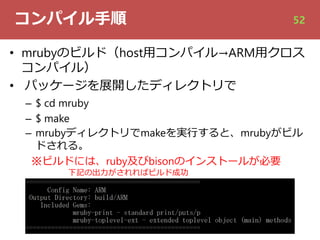
宣⾔したらそれがObjectとなる。(newは不要)
1 => Integer 1.to_s =>”1”
“abc” => String “abc”.length => 3
[1, 2, 3] => Array [1, 2, 3].sum => 6
{:a => 1, :b => 2, :c => 3} =>Hash
1..3 => Range
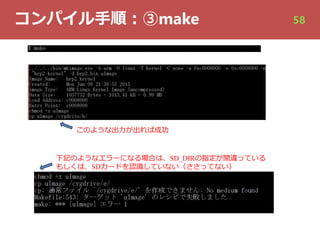
:a => Symbol](https://image.slidesharecdn.com/mrubyev3-150728101557-lva1-app6891/85/mruby-EV3-19-320.jpg)


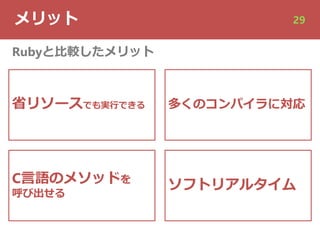

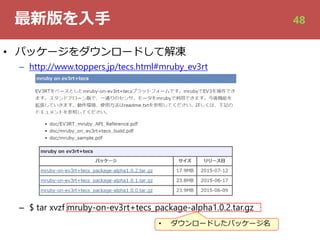
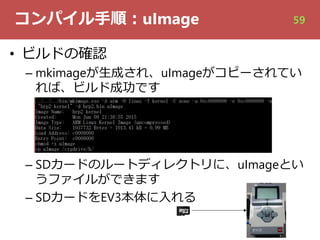
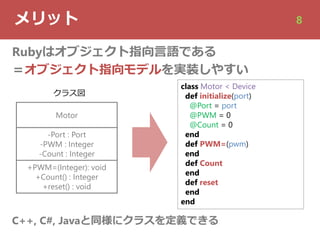
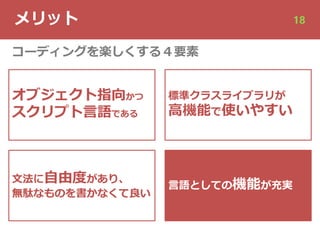
![メリット 38
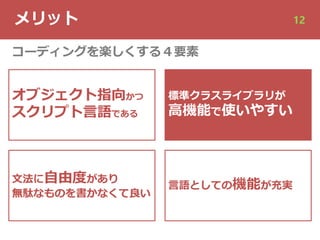
ソフトリアルタイムシステムとして動作
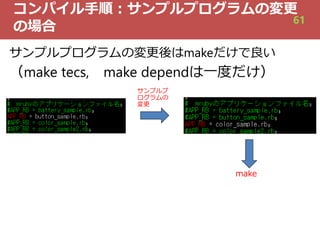
⼤抵の場合は⼀定時間内に処理を完了するが、稀に処理時間がかかる
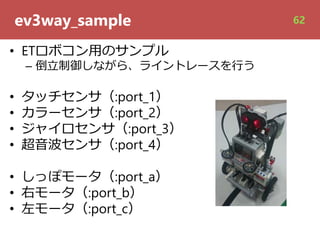
→mruby VM中でガベージコレクションが動作するため。
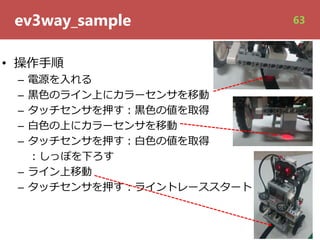
0
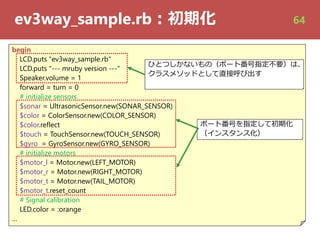
10
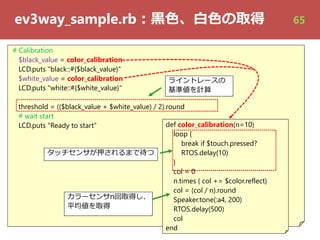
20
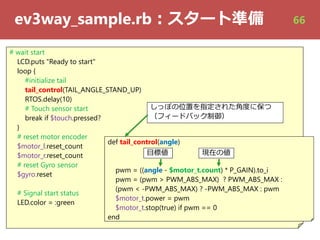
30
40
50
60
0 1 2 3 4 5 6 7 8
出現回数[回]
処理時間[ms]
事象に対する処理時間分布
※このグラフは実測値ではありません。
⼤抵は、
4[ms]以内に処理できる
時々、処理が⻑引く](https://image.slidesharecdn.com/mrubyev3-150728101557-lva1-app6891/85/mruby-EV3-38-320.jpg)
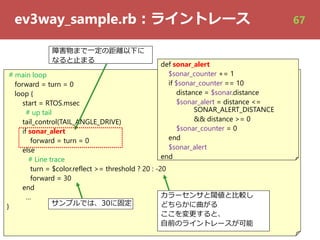
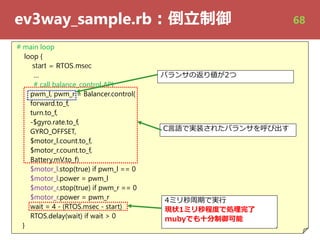
![EV3でmrubyを動かしてみる
[演習]実際に使ってみましょう︕
44
資料作成協⼒者
⽯川 拓也(名古屋⼤学)
⻑原 裕希(⽴命館⼤学)
⻑⾕川 涼(⼤阪⼤学)](https://image.slidesharecdn.com/mrubyev3-150728101557-lva1-app6891/85/mruby-EV3-44-320.jpg)