This thesis describes the implementation of simultaneous localization and mapping (SLAM) on a differential drive autonomous ground vehicle (AGV). The AGV was designed and built with 3D printing. It uses a laser scanner and motor encoders for localization. Various SLAM algorithms like RANSAC, split and merge were tested for landmark extraction from laser data. An extended Kalman filter is used to estimate the robot's pose and map landmarks. Testing showed the robot could map an area but the loop closure problem was not solved, resulting in drift over time.




![1 INTRODUCTION
1 Introduction
The University of Agder wants to automate mapping of areas for the use of robots, and has decided to start this
project, namely UiA SLAM. SLAM is an acronym for simultaneous localization and mapping and is a technique
for building a map of an unknown environment while at the same time determine own position. This could be used
for self-driving cars, autonomous cleaning robots and electronic service dogs among others.
Imagine a person waking up in an unknown location. They will start looking around for familiar signs. Once the
person observes a landmark, they can figure out where they are in relation to it. The more the person observes of
the environment, the better the person’s mental image of the place will be. The same applies for a SLAM robot.
It tries to map an unknown environment while figuring out its position. When it starts, it is just like waking up
at an unknown location without any prior knowledge about the place. The complexity comes from doing both
localization and mapping at once.
It is essentially a chicken-and-egg problem. The robot needs to know its position before answering the question of
what the environment looks like. The robot also has to figure out its position without the benefit of already having
a map.
Two required components for SLAM is a motion sensor and a range sensor. The robot needs to have a good
odometry performance. Odometry is the use of motion sensors to estimate its change in position over time. There
is normally a small margin of error with odometry readings. The odometry readings are not absolute and the error
makes the estimated position drift over the time. A range sensor also needs to be present to sense the sorroundings.
The most common range sensors in a SLAM context is a laser scanner such as a LIDAR. A robot determines its
position through a sensor fusion technique as the complementary filter or the Kalman filter. It will use the odometry
in combination with landmarks extracted from the range measurement device. Landmarks are distinct and static
features in the environment. A robot also needs to be able to identify and associate an observed landmark with a
landmark observed earlier.
SLAM is the mapping of an environment using the continual interplay between the mapping device, the robot
and its position. As the robot interacts with the environment, it maps the area and determines its own position
simultaneously. SLAM is a tool for exploring the environment around the robot and is constantly undergoing
improvement. [1]
8](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-8-2048.jpg)
![2 THEORY
2 Theory
Simultaneous Localization and Mapping is a field in robotics concerned about the navigation of a robot in a unknown
environment. The problem is divided into the four following parts: Landmark extraction, data association, state
estimation, and state update.
2.1 Locomotion
Ever since its invention the actively powered wheel has been the go-to locomotion mechanism utilized for unbounded
movement on flat surfaces. Needless to say, this is how the SLAM platform in this paper will be locomoted.
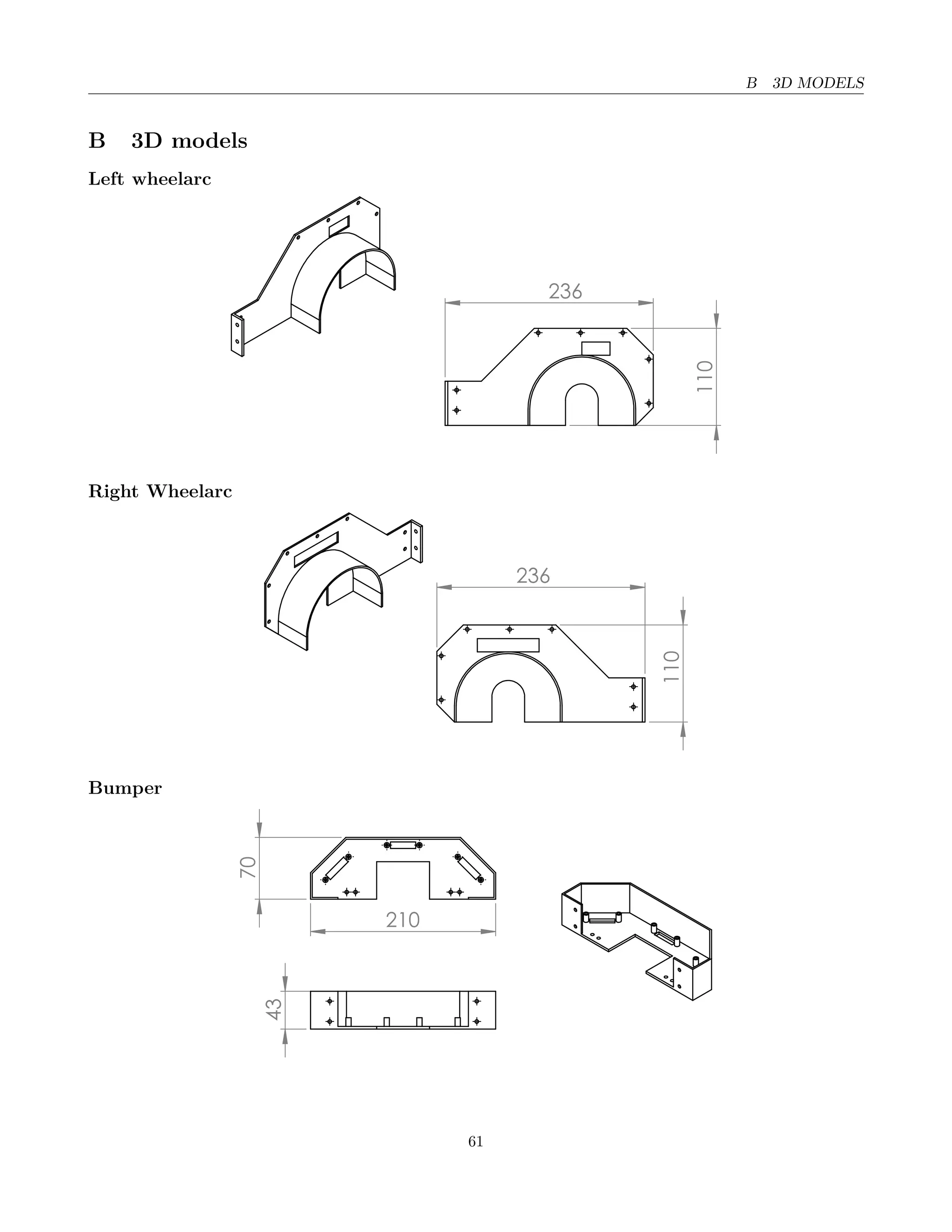
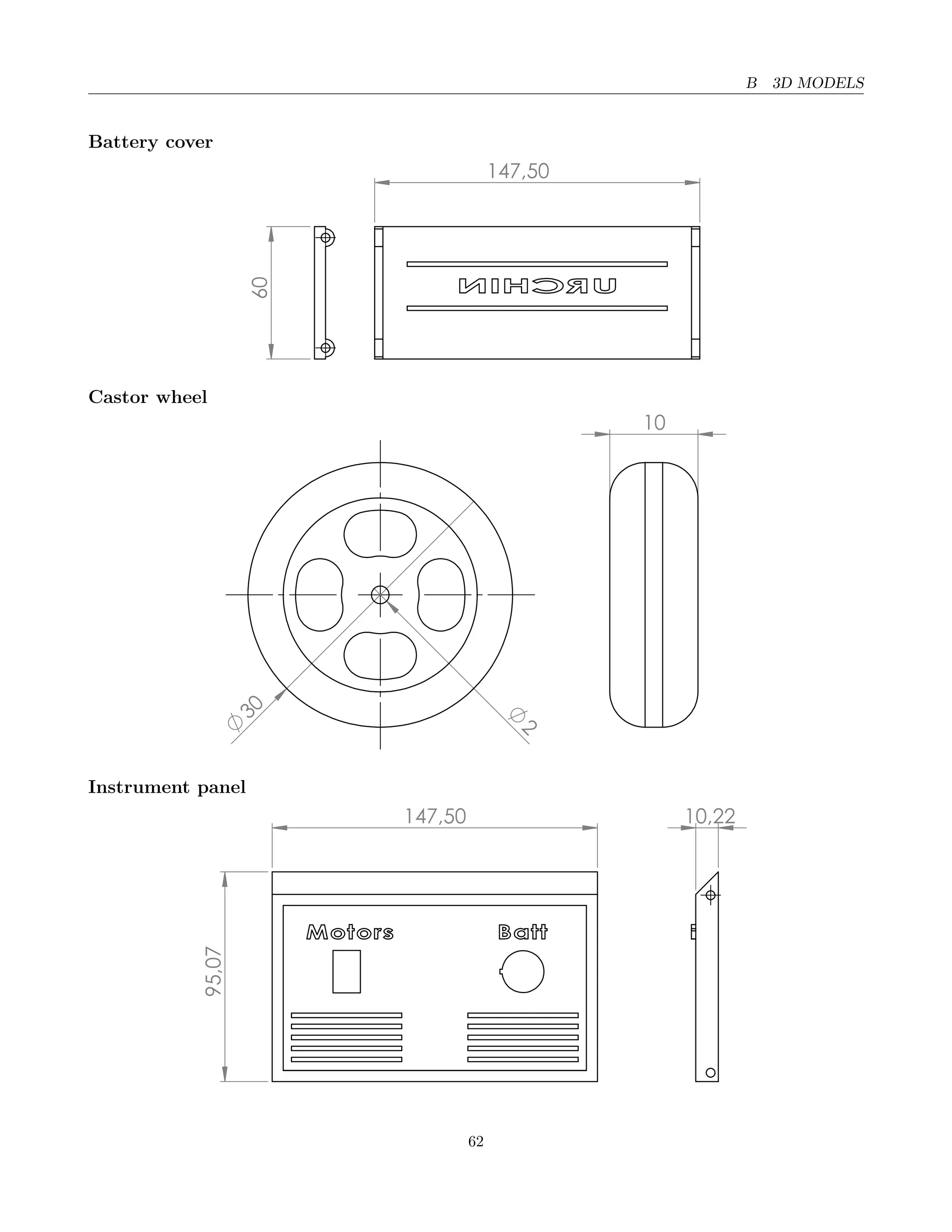
Our specific implementation is a 3-wheeled differential drive system as depicted in figure 1. Where two independent
actively powered wheels are dedicated to locomotion while a third passive castor wheel tags along. This gives us
three points of contact with the ground, resulting in great stability.
The drive wheels are of the standard type of wheels offering two degrees of freedom, rotation about the wheels axle
and rotation about the wheels contact point with the underlying surface. The castor wheel also offers two degrees
of freedom, rotation about its free running axle and rotation around an offset steering joint.
2.2 Kinematics
2.2.1 Kinematics
Gy
Gx
θ
Rx
Ry
Figure 1: Global coordinate system and reference frame for the robot.
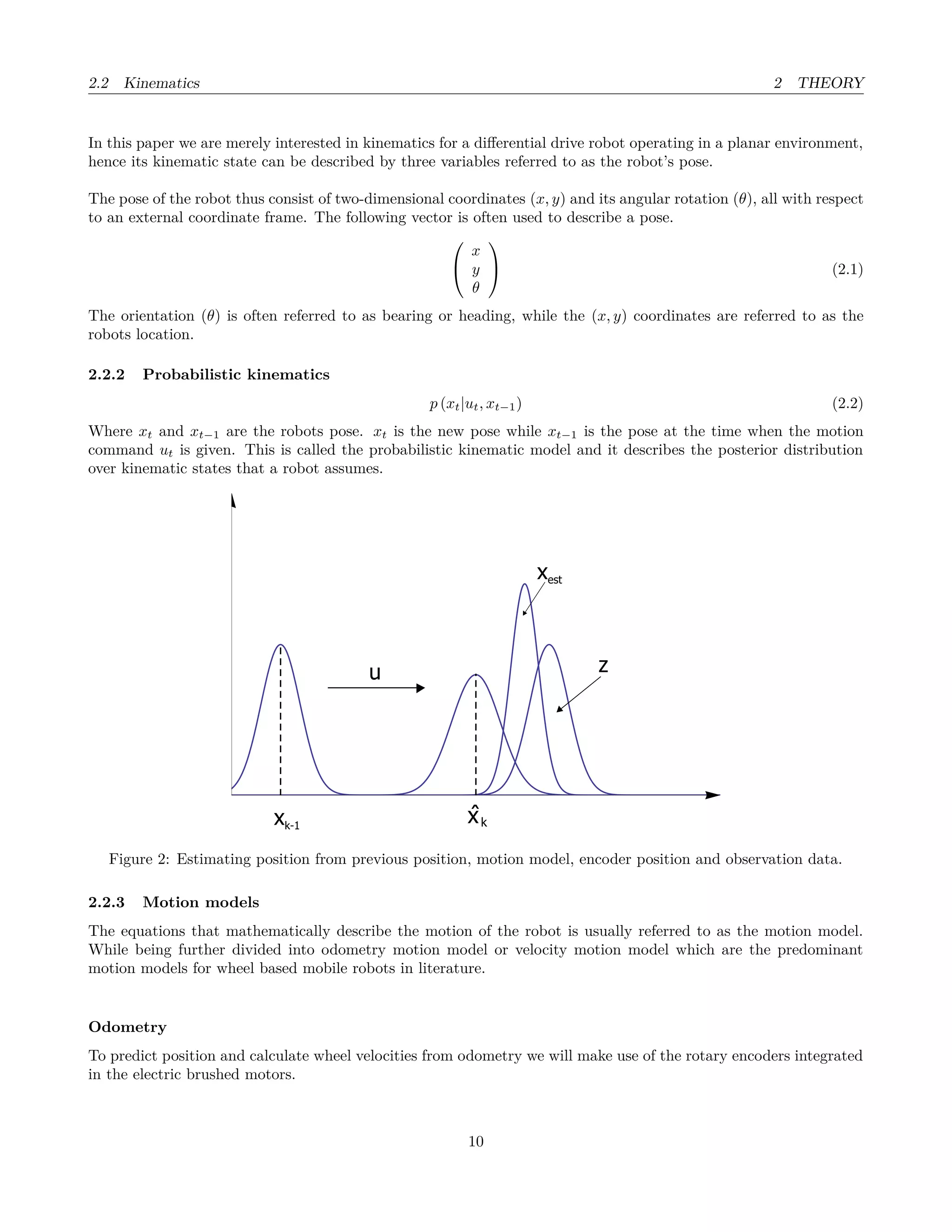
Kinematics describe the effect of control actions on the configuration of a robot. The configuration of a rigid mobile
robot is commonly described by six variables, its three-dimensional Cartesian coordinates and its three Euler angles
(roll, pitch, yaw) relative to an external coordinate frame. [2]
9](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-9-2048.jpg)
![2.4 SLAM with complementary filter 2 THEORY
ˆx = a · S1 + (1 − a) · S2 0 < a < 1 (2.6)
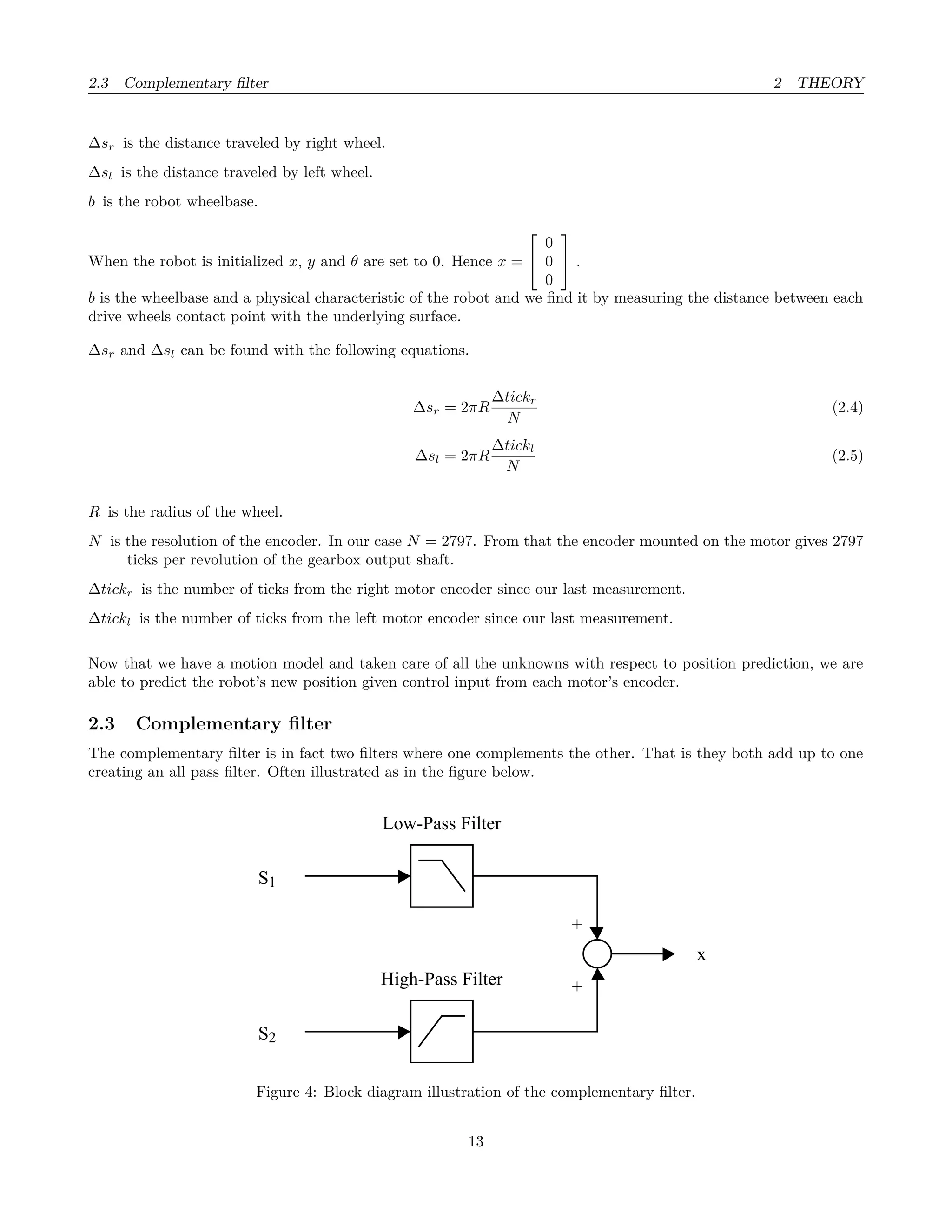
S1 and S2 are noisy measurements of the variable x. Most often the complementary filter is configured in such a way
that we get a low-pass filter on one measurement and a high-pass filter on the second measurement, resulting in an
all-pass filter giving the estimation ˆx. When the low-pass and high-pass filter are mathematical complements of each
other we get a complete reconstruction of the variable being sensed minus the noise related to each measurement.
[3]
2.4 SLAM with complementary filter
Because there are multiple ways to implement SLAM, this will be but one simple example employing wheel encoders
and a LIDAR. The basic steps that has to be performed are the prediction step and the update step. During the
prediction step the AGV calculates its position and orientation solely from encoder data. When landmarks have
been detected the update step is performed to further refine the accuracy of robot position as well as update
information regarding landmarks. Our example algorithm can be described in pseudo code in figure 5.
14](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-14-2048.jpg)

![2.5 Extended Kalman filter 2 THEORY
• Calculate pose estimate by use of control input and the motion model for our system. In this case we use the
encoder based motion model for a differential drive robot.
Update step:
• If there are no landmarks detected this iteration, meaning the measurement vector (z) is empty, then this
step is omitted.
• If however data association gives us one or more landmarks this iteration, we perform the update step.
• For each NEW landmark, we add it to the state vector.
• For each ASSOCIATED landmark, we perform the following steps:
1. Calculate the predicted position of the detected landmark, given the LMKs position in the map (state
vector) from the previous iteration and the robots predicted pose. The result (h) should be range and
bearing to the landmark within the robot’s reference frame.
2. Calculate the innovation which is the difference between the measured and the predicted position of the
landmark. (z-h)
3. Apply some initial gain to the innovation as we do not want to correct for the entirety of the error each
iteration due to noise in the measurement.
4. Utilize a complimentary filter to divide the error - Most of the resulting innovation from the previous
step will be used to correct robot position while a small percentage will be used to correct the landmarks
position within the map. For example 98% robot pose and 2% LMK position.
5. Apply a small correction to the current LMK in the map (state vector).
6. Sum the error in robot position with respect to the detected LMK and previous LMK this iteration in
order to take an average after iterating trough all detected LMKs before correcting the robot’s pose.
• Calculate the average of the accumulated errors from previous “for-loop”.
• Utilize a complimentary filter to correct error in pose. Putting a large amount of confidence into the average
of the accumulated error from the update step and a smaller amount of confidence in the predicted state
from the previous prediction step. In our case this complimentary filter governs the influence of the encoder
measurement versus the LIDAR measurement with respect to the robot pose. For example 20% encoder
measurement and 80% LIDAR measurement.
The algorithm loops continuously.
2.5 Extended Kalman filter
The extended Kalman filter is a specific example of a more general technique known as probabilistic estimation, see
Thrun et al, Probabilistic Robotics for more on the subject of probabilistic estimation. By simplifying we can say
that the Kalman filter provides a recursive method of estimating the state of a dynamical system in the presence
of noise. [4]
In the extended Kalman filter, the state transition and observation models don’t need to be linear
functions of the state but may instead be differentiable functions.
xk = f(xk−1, uk) + wk (2.7)
zk = h(xk) + vk (2.8)
16](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-16-2048.jpg)
![2.6 SLAM with extended Kalman filter 2 THEORY
Where wk and vk are the process and observation noises which are both assumed to be zero mean
multivariate Gaussian noises with covariance Qk and Rk respectively. uk is the control vector.
The function f can be used to compute the predicted state from the previous estimate and similarly the
function h can be used to compute the predicted measurement from the predicted state. However, f and
h cannot be applied to the covariance directly. Instead a matrix of partial derivatives (the Jacobian) is
computed.
At each time step, the Jacobian is evaluated with current predicted states. These matrices can be used
in the Kalman filter equations. This process essentially linearize the non-linear function around the
current estimate. [5]
2.6 SLAM with extended Kalman filter
The Kalman filter simultaneously maintains an estimate of the state vector (ˆx) and the estimate covariance matrix
(P). This results in the output of the Kalman filter being a Gaussian probability density function with mean (ˆx)
and covariance P. For our purpose of localizing an AGV, the output will be a distribution of likely robot positions.
The equations of the basic EKF is as follows.
¯xk|k−1 = fk−1(xk−1|k−1, uk) (2.9)
¯Pk|k−1 = Fk−1Pk−1FT
k−1 + Gk−1Qk−1GT
k−1 (2.10)
Sk = Rk + Hk
¯Pk|k−1HT
k (2.11)
Kk = ¯Pk|k−1HT
k S−1
k (2.12)
¯xk|k = ˆxk|k−1 + Kk(zk−hk(¯xk|k−1)) (2.13)
¯Pk|k = ¯Pk|k−1−KkSkKT
k (2.14)
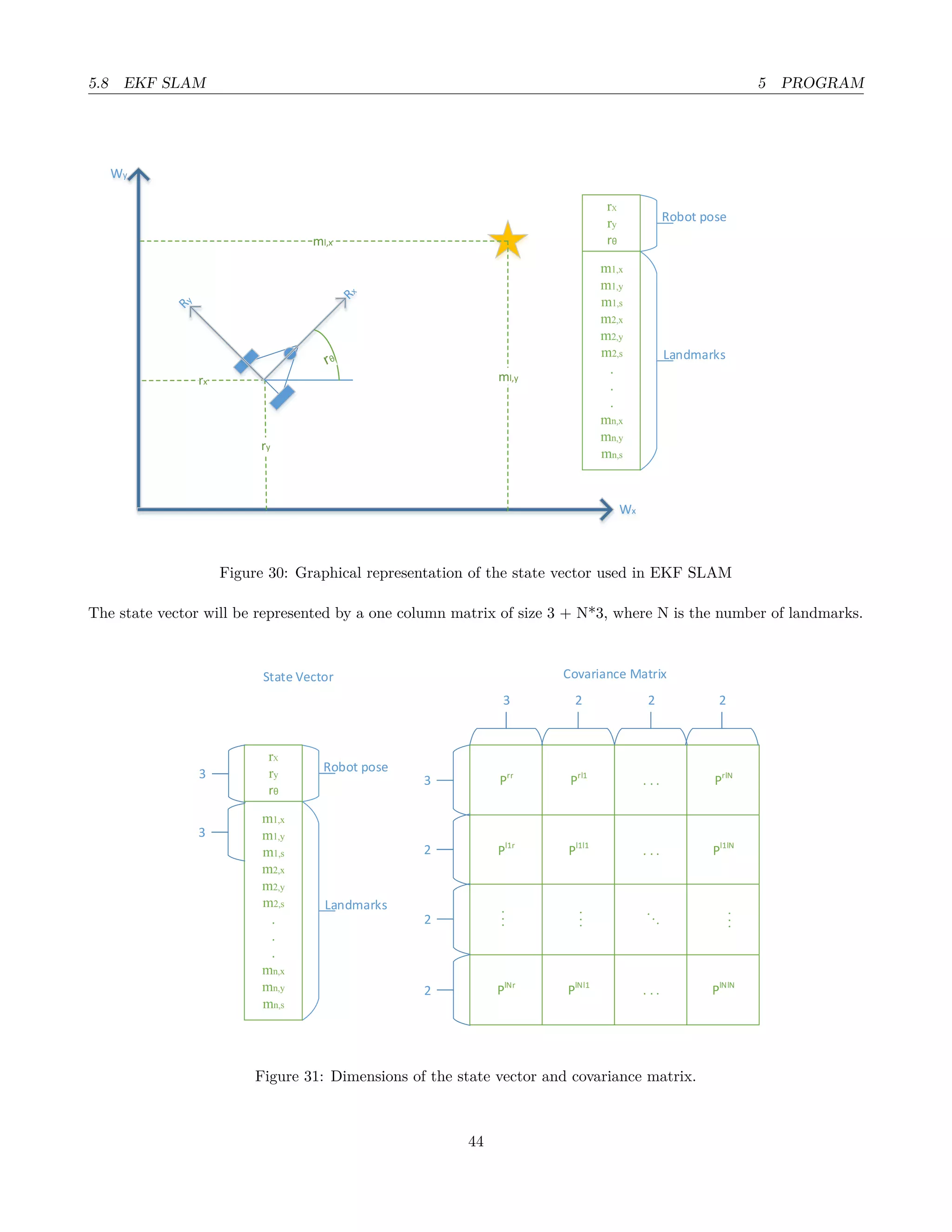
The state vector (ˆx) is defined to be the location and orientation of the AGV along with the location of each
landmark.
¯x = xr yr θr xl1 yl1 xl2 yl2 · · · xlnl
ylnl
T
(2.15)
Where (xryrθr) denotes the AGV’s position and orientation in the world frame {W}. xl1 yl1 xl2 yl2 · · · xlnl
ylnl
denotes the position of individual landmarks where (nl) is the total number of landmarks.
xk−1 is the previous state, ¯xk is the new state.
Pk−1 is the previous covariance matrix, ¯Pk is the new covariance matrix.
fk−1 is the motion model, used to predict robot pose.
hk is the measurement model, used to predict landmark position.
zk is the measurement from the range and bearing sensor (LIDAR), used in combination with h to calculate the
innovation.
Qk−1 is the control input error covariance matrix, noise in encoder data.
17](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-17-2048.jpg)
![2.6 SLAM with extended Kalman filter 2 THEORY
Rk is the measurement error covariance matrix, noise in LIDAR data.
Gk−1 is the Jacobian of the motion model f with resect to control input.
Fk−1 is the Jacobian of f with respect to the pose x, y and θ and is a sparse matrix employed to update purely
the upper 3x3 matrix in Pk. The rest of Fk−1 is the identity matrix.
Hk is the Jacobian of the measurement model h.
Sk is the innovation covariance matrix.
Kk is the computed Kalman gain.
The input error covariance matrix Qk−1 is a 2x2 matrix.
Qk−1 = covar(∆sr, ∆sl) =
kr|∆sr| 0
0 kl|∆sl|
(2.16)
Where kr and kl are constants ∆sr and ∆sl are the motion increments. We observe that the error is proportional
to the absolute value of the input and that the errors for the two wheels are independent. The constants kr and kl
are parameters that decides how much of the motion increment should be added as error. These can be determined
experimentally trough testing of the wheel encoders accuracy.
The covariance matrix Pk is given by the previous covariance matrix Pk−1, initially given the value 0.
Pinitial =
0 0 0
0 0 0
0 0 0
(2.17)
¯Pk = Fk−1Pk−1FT
k−1 + Gk−1Qk−1GT
k−1 = pf · Pk−1 · pfT
+ ∆rl
f · Qk−1 · ∆rl
fT
(2.18)
To update the covariance matrix at the end of the prediction step in SLAM, we need the two Jacobian matrices
Fk−1 and Gk−1. Where Fk−1 is the partial derivate of f with respect to the robot pose x, y and θ. Gk−1 is the
partial derivative of f with respect to control input ∆sr and ∆sl.
J =
df
dx
= ∂f
∂x1
· · · ∂f
∂xn
=
∂f1
∂x1
· · · ∂f1
∂xn
...
...
...
∂fm
∂x1
· · · ∂fm
∂xn
(2.19)
The Jacobian matrix is the matrix of all first order partial derivatives of a vector valued function. [6]
The motion model for a differential drive f has already been described and is given by:
f(x, y, θ, ∆sr, ∆sl) =
x
y
θ
+
∆sr+∆sl
2 cos θ + ∆sr−∆sl
2b
∆sr+∆sl
2 sin θ + ∆sr−∆sl
2b
∆sr−∆sl
b
(2.20)
The Jacobian matrix F of the motion model with respect to robot pose:
18](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-18-2048.jpg)
![2.6 SLAM with extended Kalman filter 2 THEORY
Fk−1 = pf =
1 0 −∆s sin(θ + ∆θ/2)
0 1 ∆s cos(θ + ∆θ/2)
0 0 1
(2.21)
The Jacobian matrix G of the motion model with respect to control input
Gk−1 = ∆rl
=
1
2 cos(θ + ∆θ
2 ) − ∆s
2b sin(θ + ∆θ
2 ) 1
2 cos(θ + ∆θ
2 ) + ∆s
2b sin(θ + ∆θ
2 )
1
2 sin(θ + ∆θ
2 ) + ∆s
2b cos(θ + ∆θ
2 ) 1
2 sin(θ + ∆θ
2 ) − ∆s
2b cos(θ + ∆θ
2 )
1
b −1
b
(2.22)
∆s =
∆sr + ∆sl
2
(2.23)
∆θ =
∆sr − ∆sl
b
(2.24)
We see that the Jacobians F and G has the variables θ, ∆s, ∆θ. We will therefore have to compute these Jacobians
whenever the robot pose or the control input changes. As before, the constant b is the robot’s wheelbase.
This concludes the prediction step of EKF SLAM, we now have a predicted postion given a control input and we
have a predicted covariance matrix to reflect the uncertainty of the prediction.
For the update step we need the measurement model h. This defines how we calculate the range and bearing to
an expected landmark given by our map in the state vector xk. In other words, the filter makes a guess as to what
the measurement from our sensor zk should be based on previously observed landmarks stored in the map and the
robot’s predicted pose.
We obtain zk from data association on the form [ρrange, αbearing]T
. The offset of the sensors’ coordinate frame
relative to the robot’s coordinate frame has already been accounted for in the data association algorithm, thus we
get the measurement zk in the robots coordinate frame R.
Wy
Wx
Sensor frame {S} offset
relative to Robot frame {R}
Figure 6: Sensor frame {S offset relative to robot frame {R}.
19](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-19-2048.jpg)


![2.7 Laser scanner 2 THEORY
Landmark-Landmark covariance.
¯P(N+1)i
= Jxr( ¯Pri
)T
(2.40)
Landmark-Landmark covariance, other side of diagonal.
¯Pi(N+1)
= ( ¯P(N+1)i
)T
(2.41)
¯Prr
k is the 3x3 covariance matrix over the robots state.
¯P
r(n+1)
k is the 3x2 robot-landmark covariance.
¯P
(n+1)i
k is the 2x2 landmark-landmark covariance.
i is the ith landmark, meaning the covariance is computed for each landmark.
n is again the number of landmarks.
This concludes the EKF SLAM. The algorithm is now ready to start at the beginning with new control input.
2.7 Laser scanner
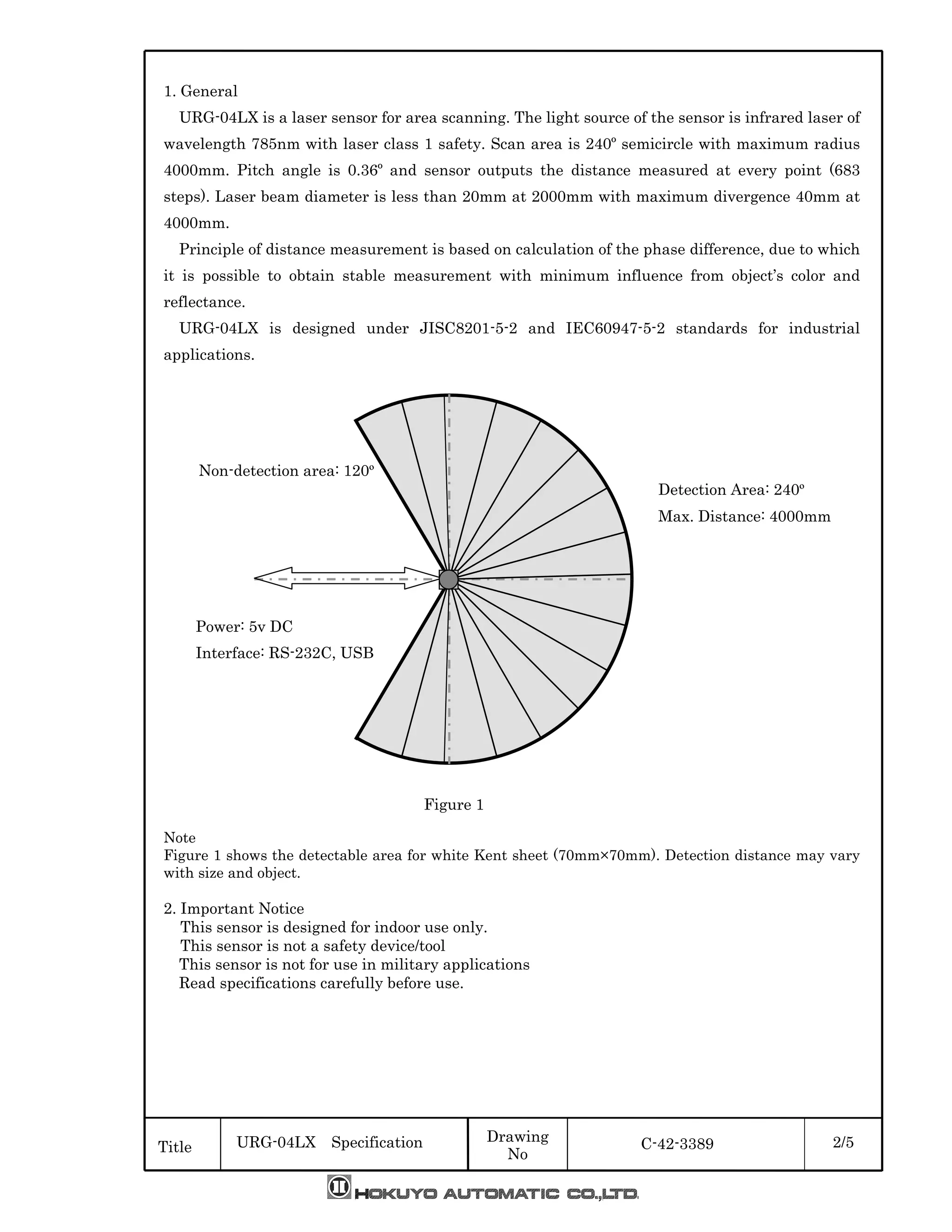
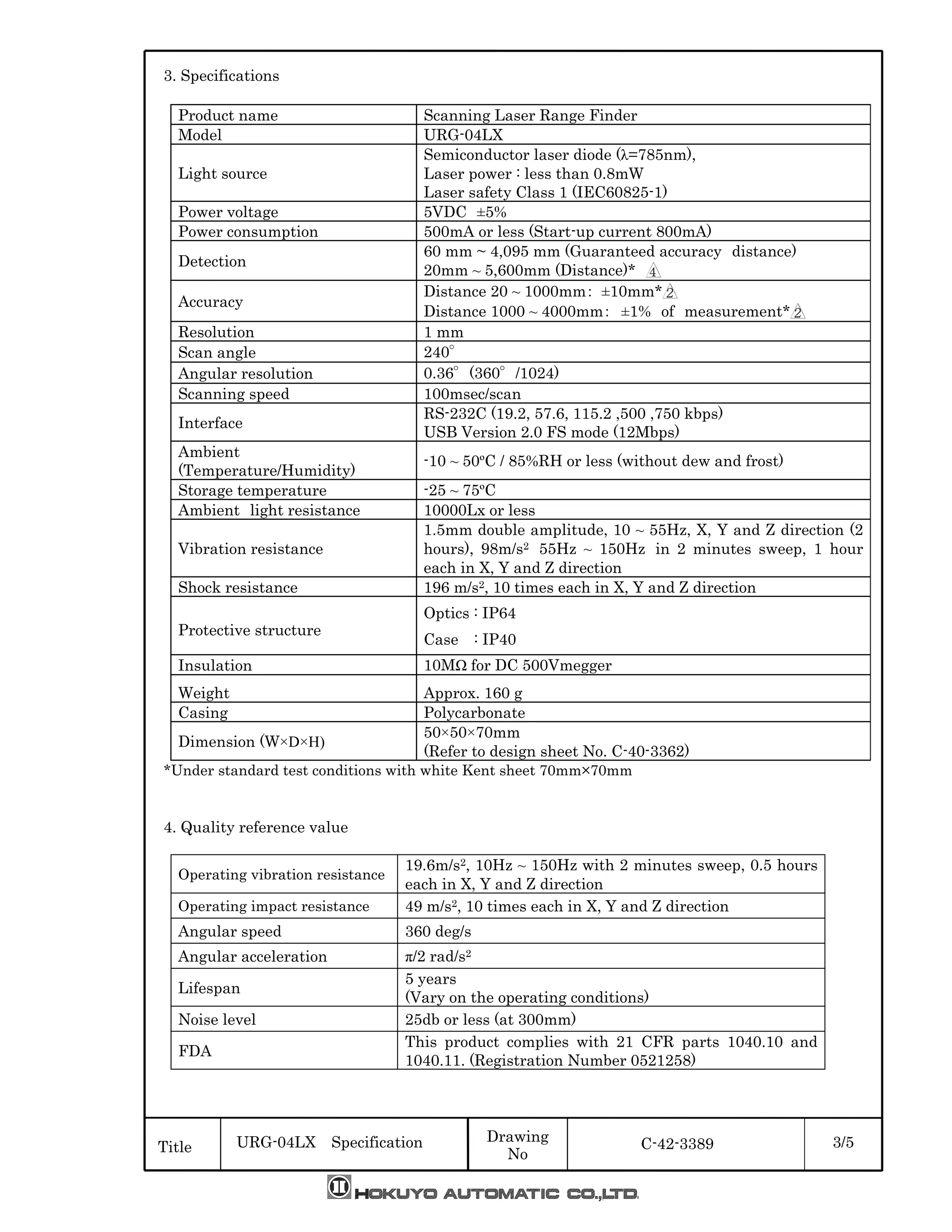
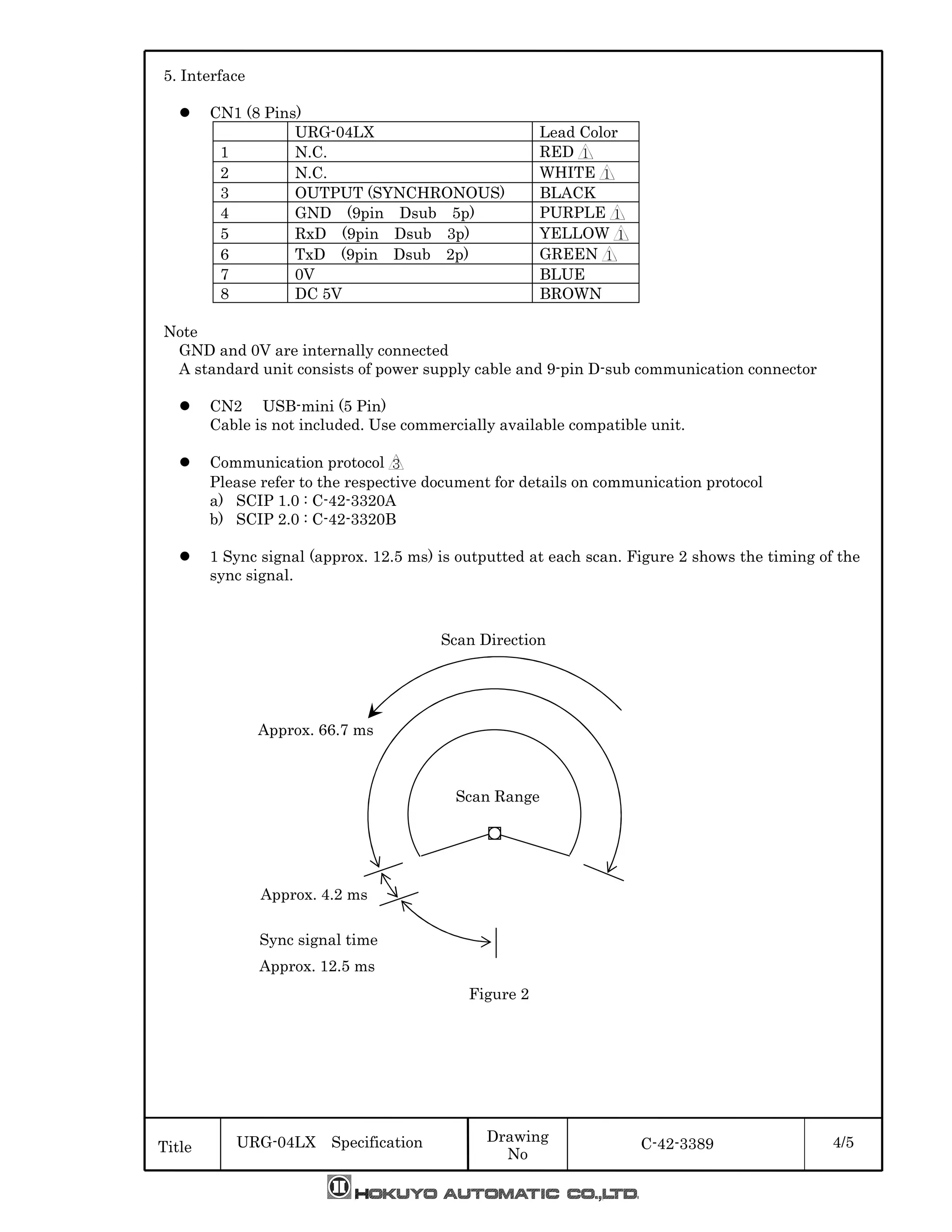
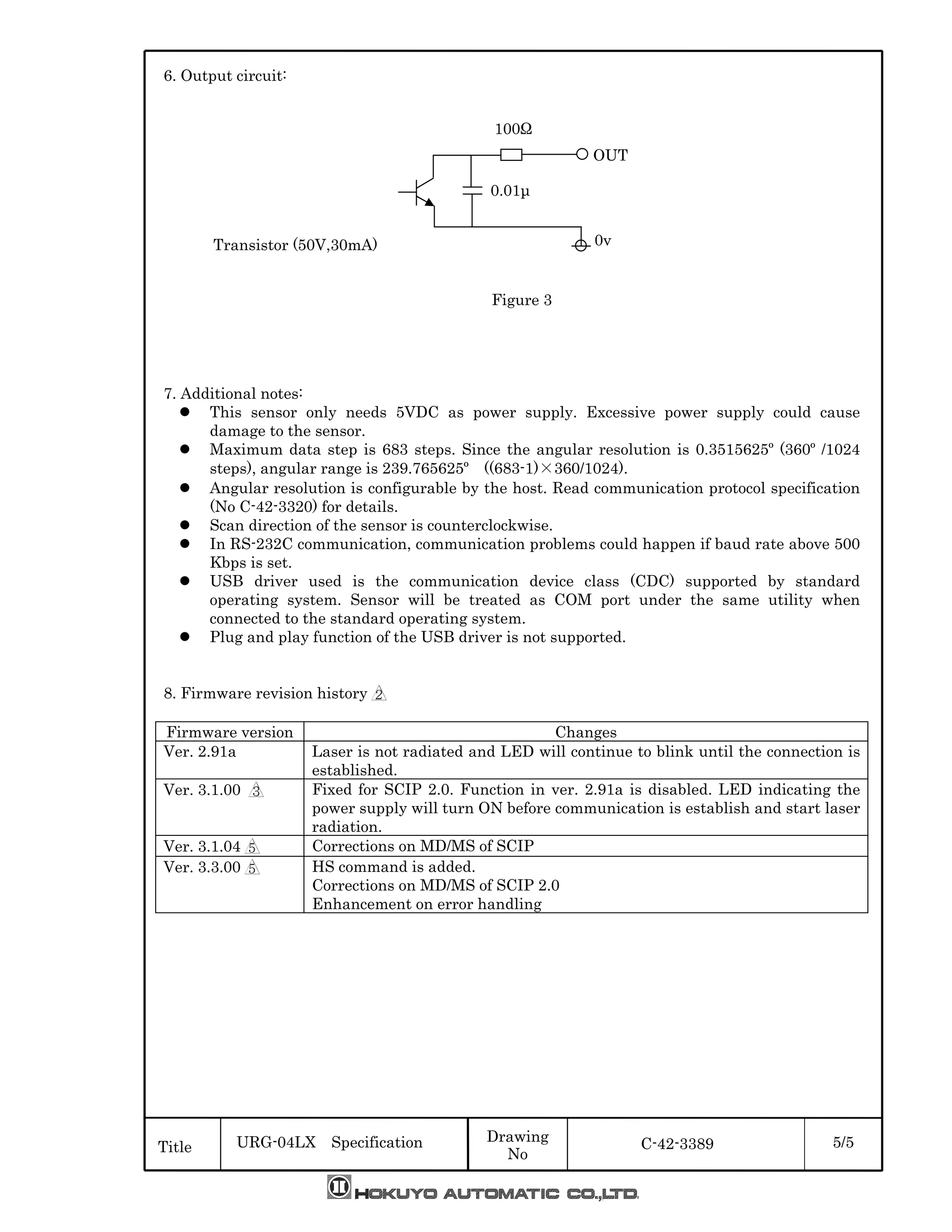
The laser scanner used for this project is Hokuyo URG-04LX. It emits a laser beam with a wavelength of 785nm,
which is on the boundary between visible light and infrared light. [7] The light wave moves in a straight line and
reflects off of an obstacle before returning to the laser scanner. The principle behind the distance measurement is
based on calculation of the phase difference between the sent and received signal. This makes it possible to obtain
stable measurements with minimum influence from objects’ color and reflectance. [8] The emitted wave has the
following equation:
A sin(ωt) (2.42)
Where A is the amplitude, ω is the frequency and t is the phase. The equation for the received wave is as follows:
B sin(ω(t − dϕ)) (2.43)
Where B is the new amplitude and dϕ is the travel time. The signals are blended in a signal multiplier and the
wave equation is now:
A · B
2
(cos(ωdϕ) − cos(2ωt − ωdϕ)) (2.44)
A low-pass filter then enables it to get rid of the high-frequency part cos(2ωt − ωdϕ) and keep the constant part
cos(ωdϕ), revealing the phase difference. The distance covered is calculated by:
D =
ct
2
=
cdϕ
2ω
=
λdϕ
2
(2.45)
However, there is still one major problem. With the current setup, the theoretic range of the laser scanner is limited
to half the wavelength of the emitted laser. This is because it can only use phase differences less than 360°. The
signal needs to be modulated with a carrier wave of lower frequency to increase the wavelength. This is done by
turning the laser on and off with the desired frequency.
22](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-22-2048.jpg)

![2.8 Line extraction 2 THEORY
2.8.2 Split and merge
Split and merge is an algorithm for reducing the number of points in a curve that is approximated by a series of
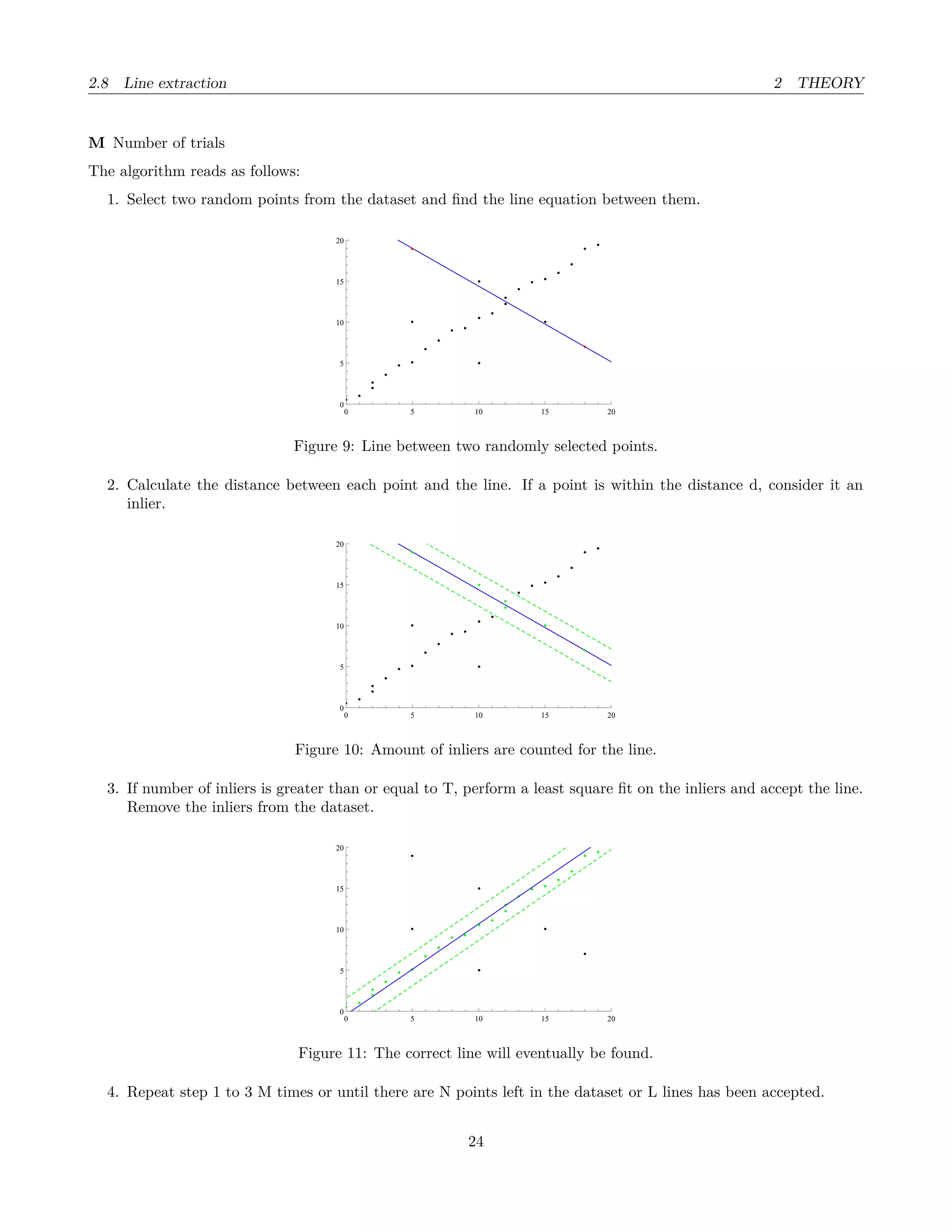
points. [9] The algorithm reads as follows:
1. Find the line between the two most distant points.
Figure 12: A line is drawn between the two most distant points.
2. Find the point farthest away from the line. If the distance from the point to the line is more than a given
threshold, perform a split.
Figure 13: The most distant point from the line is within a given threshold, so a split is performed.
3. For each new line segment, repeat step 2, and continue until none of the new segments can be split any further.
Figure 14: The contour after no more splits can be made.
4. If two consecutive line segments are collinear enough, merge them.
25](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-25-2048.jpg)
![2.9 Loop closure 2 THEORY
Figure 15: Two of the line segments are collinear enough to merge them.
2.9 Loop closure
Loop closure is the problem of determining wheter or not the robot has returned to a previously visited place. This
is one of the hardest problems, but is essential for a robust long term SLAM. In order to solve this problem, the
robot needs to be able to recognise when it has returned to a previously mapped region. When two regions in the
map are found to be the same, but their position is incompatible because of the uncertainty of the map, the robot
needs to calculate the right transformations needed to align these regions to close the loop.
Figure 16: A previously visited location is not registered at the same position, illustrating the loop closure problem.
Three types of solutions to this problem is map-to-map, image-to-image and image-to-map matching. Map-to-map
looks for similarities between the current local map and earlier observed maps. Both visual similarities and distance
between features can be used to find a set of common features between the two maps. Once this set has been
found, the transformation needed to align the two maps can be found. Image-to-image looks for similarities in the
latest captured image and previous images. This obviously requires a camera mounted on the robot. Distinct and
identical features are given a high probability of beeing the same. Image-to-map looks for features in the latest
captured image it can compare with features in the map. [10]
26](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-26-2048.jpg)
![2.10 A* search algorithm 2 THEORY
2.10 A* search algorithm
A* (pronounced “a star”) is an algorithm for finding the shortest path between nodes in a graph. It builds on the
principle of breadth-first search and Djikstra’s algorithm.
The breadth-first search algorithm uses a FIFO (First In First Out) data structure or a queue to explore the
nodes.[11] The nodes also stores whether it has been visited or not. This information is being updated by the
algorithm. The search starts at the start node and adds its neighboring nodes to the queue if they have not already
been visited. Then continues with the next node in the queue until the queue is empty. This results in the nodes
being visited in the breadth before the depth as illustrated in figure 17.
1
2 3
4 5 6
7
Figure 17: The number on the nodes tells in which order they were visited.
The number on the nodes tells in which order the nodes were discovered.
Dijkstra’s algorithm is a pathfinding algorithm conceived by the dutch computer scientist Edsger W. Dijkstra in
1956.[12] It uses breadth-first search, but instead of using an ordinary queue, it uses a priority queue. A priority
queue is a queue where the element with the highest priority is picked first. And for each node it visit, it keeps
track of where it came from and how many nodes has been traveled to get to that particular node, or often called
the cost. Initially, the cost is set to be infinite. If the cost for the current node is equal or less than the cost for the
next node, then add the next node to the queue with a priority equal to the cost for the node. The output from
this algorithm is not the path itself, but rather the cost of the route.
27](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-27-2048.jpg)
![2.11 Navigation 2 THEORY
A
B, A D , AC, A
E, B
F, C I, E
G , C H , D
J, F
Figure 18: A graph being explored by Dijkstras. The second letter is the node it came from.
To obtain the route, select the goal node and fetch the node it came from, and continue until you reach the start
node. Reverse the path to get the path from the start node to the goal node.
A* is a pathfinding algorithm that uses heuristic to guide its search. [13] Heuristic is the use of guidelines to solve
a problem, contrary to having strict steps like an algorithm. A* only focuses on reaching the goal node from the
current node, not to reach all other nodes. The algorithm computes the following function.
f(n) = g(n) + h(n) (2.46)
Where f(n) is the evaluation cost, g(n) is the cost from the starting node to reach node n and h(n) is the estimate
of the cost of the cheapest route from n to the goal node. A* generates an optimal solution if h(n) is an admissible
heuristic. h(n) is admissible if
∀n, h(n) ≤ h∗
(n) (2.47)
Where h∗
(n) is the actual cost to reach the goal node from node n. Or in other words, the heuristic function is
admissible if it never overestimates the cost to reach the goal node. [14]
The implementation of the A* star algorithm is very similar to Dijkstra’s, but the priority is now being set to the
evaluation cost f(n).
2.11 Navigation
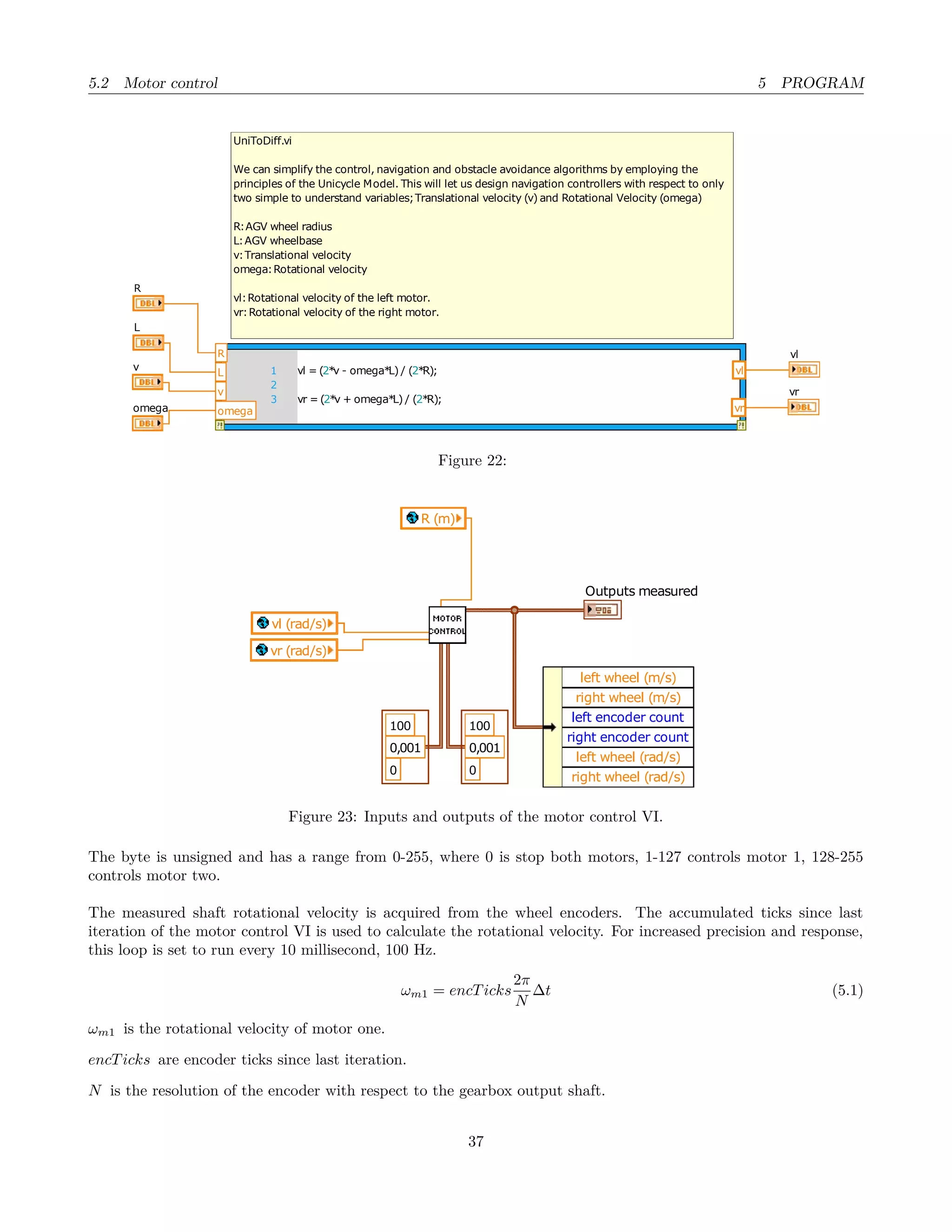
2.11.1 Unicycle model
While we need to control each wheel of a differential drive robot independently, envisioning how the robot behaves
based on independent wheel velocities might be a little tricky. Therefore we might want to simplify the way we
28](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-28-2048.jpg)

![4 COMPONENTS
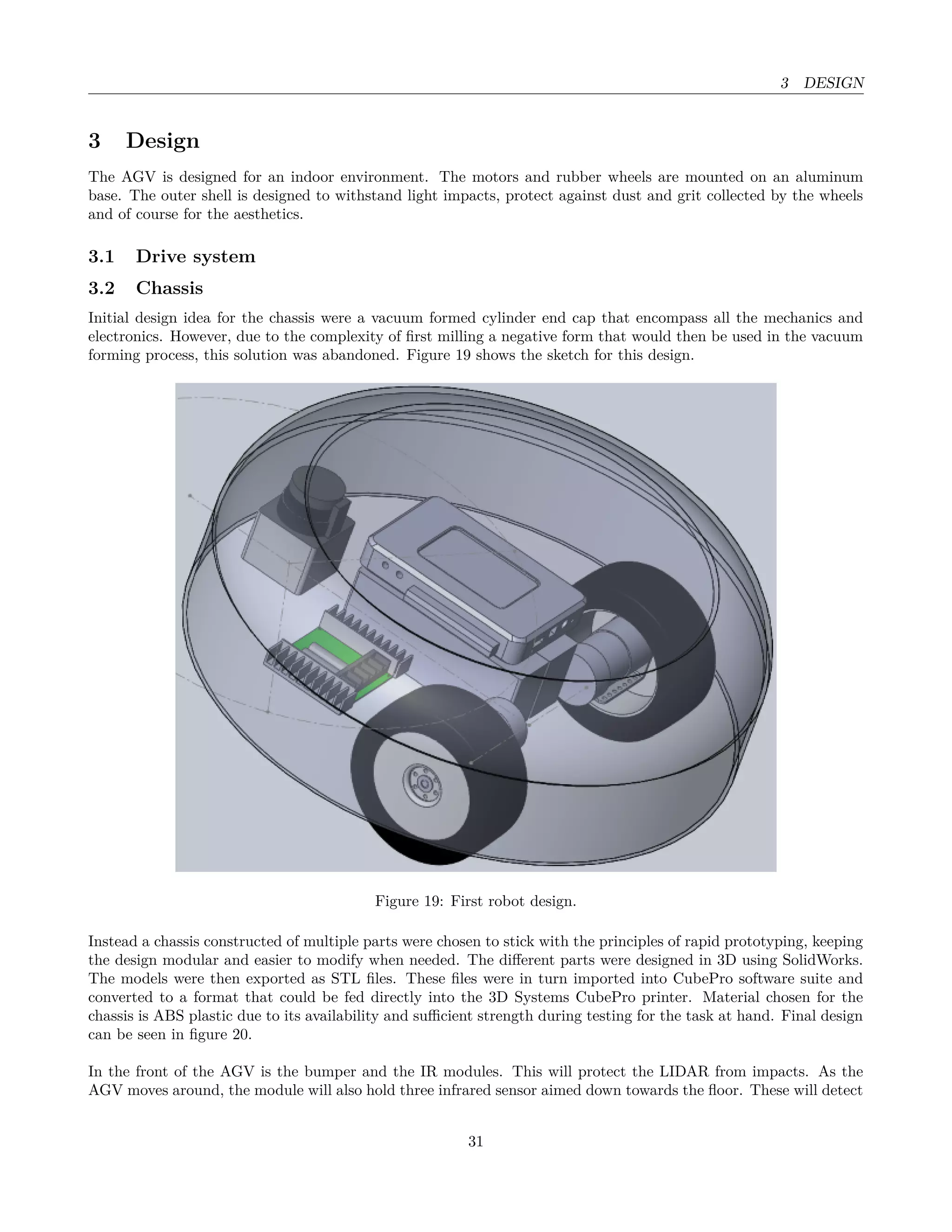
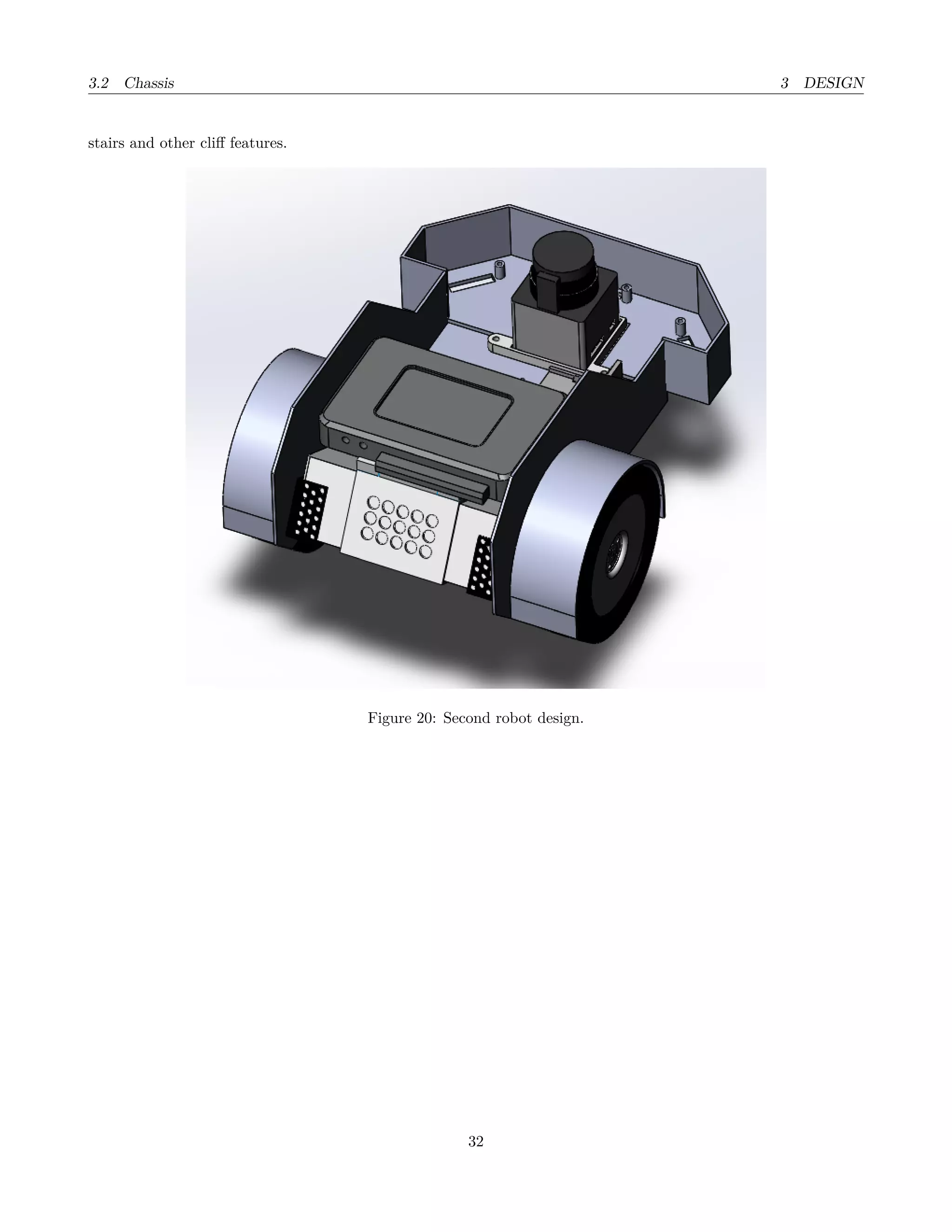
4 Components
A variety of components are required to solve the SLAM problem. Motor encoders to estimate position and a
LIDAR for mapping are the most essential components. There is also a need for a battery, motors, a motor drive
and a microcontroller to control and drive the AGV. An assortment of components were already supplied for this
project which removed the need to design, dimension and acquire robot hardware. However, certain additions were
deemed necessary for successfull and safe navigation.
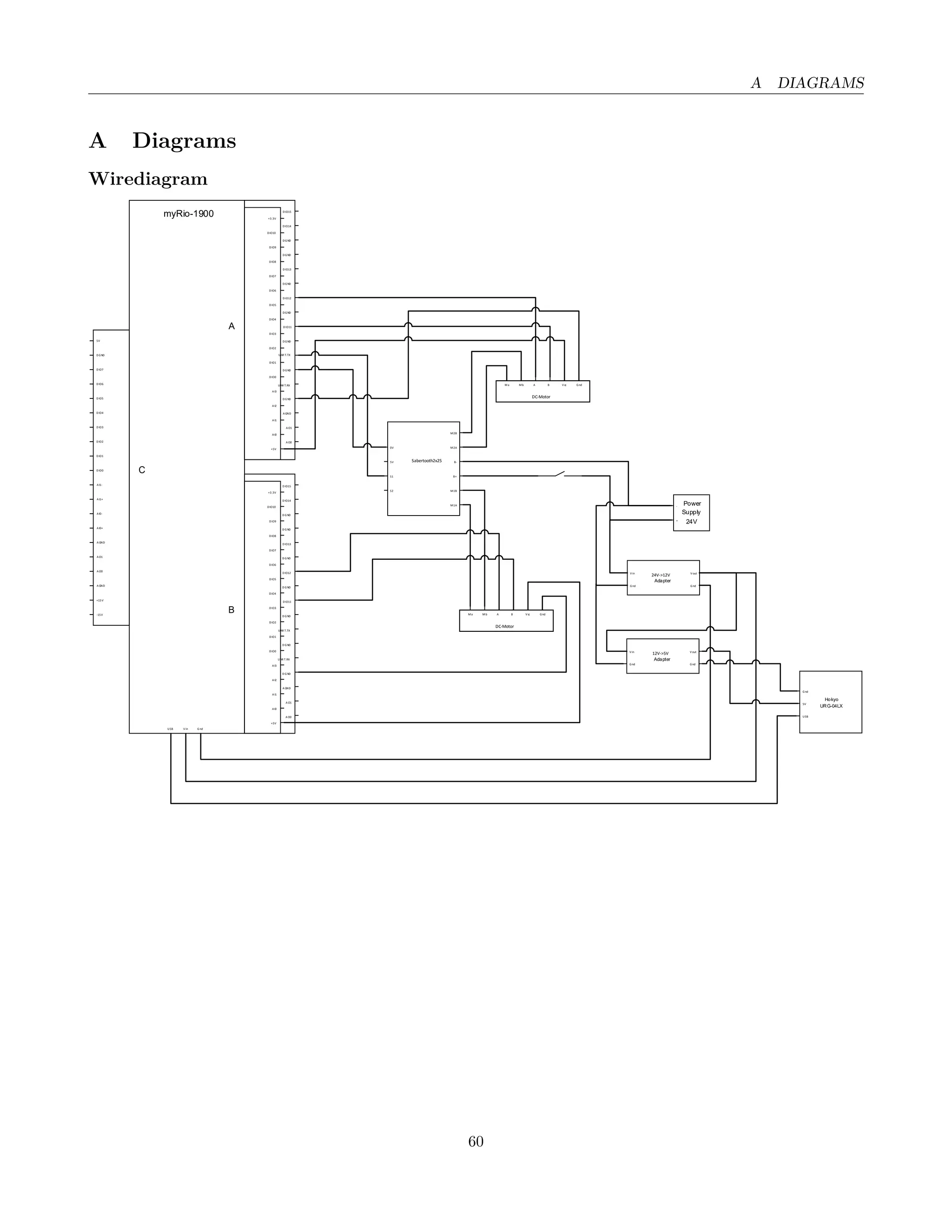
4.1 DC drive motor
The RB-Dfr-444 is a 12 volt brushed DC motor. It comes preassembled with a metal spur-gear gearbox and
integrated quadrature encoder.
Rated torque at 12V 0.147 Nm
Gear ratio 43.7:1
Encoder resolution at motor shaft 64 CPR (counts per revolution)
Encoder resolution at gearbox shaft 2797 CPR
Table 3: Motor specifications.
4.2 DC motor controller
Sabertooth 2x25 motor controller has two channels and is rated at a maximum of 25A per channel continuous. It
also offers different modes of controlling it, by traditional RC receiver, 0-5V analog signals for each motor or by
supplying it with a byte (0-255) sent over serial line. The required form of input is selected on a DIP switch on the
motor controller. One will observe that the specifications of this motor controller far outperforms the requirements
posed by the AGV discussed in this paper. If the controller had not already been supplied a lower spec and cheaper
controller would have been a better option seen from an efficient design point of view.
4.3 NI myRIO
myRIO is a microcontroller developed by National Instruments based on their RIO architecture. RIO is an acronym
for reconfigurable input/output and is based on four components: a processor, a reconfigurable FPGA, measurement
I/O hardware, and LabVIEW. [15] The microcontroller run a real-time version of the Linux operating system.[16]
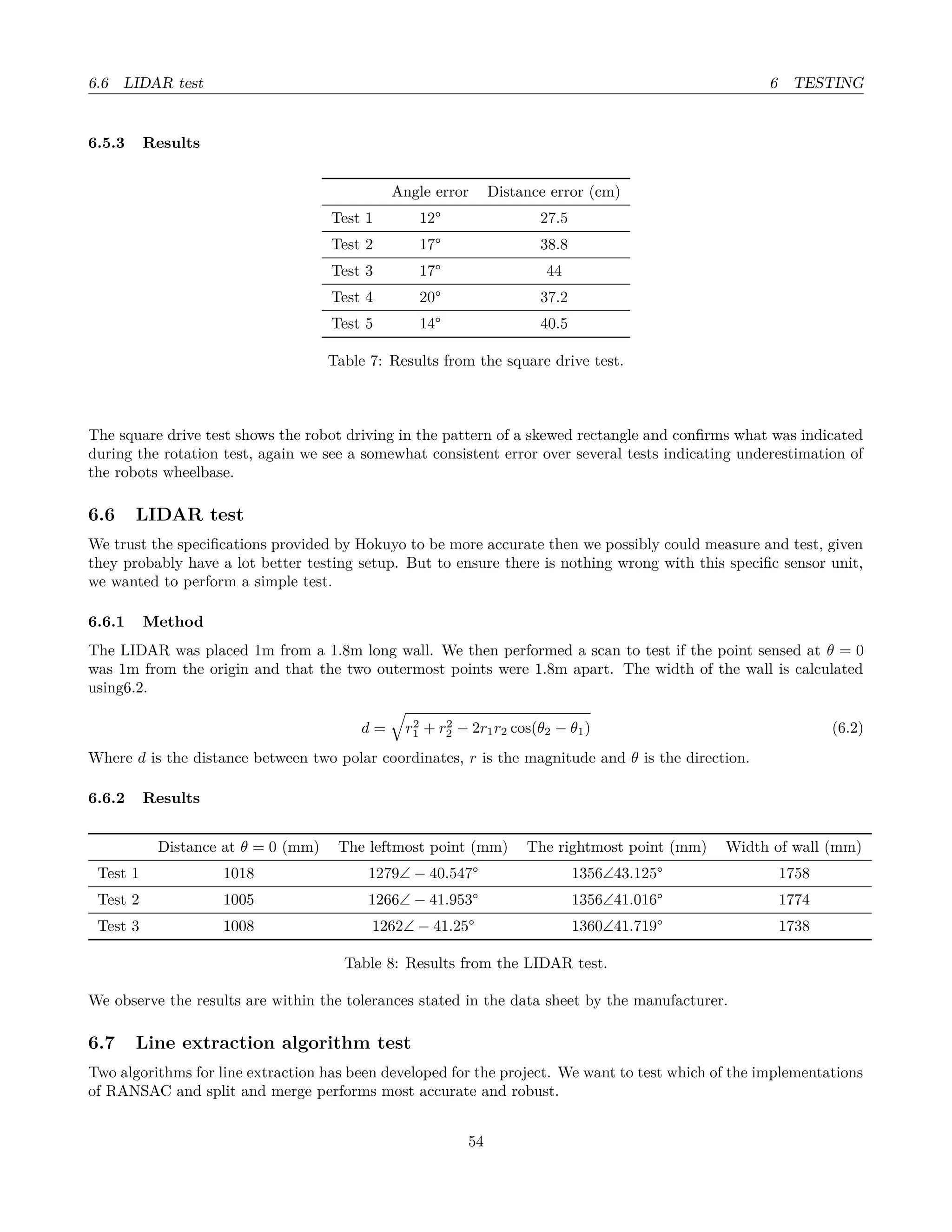
4.4 LIDAR
Hukoyu URG-04LX is a scanning laser range finder. It has a scan angle of 240 degrees and maximum radius of
4000mm. Pitch angle is 0.36 degree (resolution). The sensor outputs a maximum of 683 datapoints per scan at a
maximum scan rate of 10Hz. Rated accuracy is ±1% of measurement in the range 1000mm-4000mm, for ranges less
than 1000mm rated accuracy is ±10mm. The LIDAR scan is read as an array consisting of range with corresponding
angle data. This will be useful for obstacle avoidance, mapping and navigation.
4.5 Infrared sensor
Sharp 2Y0A21 sensor returns an analog voltage representing the range to a detected surface. An LED in the device
emits infrared light which is reflected by the surface that the device is aimed at, a PSD in the device receives
this reflected light resulting in an analog voltage being transmitted from the sensor to a connected controller. An
increase in distance is determined by a drop in voltage. Recommended range for this specific sensor is 10cm to
80cm. This will be used for cliff detection, ie. determine if the AGV is about to drive off a staircase or other
platform.
34](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-34-2048.jpg)

![5.3 Sensor data acquisition 5 PROGRAM
∆t is the time in seconds since last iteration.
In this example VI, we can see the process where the inputs; encoder ticks, wheel radius and time since last
iteration are used to control the motor velocity. The VI also outputs useful measurements to be used elsewhere in
the program; encoder ticks, rotational velocity of the output shaft and linear velocity of the wheel mounted to the
output shaft. We also see how the PID output is conditioned to a byte ranging from 1-127 to control direction and
velocity of the motor and a midpoint of 64 being the command to stop motor one.
encTicks
Linear Velocity [m/s]
Rotaional Velocity [rad/s]
Ref. vl (rad/s)
Reset Counter
Counter Value
Encoder Left
64
1
127
Characters to Writ
Character Count
UART
PID gains
1000
dt (ms)
Loop delay, used to
calcute velocities
Encoder counts to radians
(x/2797)*2*pi
R (m)
Wheel radius
Measurements
Figure 24: Code for controlling a motor.
5.3 Sensor data acquisition
The Hokuyo URG drivers included with LabVIEW is used to communicate with the device. The initialization
function is called once, at the beginning of the program. It needs to know which device to initialize with an
identifier specified by the Virtual Instrument Software Architecture (VISA) standard. The VISA format is Interface
Type[board index]::Address::INSTR and in the case of the Hokuyo URG-04LX connected to the USB port on the
myRio, it is USB0::0x15D1:. The close function is called once, at the end of the program, and attempts to turn off
the laser before terminating the software connection to the instrument. The data acquisition function takes start
point and end point in degrees and cluster count as parameters. Cluster count refers to the number of measurements
which are clustered together. The functions returns a magnitude and direction array which are associated. To fetch
the data from the first measurement for instance, the 0th index of each array needs to be accessed.
38](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-38-2048.jpg)
![5.4 Line extraction 5 PROGRAM
Figure 25: LabView code for LIDAR data acquisition.
This will still not allow to interface with the laser scanner through LabVIEW. The USB module on the Linux
operating system is taking control over the laser scanner when connected to the USB port, preventing LabVIEW
from accessing it. To fix this, we logged into the Linux filesystem and removed the USB module, preventing it from
taking control over the laser scanner. [17]
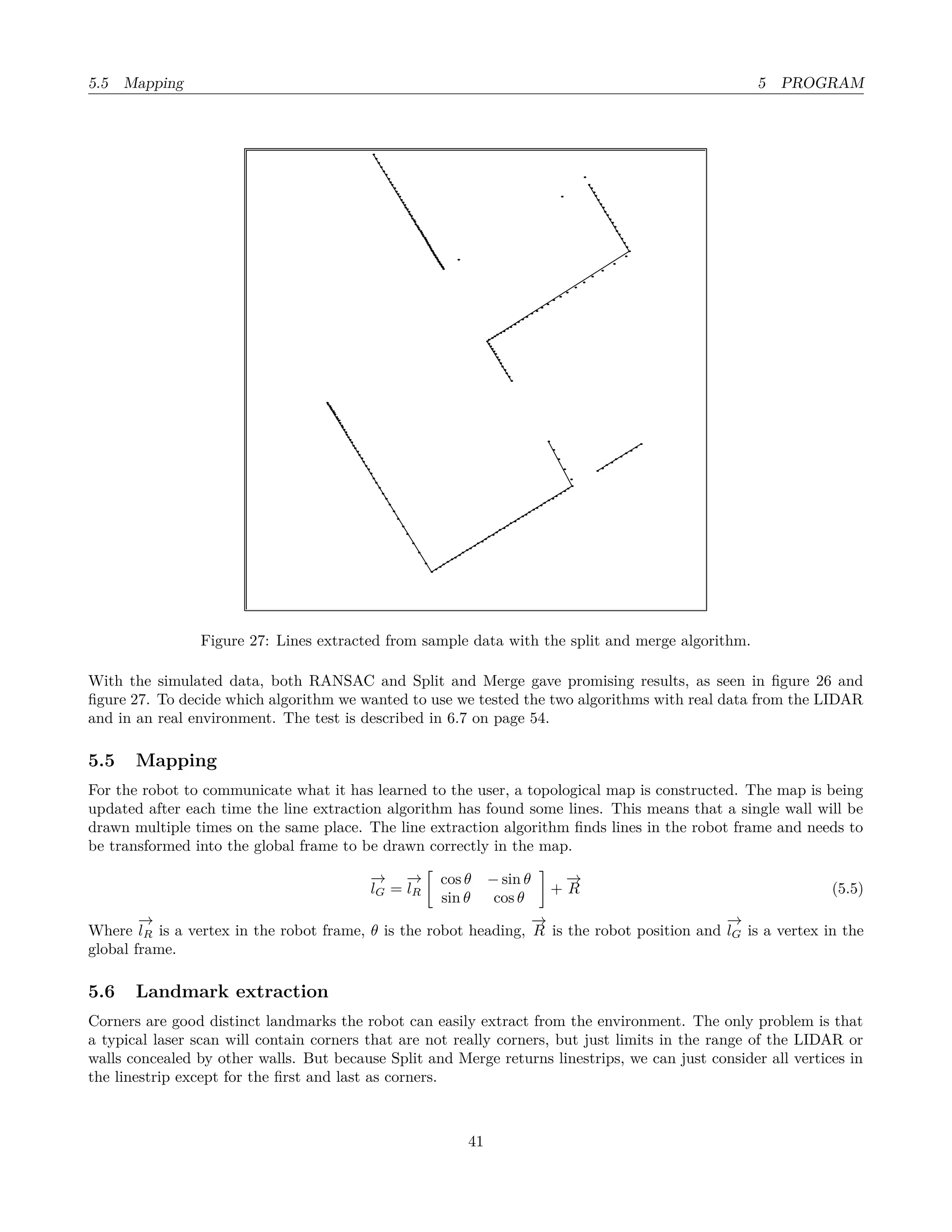
5.4 Line extraction
A variety of methods were tried to program a fast and robust line extraction algorithm.
RANSAC is one such algorithm and is explained in 2.8.1 on page 23. Instead of returning extracted lines with the
RANSAC algorithm, we return a list of fitted points for the lines. Clustering is then performed on the points for
finding the actual start and end points for the lines. To find gaps, we check the distance between each point and
the next point.
d = (x2 − x1)2 + (y2 − y1)2 (5.2)
If the distance is greater than a threshold, extract a line with a start point at the end of the last gap and an end
point at the gap.
39](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-39-2048.jpg)

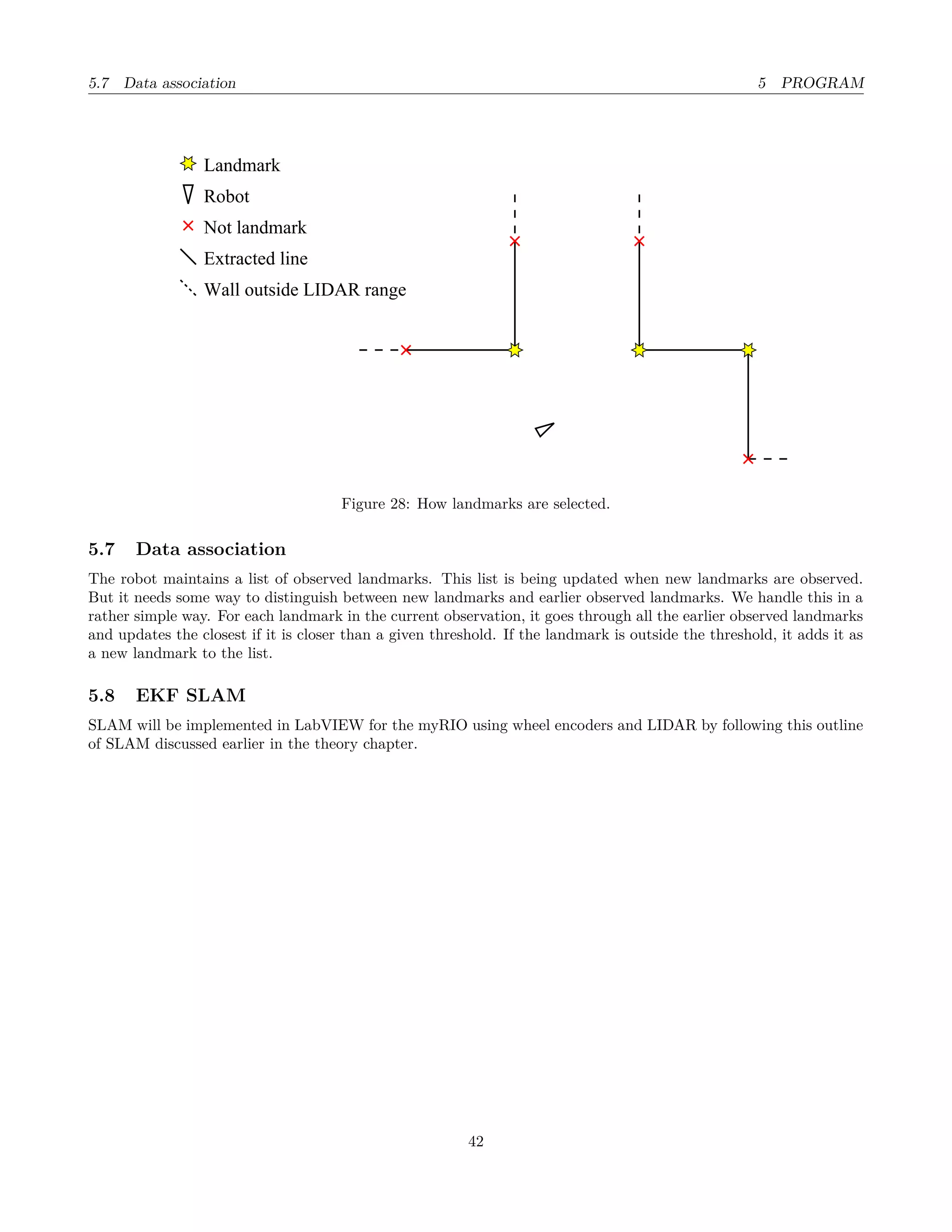


![5.8 EKF SLAM 5 PROGRAM
b = 0.2; %robot wheelsbase [m]
deltaSr = u(1,1); %control inputs [m]
deltaSl = u(2,1);
dS = (deltaSr+deltaSl) / 2; %delta S [m]
dT = (deltaSr-deltaSl) / 2*b; %delta THETA [rad]
%Predict new postion
x_new = [x(1,1);x(2,1);x(3,1);] + [dS*cos(x(3,1) + dT/2);
dS*sin(x(3,1) + dT/2);
dT ];
%Wrap robot orientation/heading to [-PI,PI]
if x_new(3,1) > pi
x_new(3,1) = x_new(3,1) - 2*pi;
end
if x_new(3,1) < -pi
x_new(3,1) = x_new(3,1) + 2*pi;
end
kr = 0.3; %Error constant right wheel
kl = 0.3; %Error constant left wheel
Q = [kr*abs(deltaSr) 0;
0 kl*abs(deltaSl)];
F = [1 0 -dS*sin(x(3,1) + dT/2);
0 1 dS*cos(x(3,1) + dT/2);
0 0 1 ];
G = [0.5*cos(x(3,1)+dT/2)-0.5*(dS/b)*sin(x(3,1)+dT/2) 0.5*cos(x(3,1)+dT/2)+0.5*(dS/b)*sin(x(3,1)+dT/2);
0.5*sin(x(3,1)+dT/2)+0.5*(dS/b)*cos(x(3,1)+dT/2) 0.5*sin(x(3,1)+dT/2)-0.5*(dS/b)*cos(x(3,1)+dT/2);
(1/b) -(1/b) ];
%Predict new covariance matrix using EKF sparse prediction equations
P_new(1:3, 1:3) = F*P(1:3,1:3)*F' + G*Q*G';
P_new(1:3, 4:length(P_new)) = F*P_new(1:3, 4:length(P_new));
P_new(4:length(P_new), 1:3) = (P_new(1:3, 4:length(P_new)))';
x = x_new;
P = P_new;
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
P
x
u
P
x
x
P
u
error out
x2 (Colum
P2
Figure 33: EKF SLAM prediction step, MathScript node.
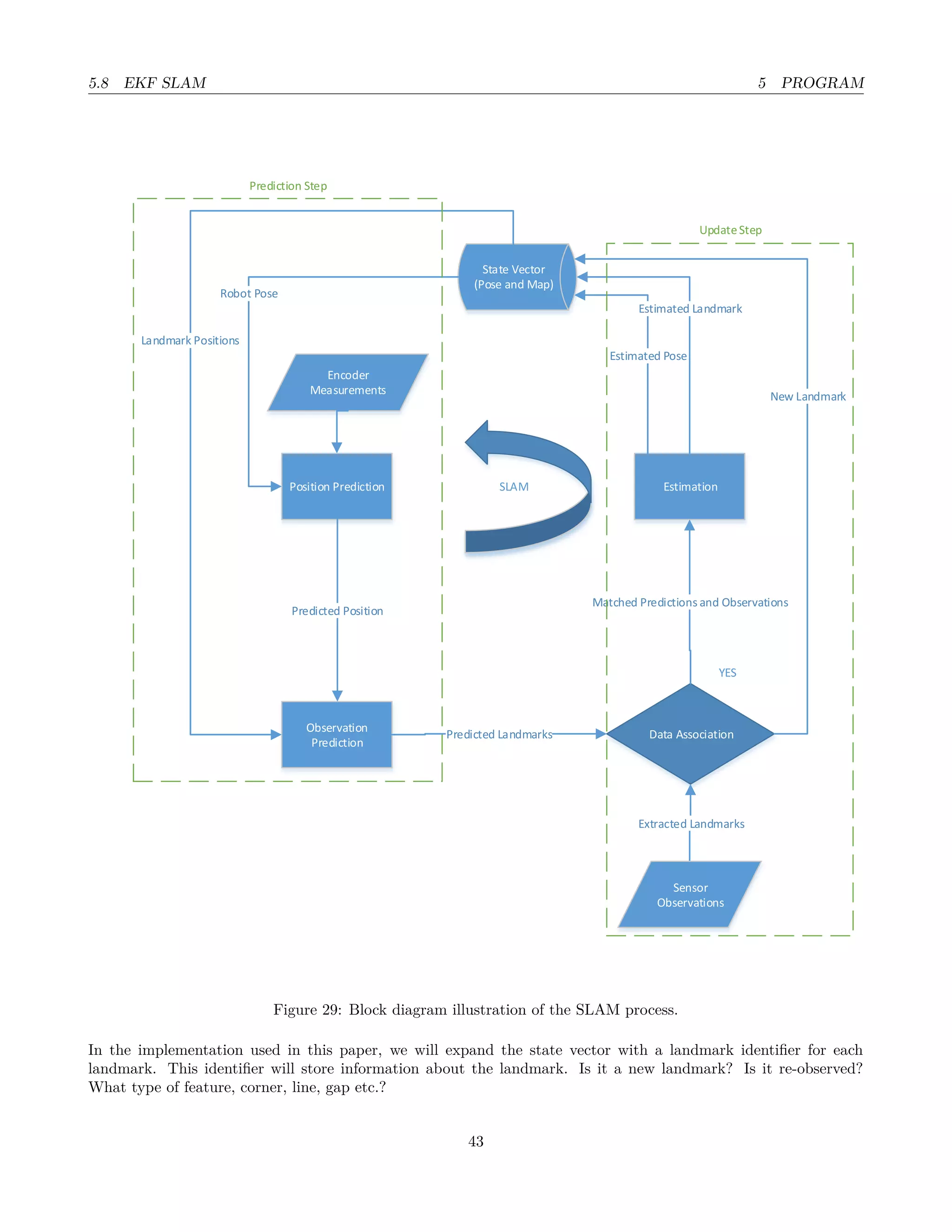
The update step applies to the full state vector and the full covariance matrix.
47](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-47-2048.jpg)

![5.9 Occupancy grid map 5 PROGRAM
Figure 35: New landmark expanding the state vector and covariance matrix.
The mean (location) of the new landmark is computed with the inverse of the observation function.
g(zk, xk) =
zk,range cos(zk,α + xk,θ) + xk,x
zk,range sin(zk,α + xk,θ) + xk,y
(5.27)
The covariance is either set to a high value then computed when the landmark is re-observed. Or an initial covariance
values are calculated with the Jacobians Jxr and Jz
Jxr =
∂g(zk, xk)
xk,x,y,θ
= (5.28)
Jz =
∂g(zk, xk)
zk,ρ,α
= (5.29)
The state vector and covariance matrix is now fully updated. The EKF is ready for the next iteration.
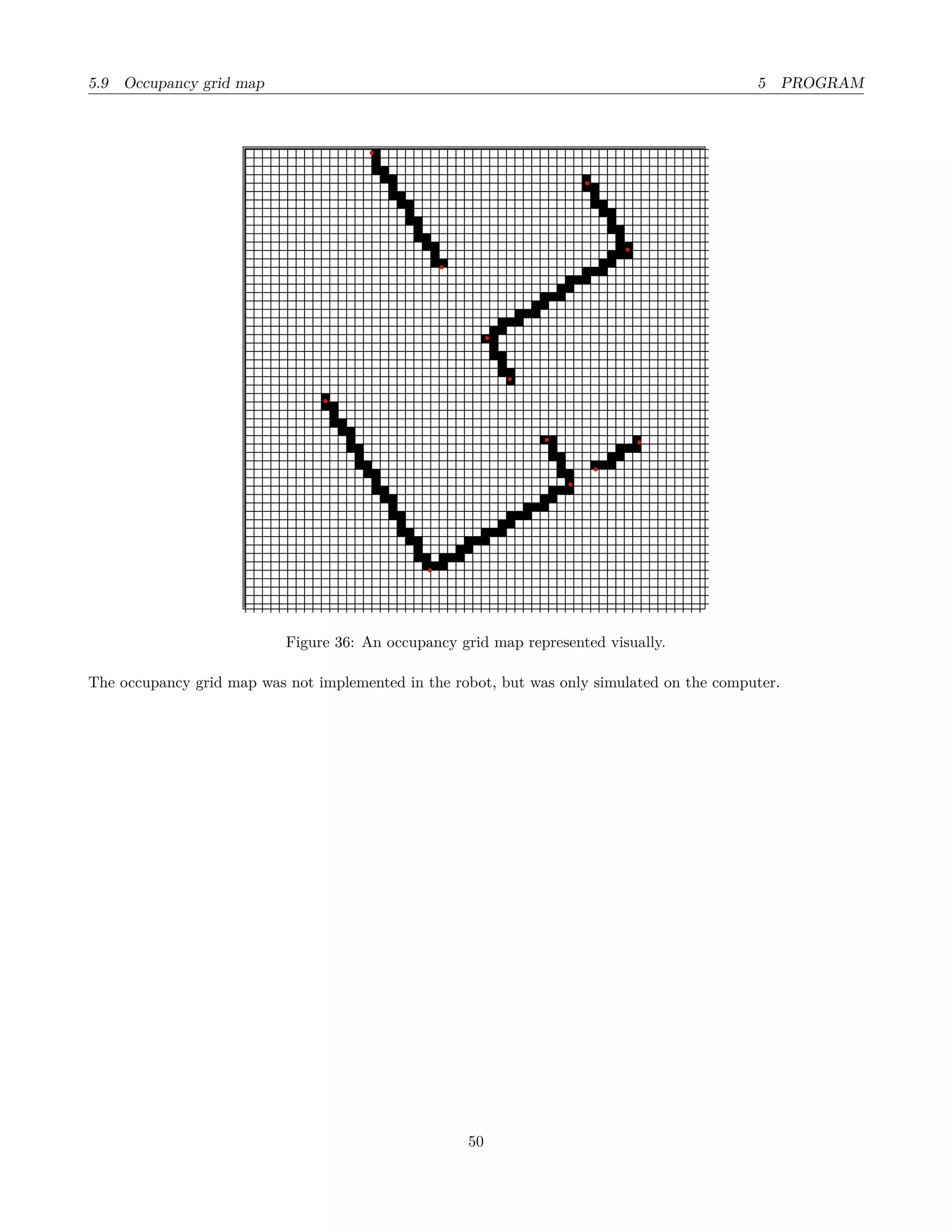
5.9 Occupancy grid map
In order to be able to use common pathfinding algorithms like A*, the map had to be converted into an occupancy
grid map. That is a binary map with a given metric resolution that tells if a space is occupied or not.
We started with a set of corner points, each with a corresponding vector to end of the wall. These are collected
from the line extraction algorithm. For each corner point, make a parameterization of the line between the corner
and the end.
−→
l (t) =
−→
P end − t(
−→
P start −
−→
P end) t [0, 1] (5.30)
Where
−→
P end is the endpoint,
−→
P start is the startpoint and t is the parameter. Traverse the line by increasing t with
a tstep and check which grid cell each point lies on by dividing by the resolution and rounding down to the nearest
integer.
49](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-49-2048.jpg)
![6 TESTING
6 Testing
6.1 White-box testing
To test the software of the robot, white-box testing was used. White-box testing is a method of testing software
that tests the internal structure of the program. White-box testing can be applied at the unit and integration level.
[18] Unit testing is the testing of individual modules. Does various input yield the expected output? Integration
testing is the testing of modules in groups. Unit tests are used to ensure that code meets its design and behaves as
intended.
6.2 Motor accuracy and performance
A good place to start testing is the performance and accuracy of the motors as this affects how the actuators react
to control inputs. We begin with tuning the PID controllers for each motor. The reference input or set point for
the motor PID controller is the rotational velocity we would like to achieve at the gearbox axle given in radians per
second. Positive rotational direction is counter clockwise when looking straight at the gearbox output shaft. The
feedback or process variable for the PID is the rotational velocity at the gearbox output shaft. Rotational velocity
is computed with data from the motor encoder then accounting for gearbox ratio. We want the motor to achieve
the set velocity as quickly as possible while maintaining smooth jitter free acceleration, little to no overshoot from
the set point and settle at this reference velocity. For safety and peace of mind the AGV is placed on a platform
with the wheels rotating freely without contact with the ground. Keep in mind however that the PID parameters
gained from this initial stage will have to be re tuned once the AGV is placed on the ground as the motors then
have to accelerate the mass of the complete system, not just the wheels spinning freely midair.
Recipe for practical PID tuning:
While this process will not give the perfect PID parameters, it will get you close to it and ensure you get a decent
controller and hence a responsive system. [19]
1. Set Kp = 1, Ki = 0, Kd = 0.
2. Increase Kp (proportional gain) until the motor achieves steady oscillation when given change in input. Then
set Kp to 80% of this value.
3. Increase Ki (Integral gain) to eliminate the steady state error as quickly as possible. Too high Ki will lead
to the motor oscillating around the set point, reduce it.
4. Keep going back and forth between Kp and Ki, making small changes for further improvement to overshoot,
performance and stability.
5. If possible introduce some disturbance to the system, in the case of a wheeled robot, simply grab the wheel
to restrain its motion the let go of the grip. Observe the response and adjust your controller if an unstable
response is observed.
6. Experiment with low values of Kd (derivative gain) for increased responsiveness. Often times a PI controller
will suffice and Kd can be left to 0.
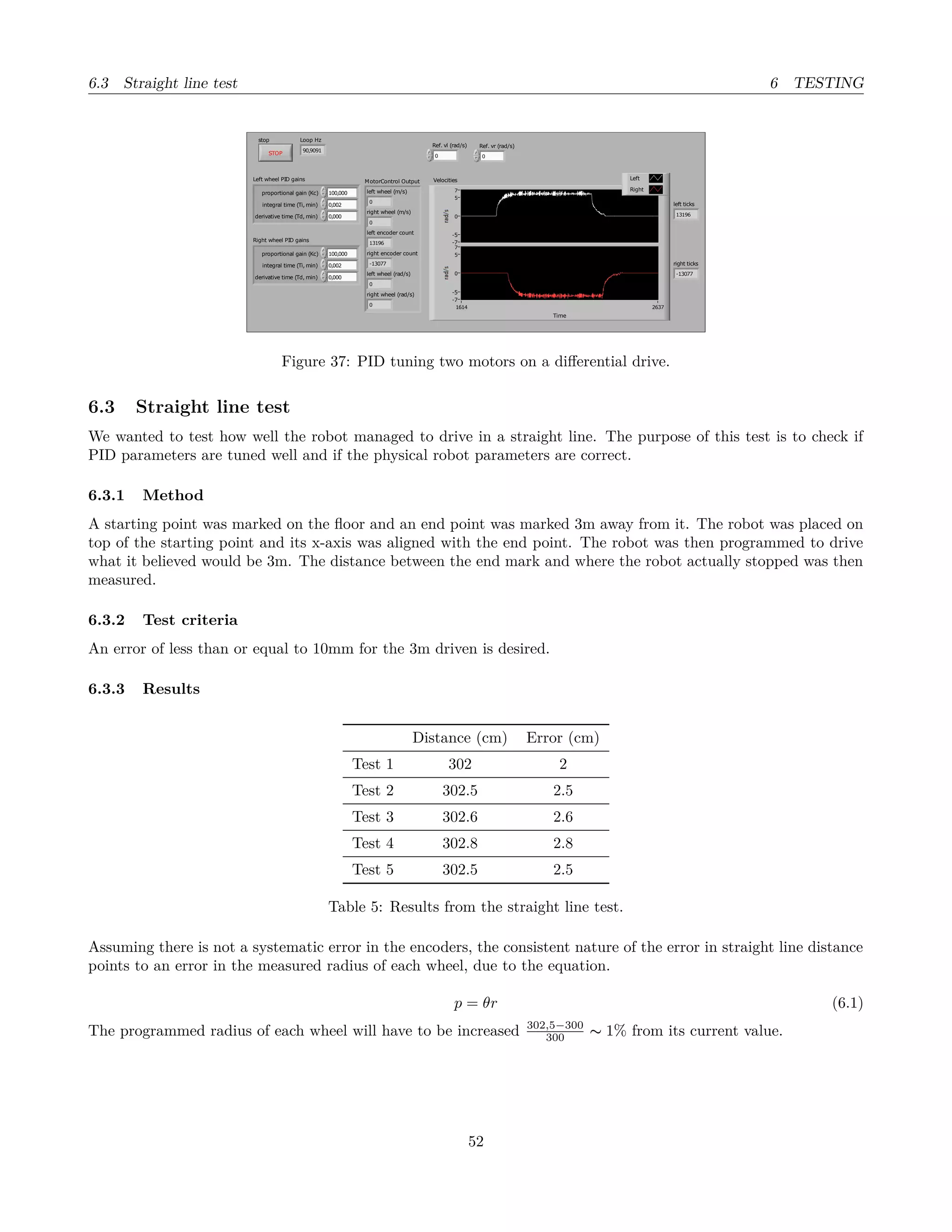
Remember we want stability and reliability first, then performance secondary to that. Below is a result from tuning
two motors to give a smooth response within the working envelope of this specific differential drive. The boundaries
are -6 to 6 radians/second measured on gearbox output shaft.
51](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-51-2048.jpg)
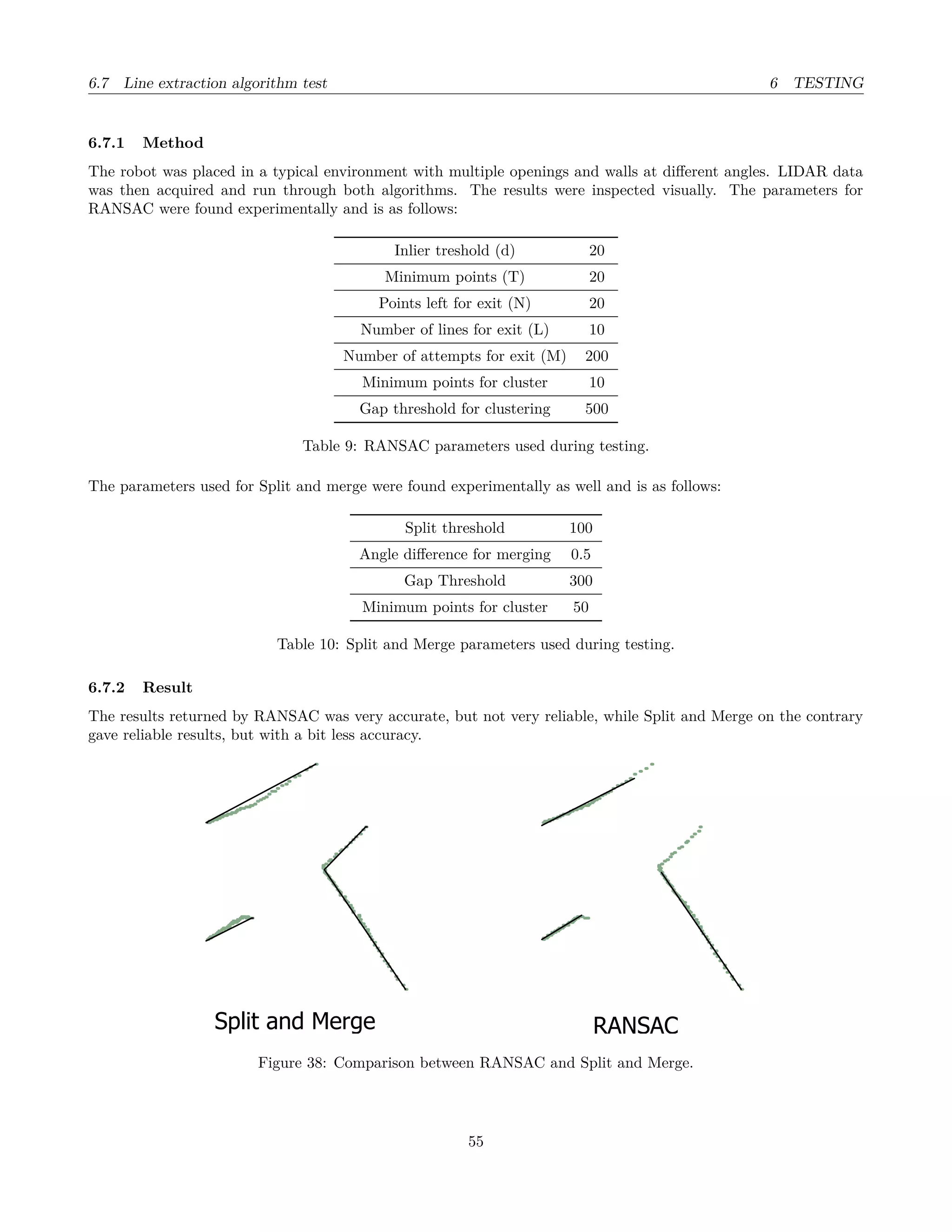
![6.8 System test 6 TESTING
This could have been caused by not having the optimal parameters. RANSAC has a complexity of S×N ×N.Trials
while Split and Merge has a complexity of N × log N, where N is number of points in the dataset, S is the number
of lines extracted and N.Trials is the number of trials for RANSAC. [20] The split and merge algorithm requires
the data to be sorted by angle and that is exactly what the LIDAR returns. This concludes that Split and Merge
should be our obvious choice.
6.8 System test
This is the final test where we test how well the system works together. The robot is placed in a rectangular
coridor that meets itself at the end. It is supposed to drive throught this corridor to see how well it manages to
simultaneous determine own position and map the environment.
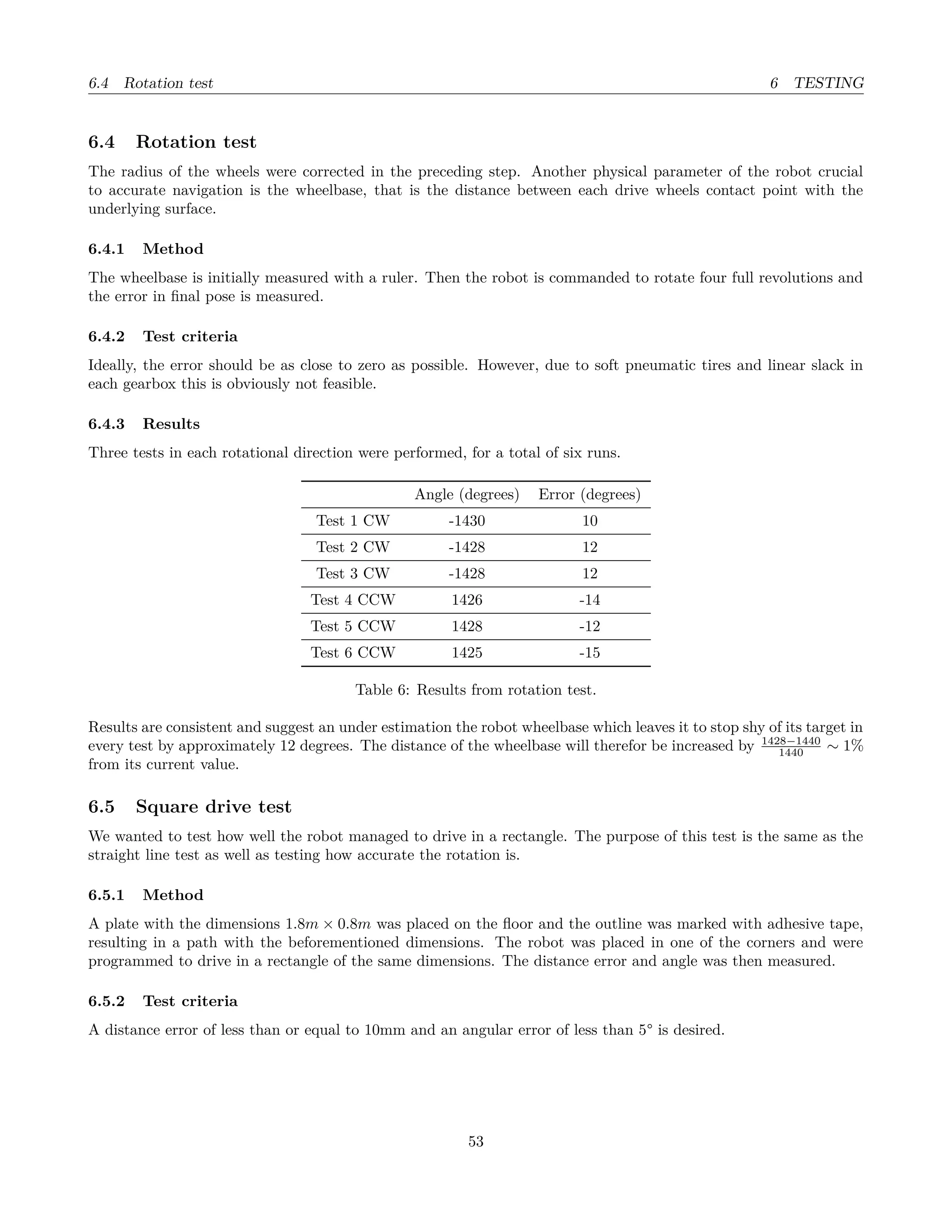
6.8.1 Result
Figure 39: Results from testing the robot
The mapping gave promising results, but because of increased uncertainty of in the mapping over time an earlier
visited place was placed wrongly on the map. This is the effect of not handling loop closure as explained in 2.9 on
page 26. To prevent this, a loop closure algorithm has to be implemented.
56](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-56-2048.jpg)

![REFERENCES REFERENCES
References
[1] R. Maxwell. (2013, January) Robotic mapping: Simultaneous localization and mapping (slam). [Online].
Available: https://www.gislounge.com/robotic-mapping-simultaneous-localization-and-mapping-slam/
[2] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. MIT Press, 2005, ch. 5, p. 118.
[3] P. C. Glasser. (2015, May) An introduction to the use of complementary filters for fusion of sensor data.
[Online]. Available: http://glassercommunications.com/paul/samples/filters_for_fusion.pdf
[4] H. M. Choset, Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005, ch. 8.
[5] Wikipedia. (2016) Extended kalman filter — Wikipedia, the free encyclopedia. [Online]. Available:
https://en.wikipedia.org/wiki/Extended_Kalman_filter
[6] Wolfram MathWorld. (2016, May) Jacobian. [Online]. Available: http://mathworld.wolfram.com/Jacobian.
html
[7] G. Robots. (2016) Various techniques for positioning a mobile robot in a space. [Online]. Available:
http://www.generationrobots.com/en/content/52-localize-with-a-hokuyo-laser-range-finder
[8] Hokuyo. (2005, October) Scanning laser range finder urg-04lx specifications. [Online]. Available:
http://www.hokuyo-aut.jp/02sensor/07scanner/download/pdf/URG-04LX_spec_en.pdf
[9] K. O. Arras. (2009, June) Introduction to mobile robotics. [Online]. Available: http://ais.informatik.uni-
freiburg.de/teaching/ss09/robotics/slides/feature_extraction.pdf
[10] B. Williams, M. Cummins, J. Neira, P. Newman, I. Reid, and J. Tardós, “A comparison of loop closing
techniques in monocular slam,” Robotics and Autonomous Systems, vol. 57, no. 12, pp. 1188–1197, 2009.
[11] U. Uttersrud. (2014, November) Datastrukturer for grafer. [Online]. Available: http://www.cs.hioa.no/~ulfu/
appolonius/kap11/1/kap111.html#11.1.4
[12] M. Yan. (2014, Januar) Dijkstra’s algorithm. [Online]. Available: http://math.mit.edu/~rothvoss/18.304.
3PM/Presentations/1-Melissa.pdf
[13] H. Muñoz-Avila. (2005, October) The a* algorithm. [Online]. Available: http://www.cse.lehigh.edu/~munoz/
CSE497/classes/Astar.ppt
[14] Wikipedia. (2015) Admissible heuristic — Wikipedia, the free encyclopedia. [Online]. Available:
https://en.wikipedia.org/wiki/Admissible_heuristic
[15] National Instruments. (2014, April) From student to engineer: Preparing future innovators with the ni
labview rio architecture. [Online]. Available: http://www.ni.com/white-paper/52093/en/
[16] ——. (2015, Mars) Introduction to ni linux real-time. [Online]. Available: http://www.ni.com/white-
paper/14627/en/
[17] X. Smith and N. Asgari. (2014) Robot localisation, navigation and control using national intruments myrio.
[Online]. Available: https://wiki.csem.flinders.edu.au/pub/CSEMThesisProjects/ProjectSmit0949/Thesis.pdf
[18] Wikipedia. (2016, April) White-box testing — Wikipedia, the free encyclopedia. [Online]. Available:
https://en.wikipedia.org/wiki/White-box_testing
[19] F. Haugen. (2010, April) Tuning of pid controllers. [Online]. Available: http://home.hit.no/~hansha/
documents/control/theory/tuning_pid_controller.pdf
[20] N. T. R. S. Viet Nguyen, Agostino Martinelli. (2005) Comparison of line extraction algorithms using 2d
laser rangefinder for indoor mobile robotics. [Online]. Available: http://infoscience.epfl.ch/record/97571/files/
nguyen_2005_a_comparison_of.pdf
59](https://image.slidesharecdn.com/34004307-fe03-4b32-977a-e37abdb14a4d-160515062200/75/UiA-Slam-Oystein-Oihusom-Orjan-l-Olsen-59-2048.jpg)