More Related Content

PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~ 
PDF
![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜 
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用 
PDF
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム 
PDF
object detection with lidar-camera fusion: survey (updated) 
PDF

PPTX
画像処理ライブラリ OpenCV で 出来ること・出来ないこと What's hot

PPTX

PDF

PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日 
PDF
Cartographer と Autoware を用いた自律走行 
PDF

PDF
論文紹介"DynamicFusion: Reconstruction and Tracking of Non-‐rigid Scenes in Real... 
PPTX
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜 
PDF
![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~ ![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜 
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション 
PDF

PDF
CPU / GPU高速化セミナー!性能モデルの理論と実践:実践編 
PDF
cvpaper.challenge 研究効率化 Tips 
PPTX
物体検出の歴史(R-CNNからSSD・YOLOまで) 
PDF

PDF
最近のディープラーニングのトレンド紹介_20200925 
PDF
PPTX
SegFormer: Simple and Efficient Design for Semantic Segmentation with Transfo... 
PDF
Similar to Autowareの紹介と物体検出

PDF
Mobilitydev2019 10 31_slideshare 
PDF
Tier Ⅳ Tech Meetup #1 - 世界初オープンソースの自動運転ソフトウェア「Autoware」ができること & 開発秘話 - 
PDF
i-Cart miniを対象としたつくばチャレンジ用ソフトウェアパッケージの開発 
PDF
IoTの社会応用への展望とその課題 : AI技術とIoT 
PDF

PDF

PDF
Self-Driving System with IoT 
PDF

PDF
2020年10月29日 プロフェッショナルAI×Roboticsエンジニアへのロードマップ 
PDF
Tier Ⅳ Tech Meetup #2 - 自動運転を作るのはCloudシステムの集合体?? 活用技術を大解剖 - 
PPTX
【日商USA】webinar 2023.10.6 クラウドだけじゃない!Edge AIの進化とは? 
PDF
ITエンジニアこそ実現できるモビリティのサービス化 
PPTX
A use case of aws in de na automotive 
PPTX

PDF

PDF
ロボットについて (ロボットのソフトウェア的側面と分散モジュール開発) 
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】 
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】 Autowareの紹介と物体検出
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
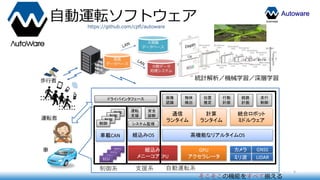
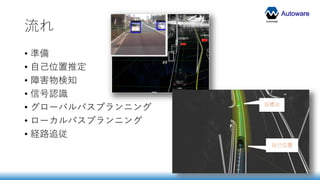
Autoware
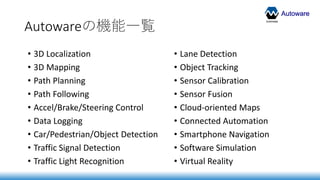
Autowareの機能一覧
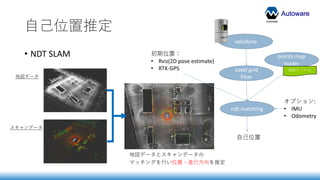
• 3D Localization
•3D Mapping
• Path Planning
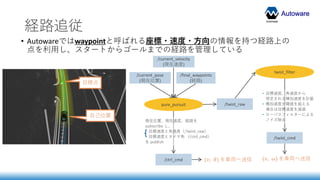
• Path Following
• Accel/Brake/Steering Control
• Data Logging
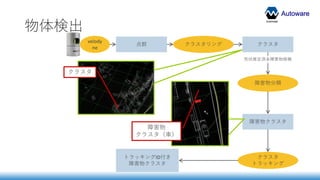
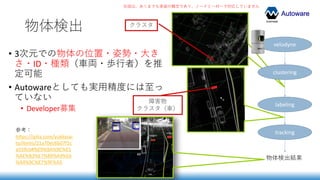
• Car/Pedestrian/Object Detection
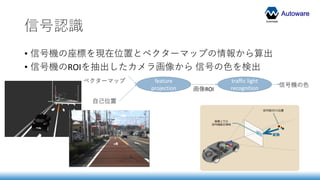
• Traffic Signal Detection
• Traffic Light Recognition
• Lane Detection
• Object Tracking
• Sensor Calibration
• Sensor Fusion
• Cloud-oriented Maps
• Connected Automation
• Smartphone Navigation
• Software Simulation
• Virtual Reality
- 7.
- 8.
Autoware
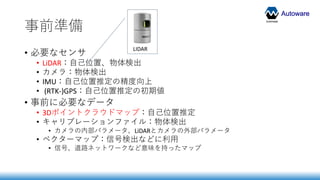
事前準備
• 必要なセンサ
• LiDAR:自己位置、物体検出
•カメラ:物体検出
• IMU:自己位置推定の精度向上
• (RTK-)GPS:自己位置推定の初期値
• 事前に必要なデータ
• 3Dポイントクラウドマップ:自己位置推定
• キャリブレーションファイル:物体検出
• カメラの内部パラメータ、LiDARとカメラの外部パラメータ
• ベクターマップ:信号検出などに利用
• 信号、道路ネットワークなど意味を持ったマップ
LIDAR
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
Autoware
最後に
• Autoware :https://github.com/CPFL/Autoware
• 開発者Slack:https://autoware.herokuapp.com/
みなさんの研究成果などのコミットお待ちしています
Editor's Notes
- #16 車両制御信号 (𝑣, 𝜔) or (𝑣, 𝜃) : 𝑣 …速度、 𝜔 …角速度、 𝜃…タイヤ角