Download as PDF, PPTX



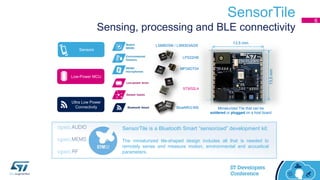
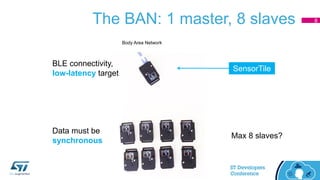
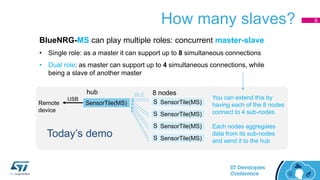
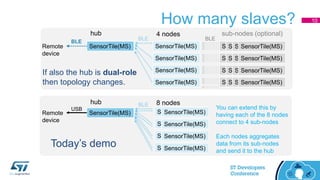
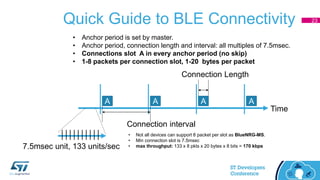
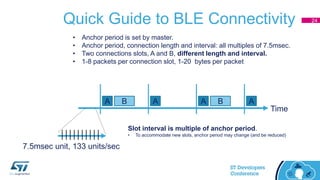
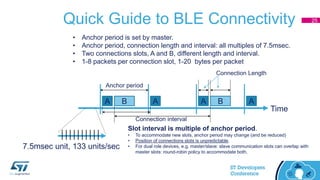




The document details a presentation on setting up a Body Area Network (BAN) using Bluetooth Low Energy (BLE) connectivity and Sensortile devices. It covers the synchronization of multiple sensors for fitness and medical applications, emphasizing the importance of accurate timing and data transmission. Key topics include the architecture of Sensortile, communication protocols, and methods for achieving synchronization among sensor nodes.













































































