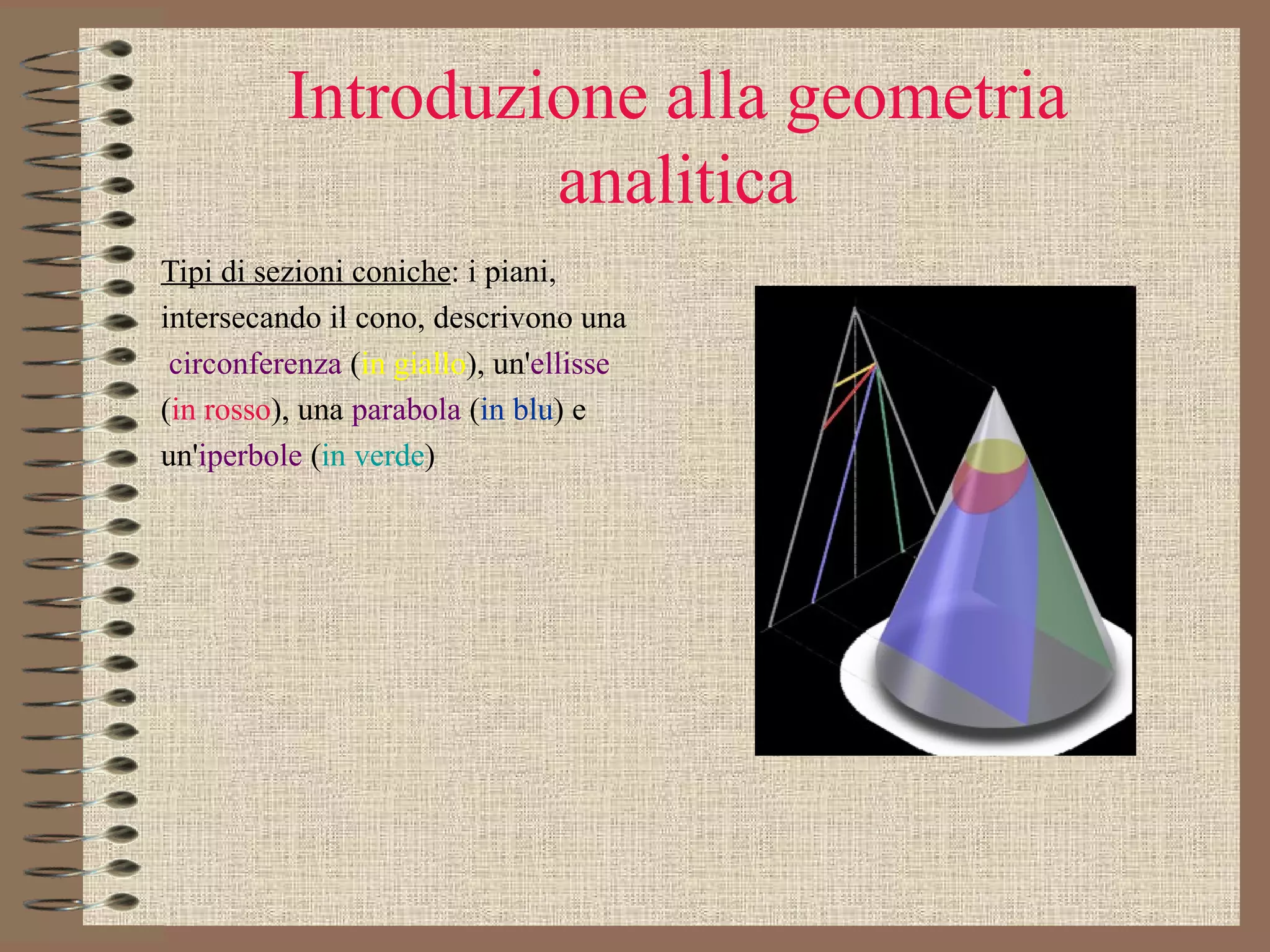
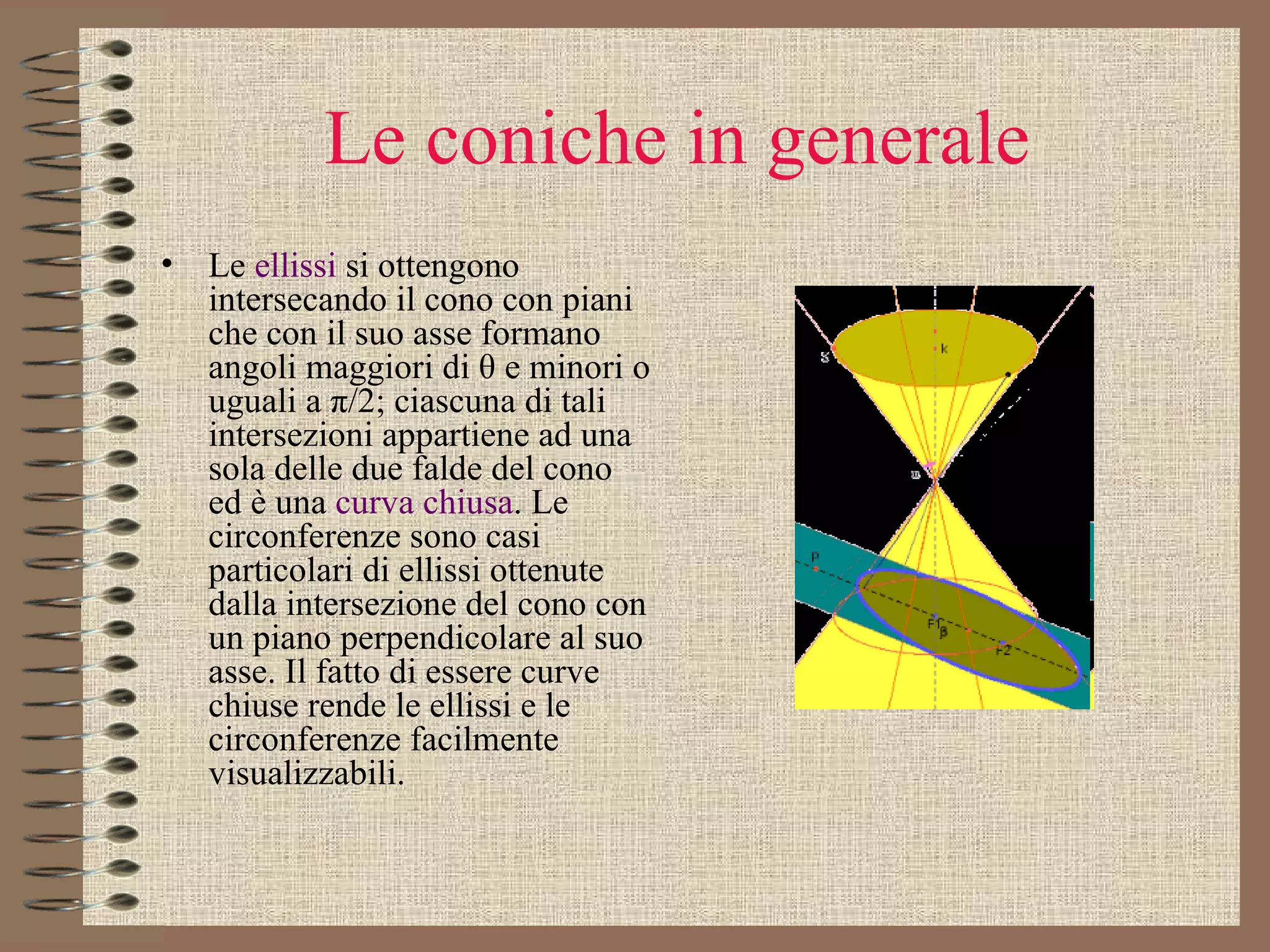
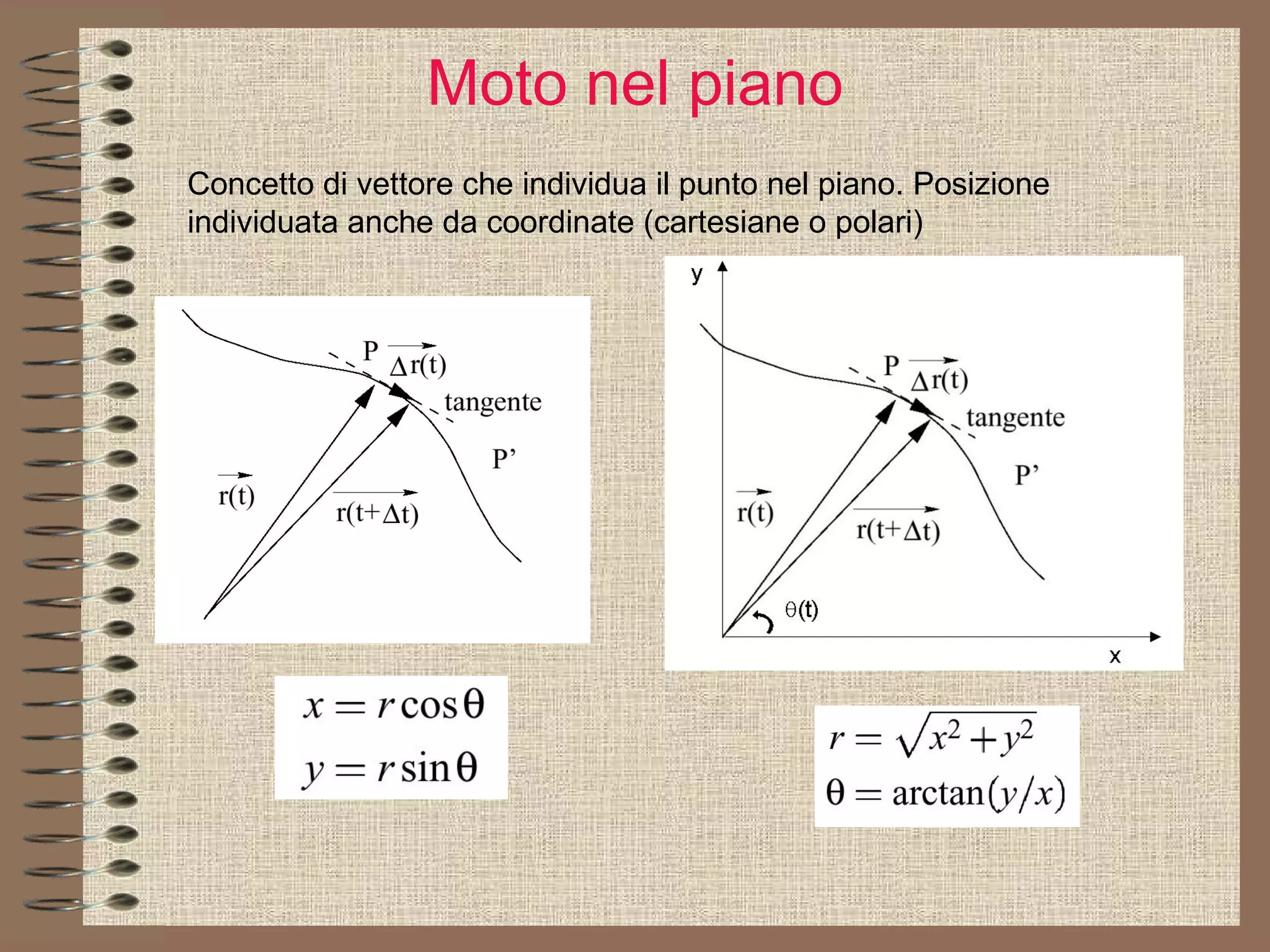
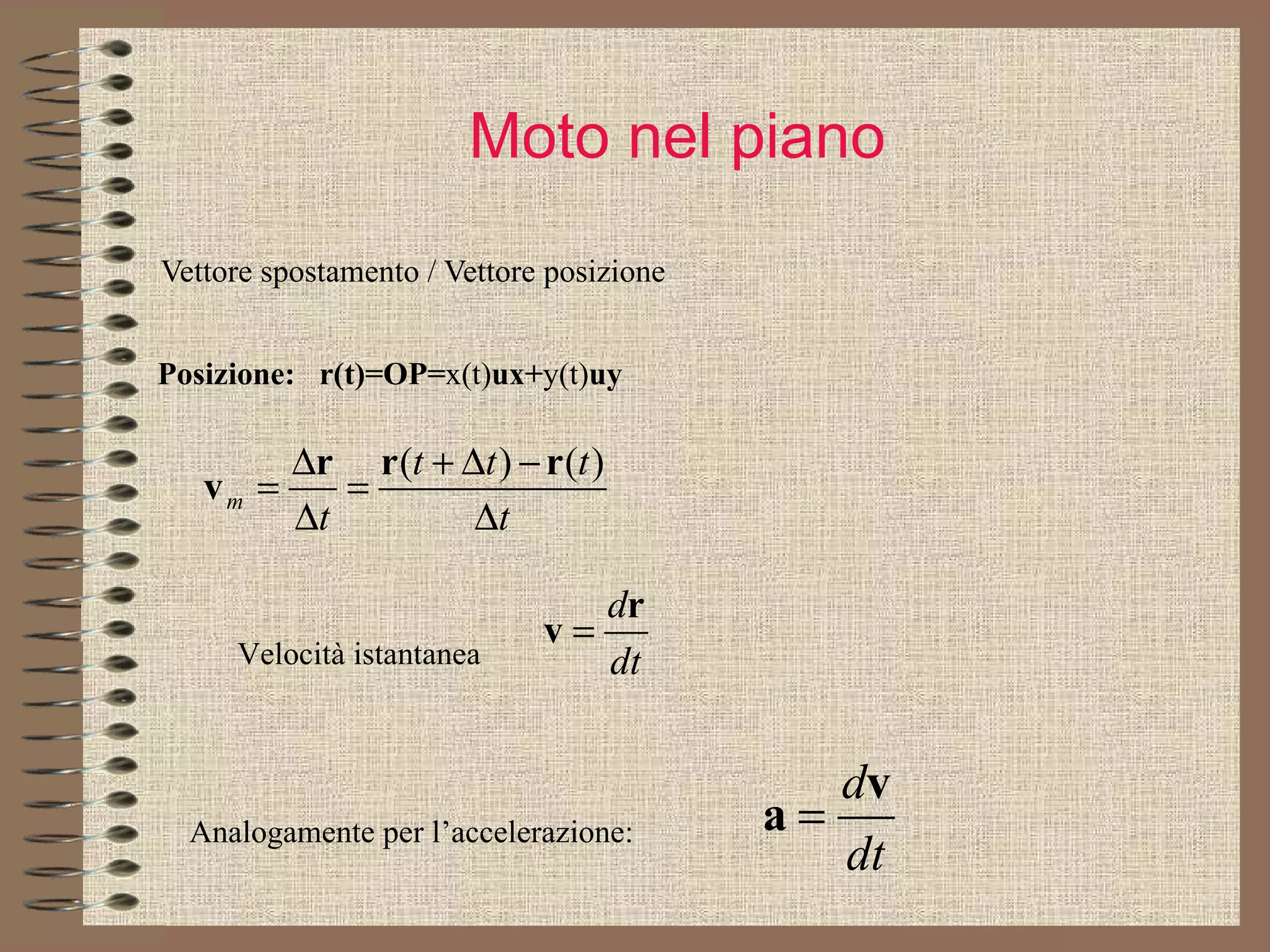
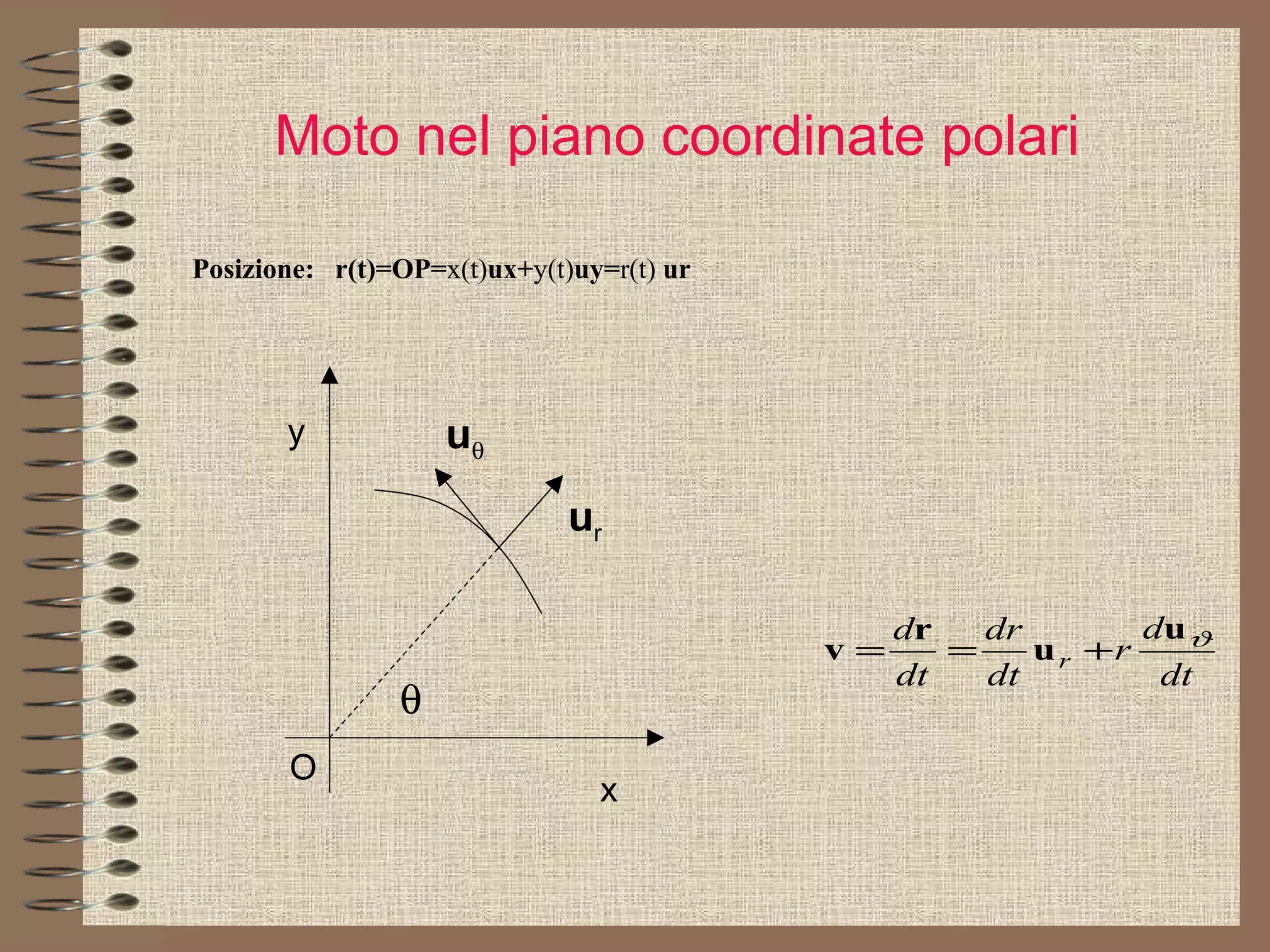
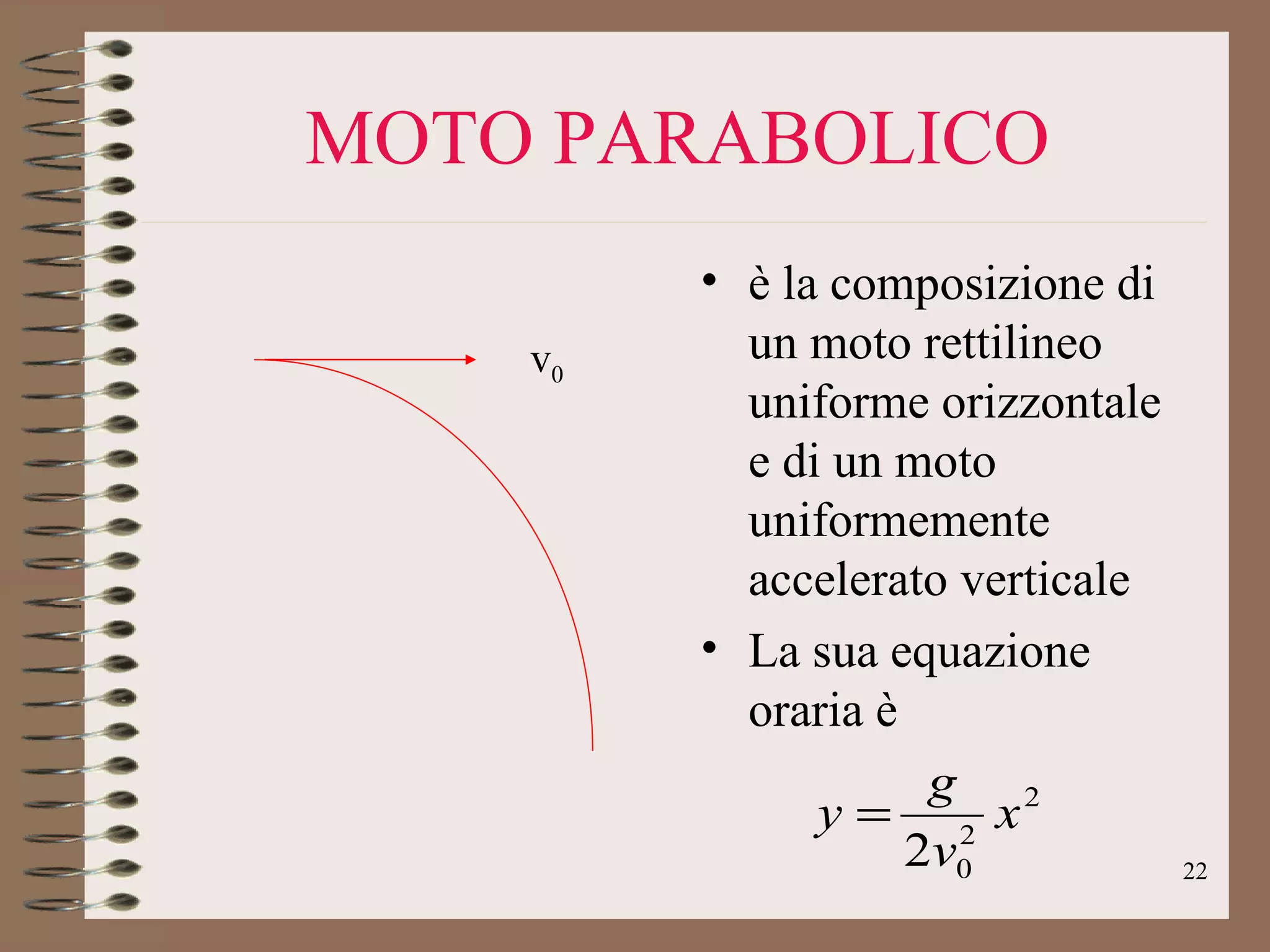
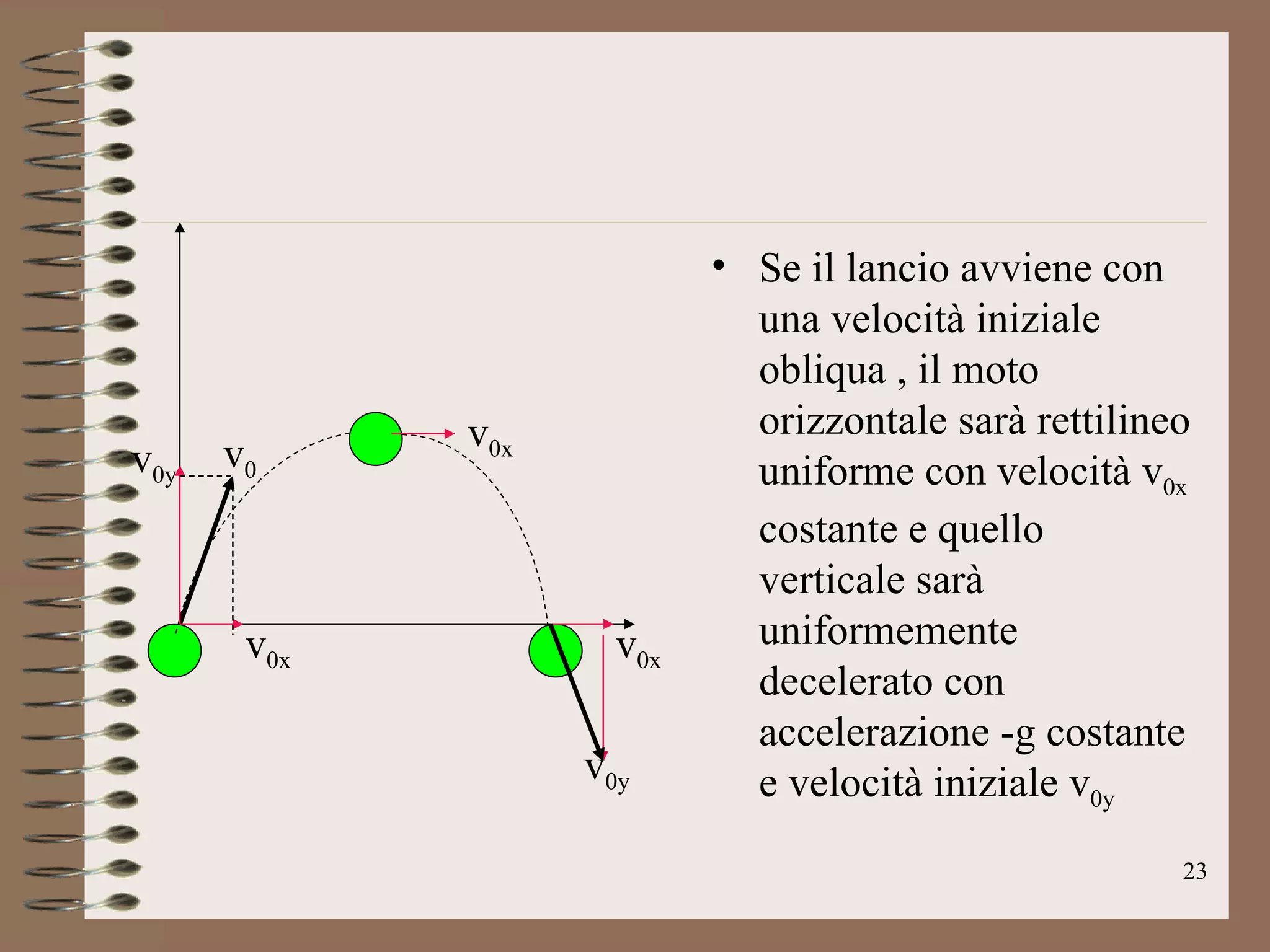
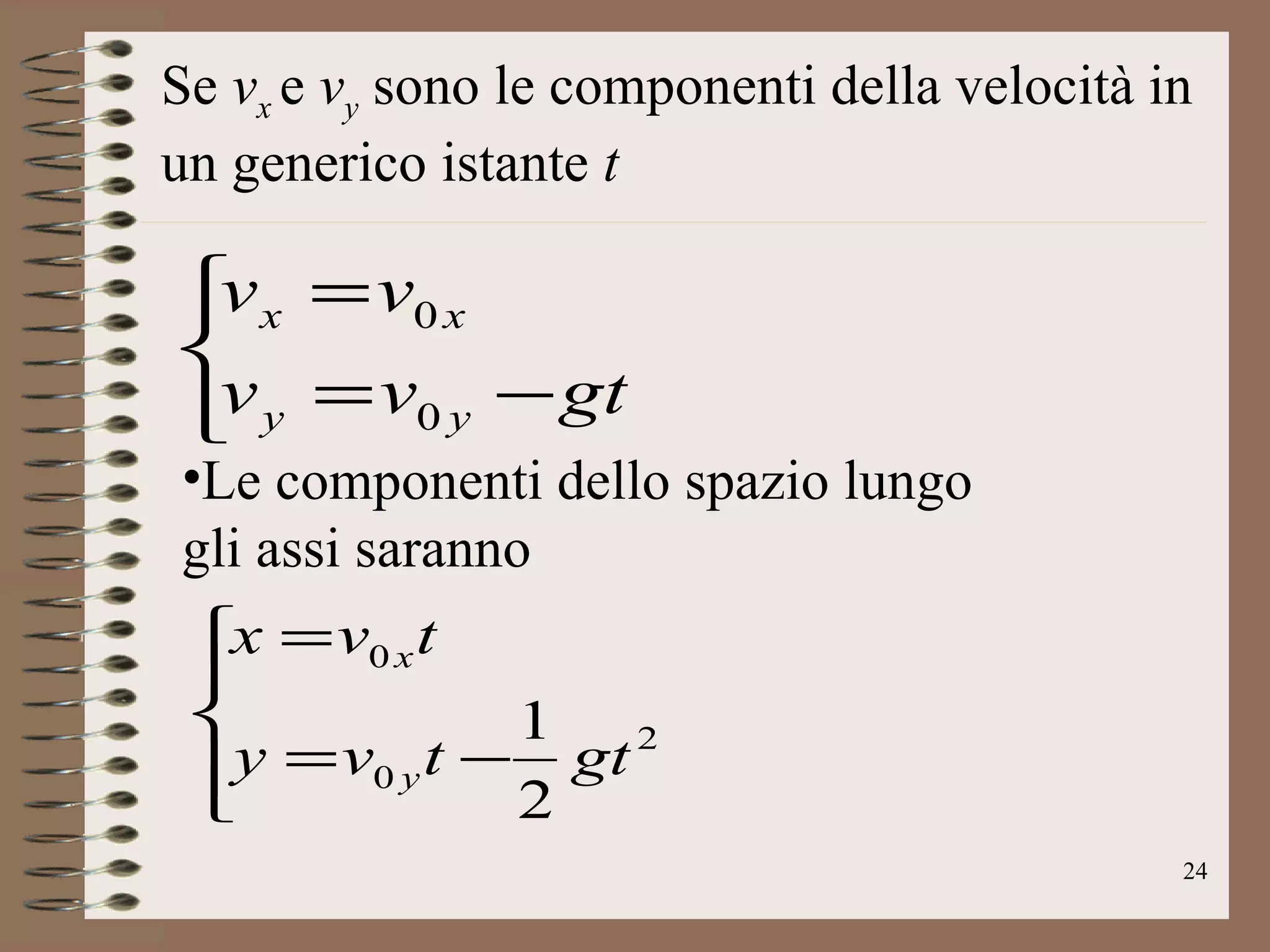
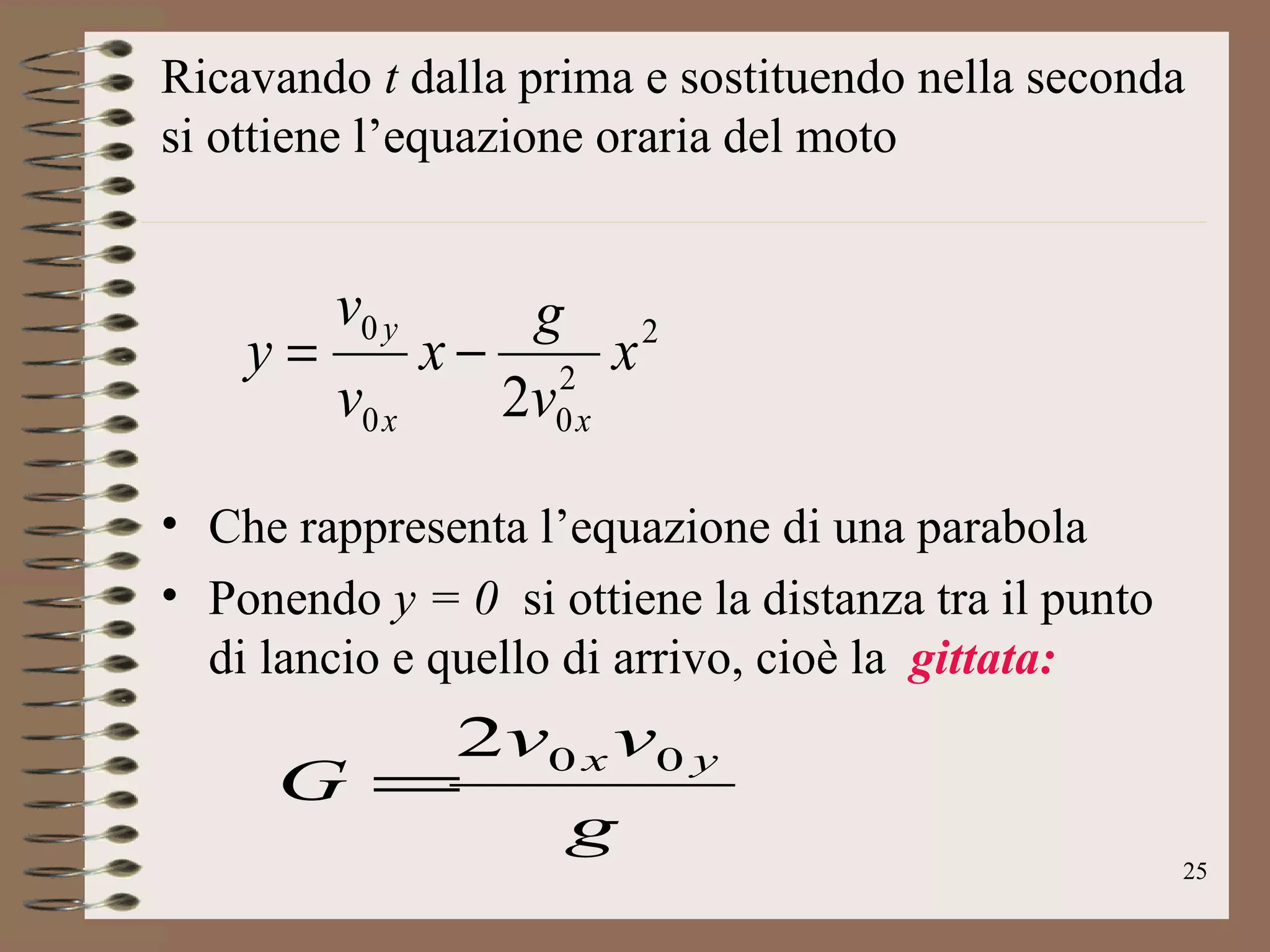
Il documento tratta delle coniche in fisica, concentrandosi sulla circonferenza e la parabola, che descrivono rispettivamente il moto circolare uniforme e il moto parabolico. Viene spiegato come le coniche siano generate dall'intersezione di un cono con un piano e si discute la loro rappresentazione tramite equazioni quadratiche. Infine, il documento analizza le applicazioni fisiche delle coniche, descrivendo il moto nel piano utilizzando sistemi di riferimento cartesiani e polari.