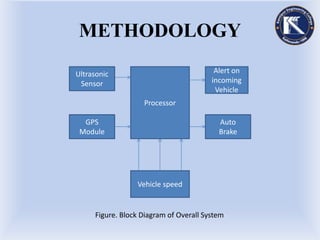
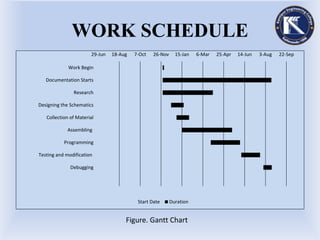
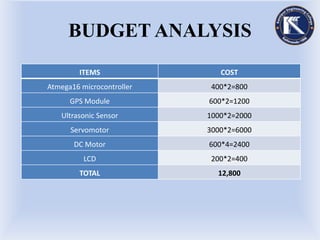
This document is a project proposal for a vehicle collision prevention system created by four students at Kantipur Engineering College. It includes an introduction describing the system's use of GPS and ultrasonic sensors to detect vehicles and obstacles to automatically stop a vehicle if danger is detected. The objectives, features, system requirements, methodology, application, expected outputs, work schedule, and budget analysis are then outlined. References are provided at the end.