This document announces a seminar on using GPUs for parallel processing. The talk will be given by A. Stephen McGough and is part of the Sci-Prog seminar series on computing and programming topics ranging from basic to advanced levels. More information can be found on the website and researchers can contact Matt Wade to access the research community site. Announcements are sent via the sci-prog-seminars mailing list. The seminar is organized by several doctors and an individual.




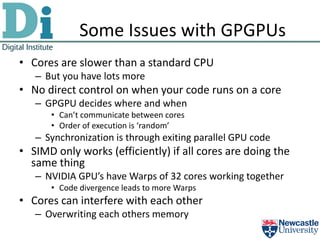


![Example: Vector Addition
• Pseudo code for the kernel:
– Identify which element in the vector I’m computing
•i
– Compute C[i] = A[i] + B[i]
• How do we identify our index (i)?](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-11-320.jpg)



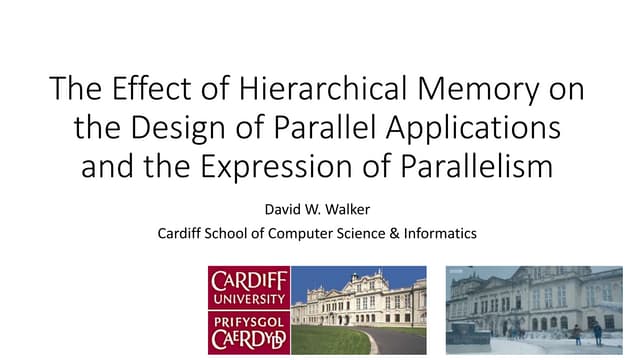
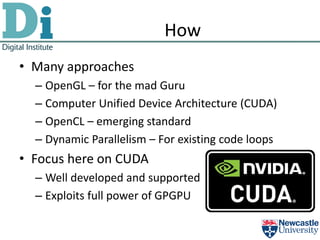
![Example: Vector Addition
Kernel code
Entry point for a
Normal function
kernel
definition
__global__ void vector_add(double *A, double *B,
double* C, int N) {
// Find my thread id - block and thread
int id = blockDim.x * blockIdx.x + threadIdx.x;
if (id >= N) {return;} // I'm not a valid ID
C[id] = A[id] + B[id]; // do my work
} Compute my
absolute thread id
We might be
invalid – if
data size not Do the work
completely
divisible by
blocks](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-15-320.jpg)


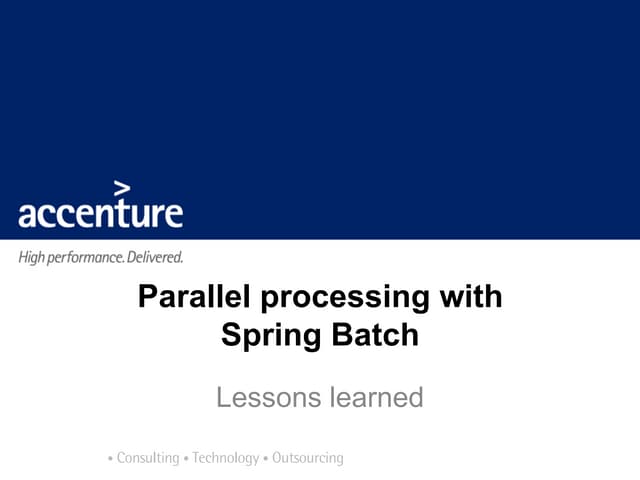
![Example: Vector Addition
int N = 2000;
double *A_host = new double[N]; // Create data on host computer
double *B_host = new double[N]; double *C_host = new double[N];
for(int i=0; i<N; i++) { A_host[i] = i; B_host[i] = (double)i/N; }
double *A_device, *B_device, *C_device; // allocate space on device GPGPU
cudaMalloc((void**) &A_device, N*sizeof(double));
cudaMalloc((void**) &B_device, N*sizeof(double));
cudaMalloc((void**) &C_device, N*sizeof(double));
// Copy data from host memory to device memory
cudaMemcpy(A_device, A_host, N*sizeof(double), cudaMemcpyHostToDevice);
cudaMemcpy(B_device, B_host, N*sizeof(double), cudaMemcpyHostToDevice);
// How many blocks will we need? Choose block size of 256
int blocks = (N - 0.5)/256 + 1;
vector_add<<<blocks, 256>>>(A_device, B_device, C_device, N); // run kernel
// Copy data back
cudaMemcpy(C_host, C_device, N*sizeof(double), cudaMemcpyDeviceToHost);
// do something with result
// free device memory
cudaFree(A_device); cudaFree(B_device); cudaFree(C_device);
free(A_host); free(B_host); free(C_host); // free host memory](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-18-320.jpg)


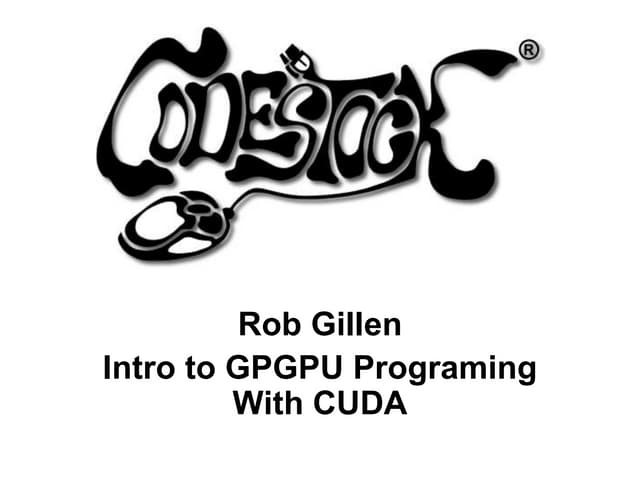
![Faking 2D data
• 2D data size N*M
• Define 1D array of size N*M
• Index element at [x,y] as
x*N+y
• Then can transfer to device in one go
Row 1 Row 2 Row 3 Row 4](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-21-320.jpg)
![Example: Matrix Add
Kernel
__global__ void matrix_add(double *A, double *B, double* C, int N, int M)
{
// Find my thread id - block and thread
Both
int idX = blockDim.x * blockIdx.x + threadIdx.x;
dimensions
int idY = blockDim.y * blockIdx.y + threadIdx.y;
if (idX >= N || idY >= M) {return;} // I'm not a valid ID
int id = idY * N + idX;
Get both
C[id] = A[id] + B[id]; // do my work
dimensions
}
Compute
1D location](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-22-320.jpg)
![Example: Matrix Addition
Main Code
int N = 20;
int M = 10;
double *A_host = new double[N * M]; // Create data on host computer
double *B_host = new double[N * M];
double *C_host = new double[N * M]; Define matrices
for(int i=0; i<N; i++) {
for (int j = 0; j < M; j++) {
on host
A_host[i + j * N] = i; B_host[i + j * N] = (double)j/M;
}
}
double *A_device, *B_device, *C_device; // allocate space on device GPGPU
cudaMalloc((void**) &A_device, N*M*sizeof(double));
Define space on
cudaMalloc((void**) &B_device, N*M*sizeof(double)); device
cudaMalloc((void**) &C_device, N*M*sizeof(double));
// Copy data from host memory to device memory
cudaMemcpy(A_device, A_host, N*M*sizeof(double), cudaMemcpyHostToDevice);
cudaMemcpy(B_device, B_host, N*M*sizeof(double), cudaMemcpyHostToDevice);
Copy data to
device
// How many blocks will we need? Choose block size of 16
int blocksX = (N - 0.5)/16 + 1;
int blocksY = (M - 0.5)/16 + 1;
dim3 dimGrid(blocksX, blocksY);
dim3 dimBlocks(16, 16); Run Kernel
matrix_add<<<dimGrid, dimBlocks>>>(A_device, B_device, C_device, N, M);
// Copy data back from device to host
cudaMemcpy(C_host, C_device, N*M*sizeof(double), cudaMemcpyDeviceToHost); Bring data back
// Free device
//for (int i = 0; i < N*M; i++) printf("C[%d,%d] = %fn", i/N, i%N, C_host[i]);
cudaFree(A_device); cudaFree(B_device); cudaFree(C_device);
free(A_host); free(B_host); free(C_host); Tidy up](https://image.slidesharecdn.com/cuda-02-130109104746-phpapp02/85/Using-GPUs-for-parallel-processing-23-320.jpg)