The document discusses the concept of traversing in civil engineering, highlighting the two types of traverses: closed and open. It describes the procedures for performing traverse computations, establishing coordinates, and managing angular and linear misclosure errors. Additionally, it explains methods for adjusting data to ensure mathematical closure in traverse surveys while maintaining accuracy.





![Datum check
Check if the opening and closing control
points are in-situ
Measure distance between and check the
direction by compass/or a theodolite
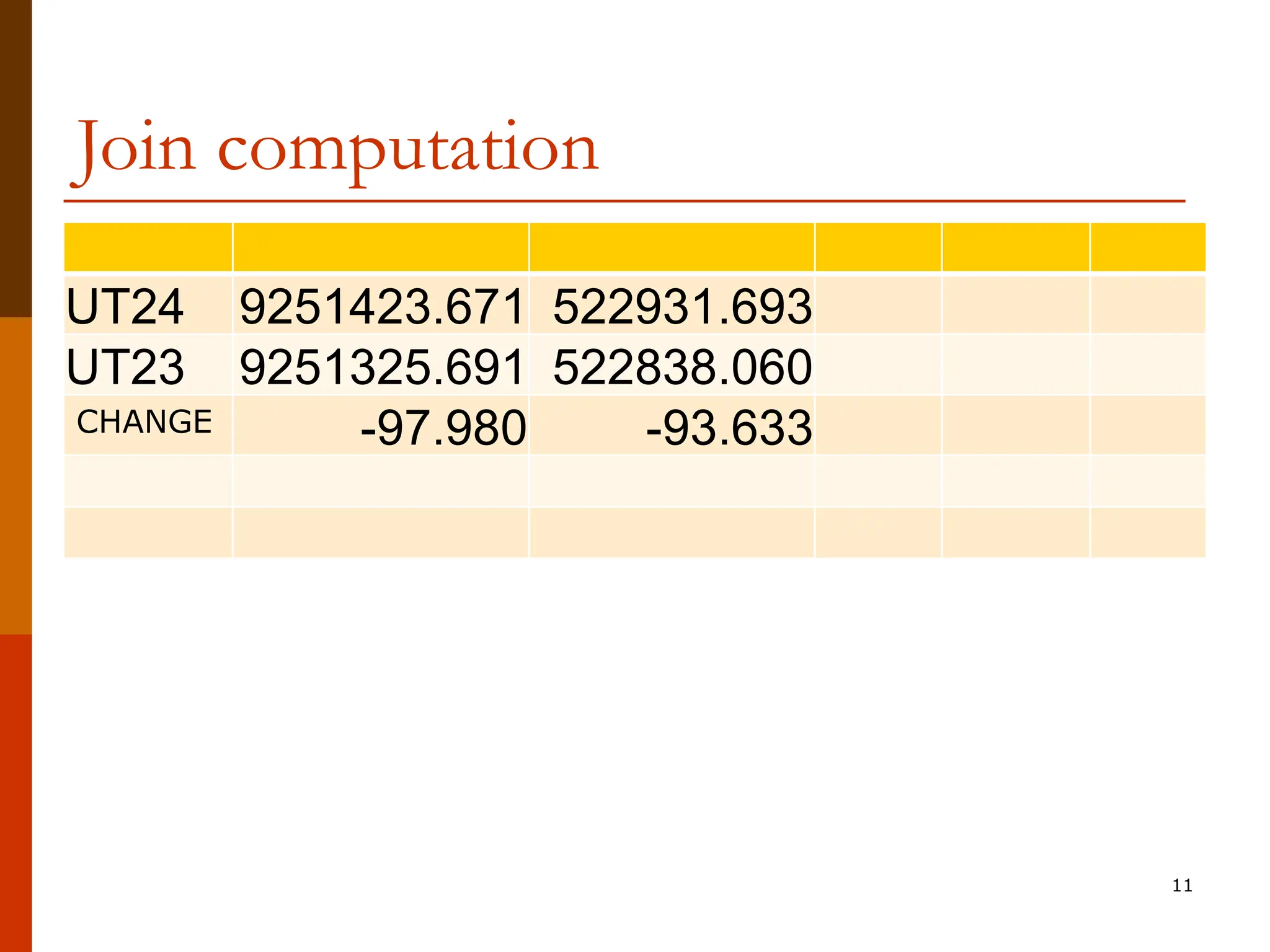
Compute the distance and bearings by
join computation
Compare the results [should be within
limits]
10](https://image.slidesharecdn.com/traverse-240428190850-7ef925dd/75/TRAVERSE-in-land-surveying-and-technique-10-2048.jpg)







![22
Example: Traverse Computation (con’t)
Another options
For each leg, calculate N [Dist * cos(Brg)] & E
[Dist * sin(Brg)].
Compute Sum N and Sum E.
Compare results with diff. between start and end
coords.
The difference is dE and dN](https://image.slidesharecdn.com/traverse-240428190850-7ef925dd/75/TRAVERSE-in-land-surveying-and-technique-22-2048.jpg)









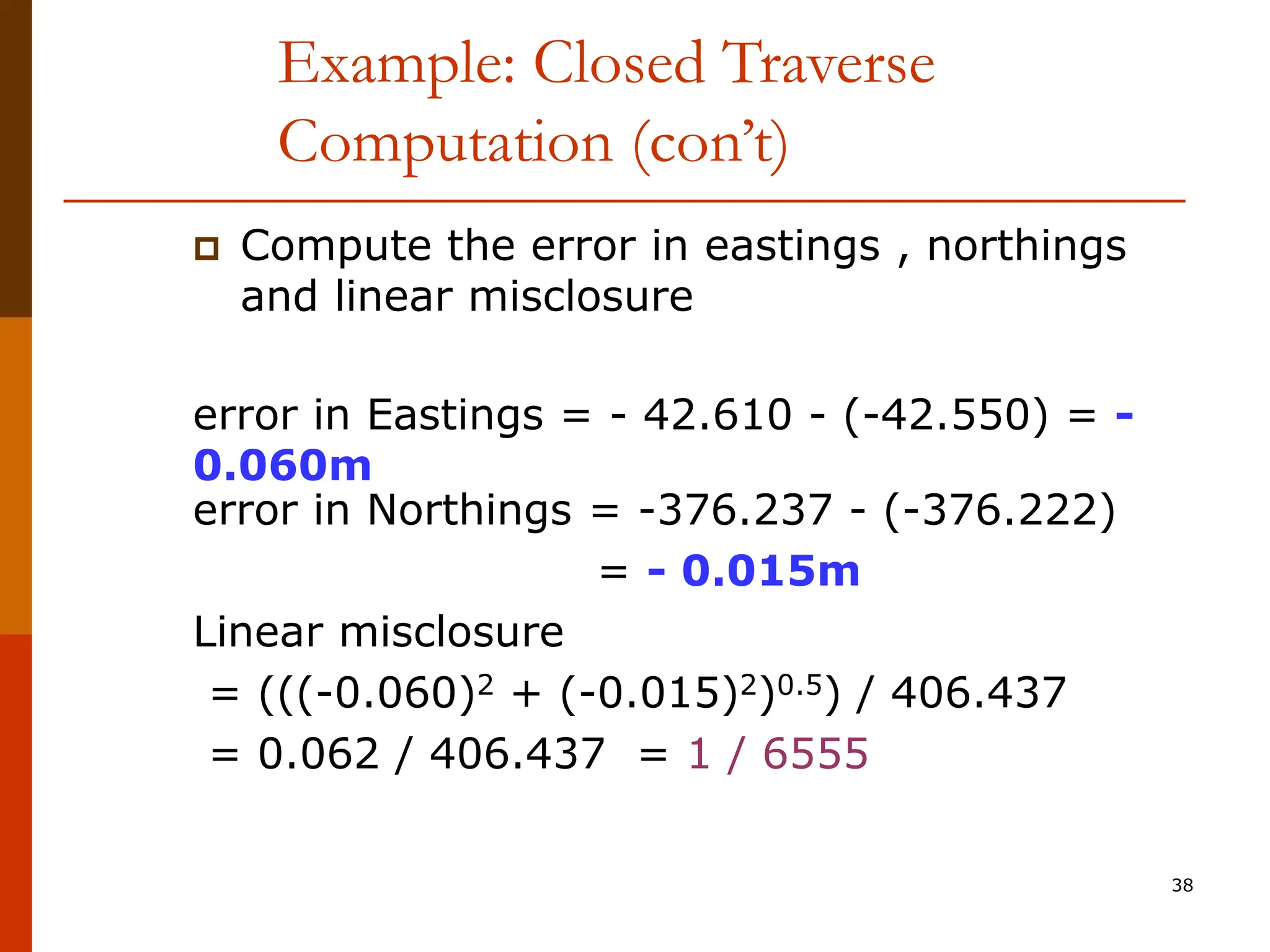
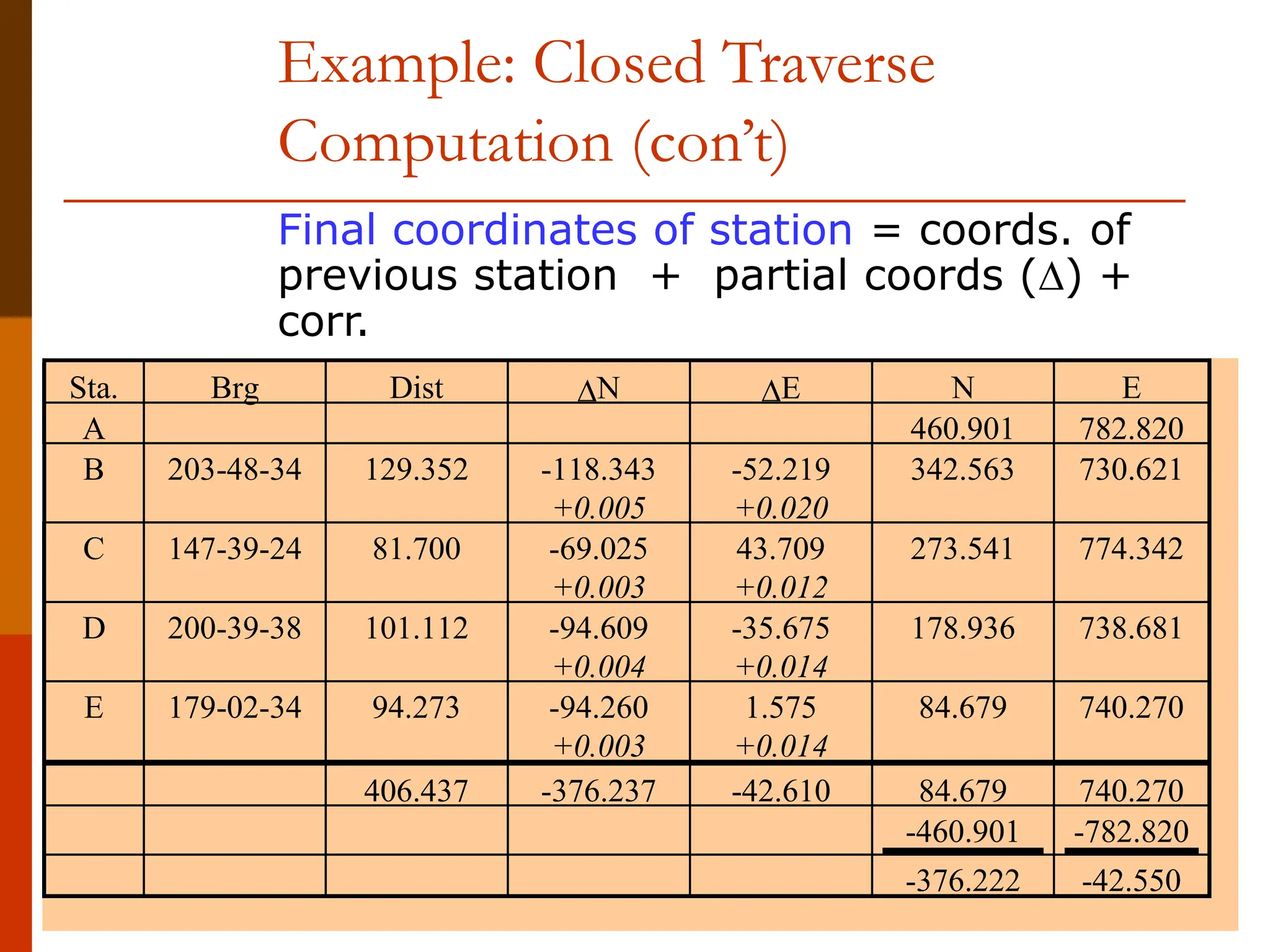
![37
Example: Closed Traverse
Computation (con’t)
For each leg, calculate N [Dist *
cos(Brg)] & E [Dist * sin(Brg)]. Sum N
and E. Compare results with diff.
between start and end coords.
Sta. Brg Dist N E N E
A 460.901 782.820
B 203-48-34 129.352 -118.343 -52.219
C 147-39-24 81.700 -69.025 43.709
D 200-39-38 101.112 -94.609 -35.675
E 179-02-34 94.273 -94.260 1.575
406.437 -376.237 -42.610 84.679 740.270
-460.901 -782.820
-376.222 -42.550](https://image.slidesharecdn.com/traverse-240428190850-7ef925dd/75/TRAVERSE-in-land-surveying-and-technique-37-2048.jpg)