Downloaded 61 times



![EML 5526 – Project 2 Ravishankar Venkatasubramanian
6
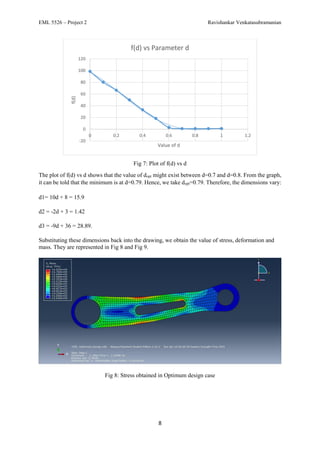
elements. Substitute ∅1= 0.121575, ∅2= 0.122179 and h1=0.7 and h2=0.59. Since Q4 has a first order
complete polynomial, we know that p=1. Hence, the value of q = p+1= 2. Therefore, take q = 2.
∅∞ =
0.121575 × 0.592
− 0.122179 × 0.72
0.592 − 0.72
=> ∅∞ = 0.123660694 𝑐𝑚
It can be noticed that the deformation calculated at infinity is larger than the deformation calculated at
968 nodes.
Part 4: Parametric Study:
The parametric study is performed in order to obtain the optimum design, with lowest mass. The
formula mentioned in the question provides a method to optimise the design with lowest material use
and also able to withstand a stress of 240 MPa. This analysis is done by varying the values of d1, d2 and
d3 from Fig 1 with respect to the equations mentioned below:
d1= 10d + 8
d2 = -2d + 3
d3 = -9d + 36
where d varies from [0,1]. This variation is made into ten increments, starting from d=0, in steps of 0.1.
The parametric study is performed, changing the design, while maintaining the mesh size. Although Q8
provides more accurate results in the parametric study, Q4 is used in this study because of the restriction
of maintaining the mesh size as the one used in the convergence study. The study is performed to
determine the maximum deformation at the edge and maximum stress values. With the change in value
of d, there is a change in the stress and deformation of the design. The change in dimensions for every
step increase of change in d is mentioned in Table 3.
Table 3: Change in dimensions
These change in dimensions are applied to the geometry. An example of the changed geometry is given
in Fig 6.
d d1 d2 d3
0 8 3 36
0.1 9 2.8 35.1
0.2 10 2.6 34.2
0.3 11 2.4 33.3
0.4 12 2.2 32.4
0.5 13 2 31.5
0.6 14 1.8 30.6
0.7 15 1.6 29.7
0.8 16 1.4 28.8
0.9 17 1.2 27.9
1 18 1 27](https://image.slidesharecdn.com/project2-finalreport-160505143602/85/Torque-Arm-Modeling-Simulation-Optimization-using-Finite-Element-Methods-6-320.jpg)



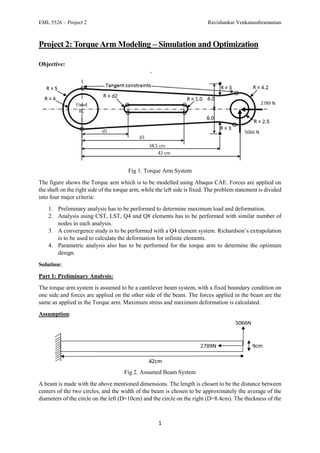
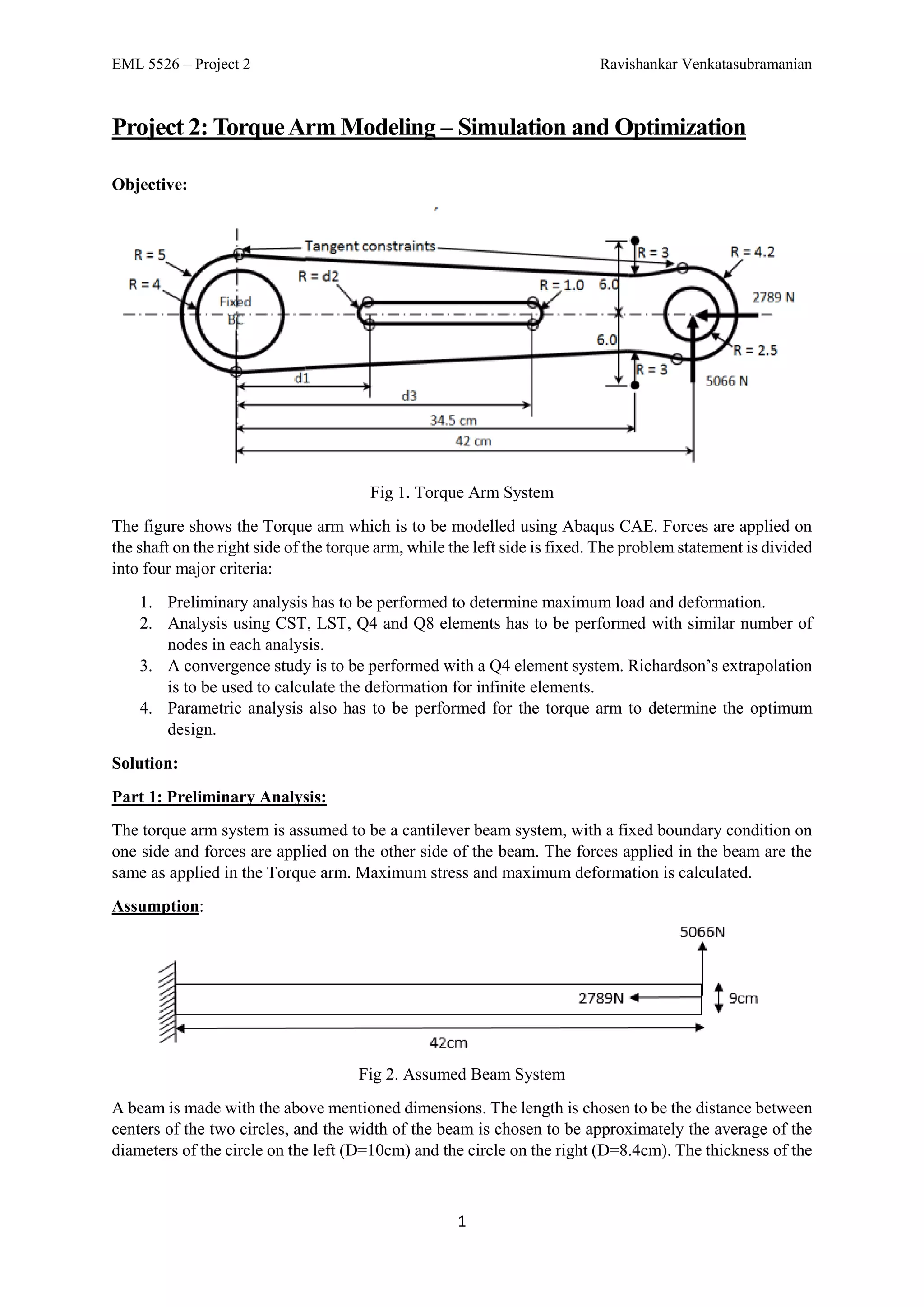
The document details Project 2 on modeling, simulating, and optimizing a torque arm system using Abaqus CAE. It encompasses preliminary analysis, a series of finite element analyses with different element types, a convergence study, and a parametric study to determine optimum design parameters while maintaining material efficiency and stress limits. The findings illustrate the importance of mesh refinement and stress concentration in accurate modeling of the torque arm system.


































































