A Proposal toAdd an Extensible Random
Number Facility to the Standard Library
(Revision 2) http://www.open-std.org/jtc1/sc22/wg21/docs/papers/2003/n1452.html
const auto x= 5; // const int
vector<vector<int>> vv(10);
auto a = vv[0]; // vector<int>
auto& b = vv[0]; // vector<int>&
const auto& c = vv[0]; // const vector<int>&
auto [4/4]
const 修飾や参照の宣言
struct Team {
enum{ Red, White };
};
struct Palette {
enum { Red, Green, Blue };
};
従来の enum の問題点 [2/2]
名前の衝突を防ぐために
スコープを作る必要がある
78.
enum class name: type {
enumerator = constexpr,
enumerator = constexpr, ...
};
enum struct name : type {
enumerator = constexpr,
enumerator = constexpr, ...
};
enum class [1/4]
強い型付けとスコープを持つ列挙型
79.
enum class Team{ Red, White };
enum class Month {
January = 1, February, ...
};
enum class Align : char {
Left = 'L',
Center = 'C',
Right = 'R',
};
enum class [2/4]
80.
enum class Team{ Red, White };
enum class Palette { Red, Green, Blue };
const Team team = Team::Red;
switch (palette) {
case Palette::Red : break;
case Palette::Green : ...
}
enum class [3/4]
列挙型名のスコープを持つ
81.
void SetColor(unsigned);
enum classTeam { Red, White };
const unsigned red = 0xffFF0000;
SetColor(red);
SetColor(Team::Red); // error
const int white = Team::White; // error
enum class [4/4]
整数型へ暗黙的に変換されない
82.
enum class はenum の強化版で、強い型付
けとスコープを持つ
enum class を使えば、整数型への暗黙的な
変換や、列挙子の名前の衝突を防げる
復習
const int a= 5, b = 10, c = 50, d = 20;
const int smallest
= min(min(min(a,b),c),d); // 5
const int largest
= max(max(max(a,b),c),d); // 50
最小/最大値の取得
3 つ以上の変数に対しては
何重もの min() / max() が必要
131.
const int a= 5, b = 10, c = 50, d = 20;
const int smallest
= min({ a, b, c, d }); // 5
const int largest
= max({ a, b, c, d }); // 50
最小/最大値の取得
initializer-list で複数の値を渡す
132.
int a =25, b = 30;
const int smaller = min(a,b); // 25
const int larger = max(a,b); // 30
最小/最大値を同時に取得
min() と max() で比較演算が 2 回必要
133.
int a =25, b = 30;
// results は pair<int,int> 型
const auto results = minmax(a,b);
const int smaller = results.first; // 25
const int larger = results.second; // 30
最小/最大値を同時に取得
minmax() で比較演算が 1 回に
134.
int a[100]; //{0,1,2,3,...} で初期化したい
vector<int> v(50); // {1000,1001,...}
for (int i=0; i<100; ++i)
a[i] = i;
for (size_t i=0; i<v.size(); ++i)
v[i] = i + 1000;
配列に連続した値を代入
ループが必要







![mt19937 rng;
for (int i=0; i<10; ++i)
cout << rng() << '¥n';
乱数エンジン [1/3]
メルセンヌ・ツイスター法による乱数生成](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-22-320.jpg)
![mt19937 rng(123456);
for (int i=0; i<10; ++i)
cout << rng() << '¥n';
乱数エンジン [2/3]
乱数のシード値を指定](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-23-320.jpg)
![random_device rng;
for (int i=0; i<10; ++i)
cout << rng() << '¥n';
乱数エンジン [3/3]
ハードウェア・エントロピー・ソースを
基にした予測不能な乱数生成](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-24-320.jpg)

![auto x = 5; // int
auto y = 3.5f; // float
auto z = sin(3.14); // double
// 実際は上記のような単純な場面では
// 読みにくくなるので使うべきでない
auto [1/4]
宣言した変数の型を右辺の
初期化子から静的に推論](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-35-320.jpg)
![vector<int>::iterator i
= max_element(v.begin(),v.end());
map<string,pair<int,string>>::iterator k
= m.find("key");
auto [2/4]
長い型名を省略する](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-36-320.jpg)
![auto [3/4]
長い型名を省略する
auto i = max_element(v.begin(),v.end());
auto k = m.find("key");](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-37-320.jpg)
![const auto x = 5; // const int
vector<vector<int>> vv(10);
auto a = vv[0]; // vector<int>
auto& b = vv[0]; // vector<int>&
const auto& c = vv[0]; // const vector<int>&
auto [4/4]
const 修飾や参照の宣言](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-38-320.jpg)
![int scores[5] = {40,80,90,60,100};
for (auto& score : scores)
score += 10;
for (const auto score : scores)
cout << score << '¥n';
// 50 90 100 70 110
範囲ベース for ループ [1/5]
単純な for ループを短くできる](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-42-320.jpg)
![範囲ベース for ループ [2/5]
イテレーターを返す begin() / end()
メンバ関数を持っていれば使える
vector<int> v;
list<double> li;
string str;
for (auto n : v) cout << n << '¥n';
for (auto x : li) cout << x << '¥n';
for (auto ch : str) cout << ch << '¥n';](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-43-320.jpg)
![vector<Widget> widgets;
for (auto& widget : widgets)
widget.update();
for (const auto& widget : widgets)
widget.draw();
範囲ベース for ループ [3/5]
コピーを避けたい場合は参照で](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-44-320.jpg)
![範囲ベース for ループ [4/5]
二重ループの改善例
double matrix[4][4] = { ... };
for (int i=0; i<4; ++i)
{
for (int k=0; k<4; ++k)
cout << matrix[i][k] << ',';
cout << '¥n';
}](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-45-320.jpg)
![double matrix[4][4] = { ... };
for (const auto& row : matrix)
{
for (const auto elem : row)
cout << elem << ',';
cout << '¥n';
}
範囲ベース for ループ [5/5]
二重ループの改善例](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-46-320.jpg)
![アルゴリズムは便利だ [1/3]
count_if
find_if
remove_if
for_each
generate
sort ...
第 3 引数に関数](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-50-320.jpg)
![bool IsEven(int n) {
return n%2==0;
}
vector<int> v;
// 偶数の要素を数える
size_t x = count_if(v.begin(),v.end(),
IsEven);
アルゴリズムは便利だ [2/3]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-51-320.jpg)
![struct IsEven : unary_function<int,bool> {
result_type operator()
(argument_type n) const {
return n%2==0;
}}; // 関数オブジェクトは関数ポインタより
// インライン化されやすい
vector<int> v;
size_t x = count_if(v.begin(),v.end(),
IsEven());
アルゴリズムは便利だ [3/3]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-52-320.jpg)
{ return n%2==0; });
ラムダ式 [1/4]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-54-320.jpg)
{ return n%2==0; });
ラムダ式 [2/4]
[] () ->T {} で構成される
[] キャプチャリスト
() 引数
->T 戻り値の型(省略可)
{} 関数の本体](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-55-320.jpg)
{ return n%2==0; });
ラムダ式 [3/4]
ラムダ式は、相当する関数オブジェクトを
自動で作る
可読性とパフォーマンスに優れる](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-56-320.jpg)
{ return n*n; };
cout << Square(9) << '¥n'; // 81
ラムダ式で遊ぼう [1/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-57-320.jpg)
{ cout << n*n << '¥n'; };
PrintSquare(100); // 10000
ラムダ式で遊ぼう [2/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-58-320.jpg)
![const int ar[4] = { 1, 2, 3, 4 };
for_each(begin(ar),end(ar),
[](int n){ cout << n*n << ' '; });
// 1 4 9 16
ラムダ式で遊ぼう [3/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-59-320.jpg)
![const int ar[4] = { 1, 2, 3, 4 };
const int x = 10;
for_each(begin(ar),end(ar),
[=](int n){ cout << n*x << ' '; });
// [=] により、ラムダ式内の x は
// 外部からコピーキャプチャ
// 10 20 30 40
ラムダ式で遊ぼう [4/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-60-320.jpg)
![const int ar[4] = { 1, 2, 3, 4 };
int sum = 0;
for_each(begin(ar),end(ar),
[&](int n){ sum += n; });
// [&] により、ラムダ式内の sum は
// 外部から参照キャプチャ
cout << sum << '¥n'; // 10
ラムダ式で遊ぼう [5/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-61-320.jpg)

{ return a.lengthSq()<b.lengthSq(); }
);
ラムダ式で遊ぼう [6/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-62-320.jpg)

{ return enemy.hp < threshold; }),
enemies.end()
);
ラムダ式で遊ぼう [7/7]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-63-320.jpg)

![Emplacement [1/2]
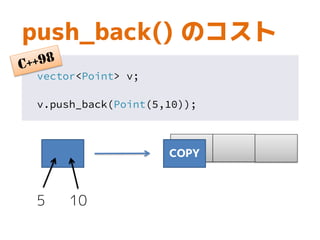
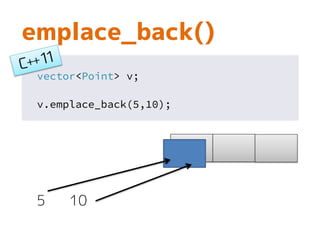
要素のコンストラクタ引数を受け取り、コ
ンテナ内でオブジェクトを構築する
一時オブジェクトのコピーと破棄のコスト
が発生しない
5 10](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-69-320.jpg)
![Emplacement [2/2]
vector, deque, map などのコンテナの
Emplacement 挿入関数
push_back() → emplace_back()
push_front() → emplace_front()
insert() → emplace()](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-70-320.jpg)
![要素追加の使い分け [1/2]
vector<T> などに対して
push_back()
T 型の値 (lvalue / rvalue),
{ initializer-lists }
emplace_back()
それ以外の型,
0 個 もしくは 2 個以上の引数](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-71-320.jpg)
![string GetString();
const string str = "Hello";
vector<string> v;
v.push_back(str);
v.push_back(GetString());
v.push_back({ str[0], 'e'});
v.emplace_back("hello");
v.emplace_back();
v.emplace_back(10,'a');
要素追加の使い分け [2/2]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-72-320.jpg)
![void SetColor(unsigned);
enum Team { Red, White };
const unsigned red = 0xffFF0000;
SetColor(red);
SetColor(Red); // ?
従来の enum の問題点 [1/2]
整数型に暗黙的に変換できるため、
意図しない振る舞いが可能](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-76-320.jpg)
![struct Team {
enum { Red, White };
};
struct Palette {
enum { Red, Green, Blue };
};
従来の enum の問題点 [2/2]
名前の衝突を防ぐために
スコープを作る必要がある](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-77-320.jpg)
![enum class name : type {
enumerator = constexpr,
enumerator = constexpr, ...
};
enum struct name : type {
enumerator = constexpr,
enumerator = constexpr, ...
};
enum class [1/4]
強い型付けとスコープを持つ列挙型](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-78-320.jpg)
![enum class Team { Red, White };
enum class Month {
January = 1, February, ...
};
enum class Align : char {
Left = 'L',
Center = 'C',
Right = 'R',
};
enum class [2/4]](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-79-320.jpg)
![enum class Team { Red, White };
enum class Palette { Red, Green, Blue };
const Team team = Team::Red;
switch (palette) {
case Palette::Red : break;
case Palette::Green : ...
}
enum class [3/4]
列挙型名のスコープを持つ](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-80-320.jpg)
![void SetColor(unsigned);
enum class Team { Red, White };
const unsigned red = 0xffFF0000;
SetColor(red);
SetColor(Team::Red); // error
const int white = Team::White; // error
enum class [4/4]
整数型へ暗黙的に変換されない](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-81-320.jpg)
![配列と array [1/2]
配列はインタフェースが貧弱
const int size = 100;
int ar[size];
for (int i=0; i<size; ++i)
ar[i] = 10 * i;](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-85-320.jpg)
![配列と array [2/2]
<array> ヘッダの array を使おう
array<int,100> ar;
for (size_t i=0; i<ar.size(); ++i)
ar[i] = 10 * i;](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-86-320.jpg)
![array [1/2]
通常の配列にコンテナのインタフェースを
与えたラッパー
size(), at(), begin(), end(), fill()
などのメンバ関数を提供
サイズはコンパイル時に決まり、パフォー
マンスは通常の配列と変わらない](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-87-320.jpg)
![array [2/2]
array<int,5> a = { 5, 10, 15, 20, 25 };
array<int,5> b;
b.fill(100); // 要素を全部 100 に
a = b; // 要素数が同じなら代入可能
a[0] = 0;
for (const auto n : a)
cout << n << '¥n';](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-88-320.jpg)
![ヌルポインタ [1/3]
NULL
#define NULL 0
と定義される、単なる数値の 0
nullptr
あらゆるポインタ型のヌルポインタを
表すポインタ定数のキーワード
整数には変換できない
C++98](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-92-320.jpg)
![ヌルポインタ [2/3]
NULL はトラブルの元
void f(int n);
void f(const char* s);
f(0);
f("hello");
f(NULL); // f(int)](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-93-320.jpg)
![ヌルポインタ [3/3]
nullptr でオーバーロードを正確に
void f(int n);
void f(const char* s);
f(0);
f("hello");
f(nullptr); // f(const char*)](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-94-320.jpg)
![vector<int> GetVector();
void GetVector(vector<int>& v);
vector<int> v
= GetVector(); // コピーが発生
GetVector(v); // ok
右辺値参照と Move [1/5]
むかーしむかし、大きなオブジェクトを返
す関数は御法度だった](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-98-320.jpg)
![vector<int> GetVector();
void GetVector(vector<int>& v);
vector<int> v = GetVector(); // ok
GetVector(v); // ok
右辺値参照と Move [2/5]
今はそんなことはない](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-99-320.jpg)
![右辺値参照と Move [3/5]
ptr1
ptr2
コピー完了後に破棄
コピー
これまで
C++98](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-100-320.jpg)
![右辺値参照と Move [4/5]
ptr1
ptr1
所有権を移動
(Move セマンティクス)
これから
nullptr](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-101-320.jpg)
![右辺値参照と Move [5/5]
右辺値
名前のない一時オブジェクト
右辺値参照 (Type&& x)
右辺値を受け取るオーバーロード
std::move() 関数
左辺値を右辺値にキャスト](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-102-320.jpg)
![さらば new と delete [1/5]
new と delete は危険
int* pArray = new int[10000];
delete[] pArray; // 取扱注意](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-108-320.jpg)
![さらば new と delete [2/5]
動的配列は vector か string
vector<int> v(10000);
string str;](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-109-320.jpg)
![さらば new と delete [3/5]
単一のデータのポインタは・・・
Enemy* pEnemy = new Boss;
delete pEnemy;](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-110-320.jpg)
![さらば new と delete [4/5]
スマートポインタを使う
shared_ptr<Enemy> pEnemy = new Boss;
// 自動的に delete してくれる
// まだ最適化可能](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-111-320.jpg)
![unique_ptr<Enemy> pEnemy = new Boss;
// 自動的に delete してくれる
さらば new と delete [5/5]
ポインタをコピーしない場合、
unique_ptr を使えばゼロオーバーヘッド](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-112-320.jpg)
![補助関数 [1/2]
スマートポインタは補助関数で作ろう
make_shared<T>
オブジェクトと管理用データを一緒に
連続領域に new するので効率的
make_unique<T>
名前の一貫性、new の記述が不要に](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-113-320.jpg)
![補助関数 [2/2]
shared_ptr<Enemy> pEnemy
= make_shared<Boss>();
unique_ptr<Enemy> pEnemy2
= make_unique<Boss>();](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-114-320.jpg)
![Transparent operator
functors
vector<unsigned> v { 10, 50, 20, 30 };
sort(v.begin(),v.end(),greater<>());
比較・算術用クラステンプレート
[less, greater, plus, multiplies …] を
テンプレート実引数なしで使える](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-119-320.jpg)
![配列の範囲
int a[] = { 5, 3, 6, 8, 2 };
const int size = sizeof(a)/sizeof(a[0]);
sort(a,a+size);
int a[] = { 5, 3, 6, 8, 2 };
sort(begin(a),end(a));](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-124-320.jpg)
![int a[100]; // {0,1,2,3,...} で初期化したい
vector<int> v(50); // {1000,1001,...}
for (int i=0; i<100; ++i)
a[i] = i;
for (size_t i=0; i<v.size(); ++i)
v[i] = i + 1000;
配列に連続した値を代入
ループが必要](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-134-320.jpg)
![int a[100]; // {0,1,2,3,...}
vector<int> v(50); // {1000,1001,...}
iota(begin(a),end(a),0);
iota(v.begin(),v.end(),1000);
配列に連続した値を代入
iota() アルゴリズムを使おう](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-135-320.jpg)
![const int maxVal = 500; // 500円まで
bool ruleKept = true;
for (size_t i=0; i<v.size(); ++i) {
if (v[i] > maxVal) {
ruleKept = false;
break;
}
}
全要素の条件チェック
ループが必要](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-136-320.jpg)
{ return n<=maxVal; });
全要素の条件チェック
all_of() アルゴリズムを使おう](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-137-320.jpg)
{ return n>maxVal; });
const bool ruleKept
= none_of(v.begin(),v.end(),
[=](int n){ return n>maxVal; });
全要素の条件チェック
文脈に応じて any_of() ,
none_of アルゴリズムも使おう](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-138-320.jpg)
![const auto start = chrono::system_clock::now();
// 何らかの処理
const auto end = chrono::system_clock::now();
const chrono::duration<double> elapsed
= end - start;
cout << "経過時間: " << elapsed.count() << "秒¥n";
<chrono> [1/2]
時間の測定](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-143-320.jpg)
![const chrono::minutes min(5);
const chrono::seconds sec(15);
// 型は std::chrono::seconds
const auto result = min + sec;
cout << result.count() << '¥n'; // 315
<chrono> [2/2]
時間の計算と単位の変換](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-144-320.jpg)
![string s = "Hello C++11, C++14 & C++1y!";
const regex e("C¥¥+¥¥+[0-9][0-9a-z]");
smatch m;
while (regex_search(s,m,e)) {
cout << m[0] << '¥n';
s = m.suffix().str();
} // C++11 C++14 C++1y
<regex> [1/2]
正規表現にマッチする文字列の検索](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-145-320.jpg)
![const string s = "C++11, C++14 and C++1y";
const regex e("¥¥d");
cout << regex_replace(s,e,"[$&]") << '¥n';
// C++[1][1], C++[1][4] and C++[1]y
<regex> [2/2]
正規表現を使った文字列の置換](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-146-320.jpg)
![unordered_map<string,int> m {
{ "C++98", 1998 },
{ "C++11", 2011 }
};
m.emplace("C++14",2014);
cout << m["C++11"] << '¥n'; // 2011
<unordered_map>
O(1) で要素にアクセスできる、
ハッシュを使った非順序 map](https://image.slidesharecdn.com/c11c14-130915050201-phpapp02/85/C-11-C-14-149-320.jpg)















































![[ICLR2017読み会 @ DeNA] ICLR2017紹介](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2017denaiclr2017-170616173153-thumbnail.jpg?width=640&height=640&fit=bounds)































